1.本发明属于图像处理和目标检测的技术领域,具体涉及一种基于暗通道法的雾天车辆检测方法。
背景技术:
2.雾天驾驶的危险程度较高,这是由于雾天的能见度较低,导致车内驾驶员的可视距离较短,容易因未及时发现前方车辆而导致追尾事故的发生。随着汽车智能化的快速发展,越来越多的车辆具备了雾天车辆检测的功能,在雾天驾驶时,辅助驾驶员发现前方车辆,避免追尾事故的发生,提高雾天驾驶的安全性。
3.中国专利cn201910633933.7一种雾天环境中的车辆检测方法及装置,该方法首先采集交通图像进行灰度处理,将灰度图像中亮度值最大的区域中所有像素点的平均亮度值作为大气光强度,进而将灰度图像划分为亮区域和暗区域并生成由暗区域和亮区域的透射率组成的自适应透射率,将大气光强度和自适应透射率输入大气散射模型,对交通图像进行去雾处理,最后通过目标检测算法识别去雾图像中的车辆图像;该方法去雾的效果较差,检测车辆的准确性较弱。中国专利cn201710452155.2基于车辆前照灯和雾灯关联配对的浓雾天车辆检测方法,该方法主要是基于车灯的配对以及前照灯和雾灯的关联配对,来消除车灯反射光对车辆检测的干扰,没有公布具体的图像去雾和车辆检测手段。
4.因此,需要提出一种操作简单、准确性高的雾天车辆检测方法来辅助驾驶员在雾天对前方车辆的识别能力,从而提高雾天驾驶的安全性。
技术实现要素:
5.针对现有技术的上述不足,本发明要解决的技术问题是提供一种基于暗通道法的雾天车辆检测方法,解决目前雾天车辆检测方法存在去雾效果和准确性较差的问题,取得提高雾天驾驶安全性的效果。
6.为解决上述技术问题,本发明采用如下技术方案:
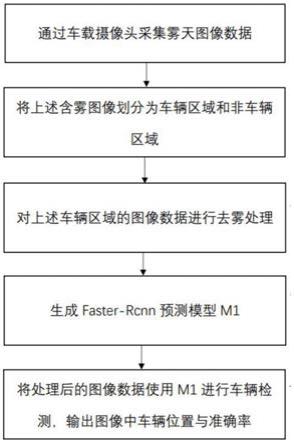
7.一种基于暗通道法的雾天车辆检测方法,包括如下步骤:
8.1)通过车载摄像头采集雾天图像;
9.2)将所述雾天图像分割为车辆区域图像和非车辆区域图像;
10.3)对车辆区域图像进行去雾处理;
11.4)使用训练数据集对目标检测模型进行训练,生成预测模型;
12.5)利用预测模型对经过去雾处理的车辆区域图像进行车辆检测,输出车辆的位置和对应的准确率。
13.进一步地,步骤3)包括如下子步骤:
14.31)车辆区域图像为i(x,y),确定i(x,y)的暗原色i
dark
(x,y);
15.32)根据暗原色i
dark
(x,y)确定i(x,y)的天空亮度a;
16.33)根据暗原色i
dark
(x,y)和天空亮度a确定折射率t(x,y);
17.34)对i(x,y)的rgb三通道分别进行去雾处理,得到三个通道的图像数据jc(x,y)。
18.进一步地,步骤31)确定i(x,y)的暗原色i
dark
(x,y)的操作为:将车辆区域图像中每个像素通道中的最小值存入一幅与车辆区域图像大小相同的灰度图中。
19.进一步地,步骤33)根据暗原色i
dark
(x,y)和天空亮度a确定折射率t(x,y)采用如下公式:
[0020][0021]
其中,a(1)、a(2)、a(3)分别为所述天空亮度a在三个通道上的值,ω为调节参数,用于调节去雾程度,ω∈(0,1)。
[0022]
进一步地,步骤34)中去雾处理采用暗通道去雾算法模型,暗通道去雾算法模型包括如下公式:
[0023][0024]
其中,c∈{r,g,b},t0为t(x,y)的下限值。
[0025]
进一步地,步骤4)中所述训练数据集为kitti数据集。
[0026]
进一步地,步骤4)中所述目标检测模型为faster-rcnn模型。
[0027]
进一步地,步骤4)包括如下子步骤:
[0028]
41)将kitti数据集中的训练数据并转换为voc格式对faster-rcnn模型进行训练,得到训练模型;
[0029]
42)获取真实数据集,真实数据集包括由车载摄像头采集的100张包含车辆的样本雾天图像,真实数据集覆盖场景有城市道路、乡村道路、隧道和桥梁,使用与步骤3)相同的方式对样本雾天图像进行去雾处理;
[0030]
43)将真实数据集输入到训练模型进行车辆检测,得到样本雾天图像中车辆位置和对应的置信度,人工筛选出真实数据中不合格的样本雾天图像,不合格的样本雾天图像包括误检、漏检、分割不准确和置信度低于置信度阈值的90%的样本;
[0031]
44)使用自动标注工具labelimg标记不合格的样本雾天图像中的车辆区域并打上标签,得到voc数据集;
[0032]
45)将voc数据集加入到kitti数据集中对训练模型进行训练,生成预测模型。
[0033]
进一步地,步骤5)包括如下子步骤:
[0034]
51)利用预测模型对经过去雾处理的车辆区域图像进行车辆检测,得到车辆位置和对应的置信度;
[0035]
52)将置信度大于预设值的车辆位置作为最终检测结果输出,并输出车辆位置对应的准确率。
[0036]
相比现有技术,本发明的有益效果如下:
[0037]
本发明所述一种基于暗通道法的雾天车辆检测方法基于图像处理和深度学习,实现雾天车辆检测,通过暗通道法实现去雾,效果较好,通过经典目标检测模型faster-rcnn快速准确的检测出车辆;从而解决目前雾天车辆检测方法存在去雾效果和准确性较差的问题,取得提高雾天驾驶安全性的效果。
附图说明
[0038]
图1为实施例的一种基于暗通道法的雾天车辆检测方法的流程图;
具体实施方式
[0039]
下面结合附图对本发明的具体实施方式作进一步的详细说明。
[0040]
实施例:
[0041]
请参见图1,一种基于暗通道法的雾天车辆检测方法,包括如下步骤:
[0042]
1)通过车载摄像头采集雾天图像;
[0043]
本实施例中,所述车载摄像头固定于车辆前方的中心位置。
[0044]
2)将所述雾天图像分割为车辆区域图像和非车辆区域图像;
[0045]
本实施例中,根据摄像头的光学原理对车载摄像头采集的雾天图像进行分割截取,将雾天图像中上部分的非车辆区域图像去除,减少不相干元素的干扰;
[0046]
非车辆区域即为雾天图像中一般不会出现车辆的区域,如果非车辆区域图像存在车辆,即较本车较远处存在车辆,车辆检测算法在无雾条件下检测效果也非常差,故可不予考虑。
[0047]
3)对车辆区域图像进行去雾处理;包括如下子步骤:
[0048]
31)车辆区域图像为i(x,y),将车辆区域图像中每个像素通道中的最小值存入一幅与车辆区域图像大小相同的灰度图中,即是确定i(x,y)的暗原色i
dark
(x,y);
[0049]
32)根据暗原色i
dark
(x,y)确定i(x,y)的天空亮度a;
[0050]
33)根据暗原色i
dark
(x,y)和天空亮度a确定折射率t(x,y);采用如下公式:
[0051][0052]
其中,a(1)、a(2)、a(3)分别为所述天空亮度a在rgb三通道上的值,ω为调节参数,用于调节去雾程度,ω∈(0,1),本实施例中,ω取值为0.95;
[0053]
34)对i(x,y)的rgb三通道分别进行去雾处理,得到rgb三通道的图像数据jc(x,y);去雾处理采用暗通道去雾算法模型,暗通道去雾算法模型包括如下公式:
[0054][0055]
其中,c∈{r,g,b},t0为t(x,y)的下限值,原因是减少噪声的干扰,这意味着在非常密集的雾霾区域,会保留少量的雾霾,本实施例中t0取值为0.1;
[0056]
由于场景亮度通常小于大气中的光线亮度,所以在对车辆区域图像进行去雾处理之后,得到的图像一般比较暗淡,不利于后续目标检测模型进行检测,所以一般在对车辆区域图像进行去雾处理之后,还需要对图像做曝光调整。
[0057]
4)使用训练数据集对目标检测模型进行训练,生成预测模型m1;本实施例中,所述训练数据集为kitti数据集,在使用时,将kitti数据集转换为voc格式,kitti数据集包括市区公路、乡村公路和高速公路等场景采集的真实图像数据,每张图像中最多包含15辆车,还有各个程度的遮拦和阻断;所述目标检测模型为faster-rcnn模型。
[0058]
步骤4)包括如下子步骤:
[0059]
41)将kitti数据集中的训练数据并转换为voc格式对faster-rcnn模型进行训练,得到训练模型;
[0060]
42)获取真实数据集,真实数据集包括由车载摄像头采集的100张包含车辆的样本雾天图像,真实数据集覆盖场景有城市道路、乡村道路、隧道和桥梁,使用与步骤3)相同的方式对样本雾天图像进行去雾处理;
[0061]
43)将真实数据集输入到训练模型进行车辆检测,得到样本雾天图像中车辆位置和对应的置信度,人工筛选出真实数据中不合格的样本雾天图像,不合格的样本雾天图像包括误检、漏检、分割不准确和置信度低于置信度阈值的90%的样本;
[0062]
44)使用自动标注工具labelimg标记不合格的样本雾天图像中的车辆区域并打上标签,得到voc数据集;
[0063]
45)将voc数据集加入到kitti数据集中对训练模型进行训练,生成预测模型。
[0064]
5)利用预测模型m1对经过去雾处理的车辆区域图像进行车辆检测,输出车辆的位置和对应的准确率;包括如下子步骤:
[0065]
51)利用预测模型m1对经过去雾处理的车辆区域图像进行车辆检测,得到车辆位置和对应的置信度;
[0066]
52)将置信度大于预设值的车辆位置作为最终检测结果输出,并输出车辆位置对应的准确率。
[0067]
本发明所述一种基于暗通道法的雾天车辆检测方法基于图像处理和深度学习,实现雾天车辆检测,通过暗通道法实现去雾,效果较好,通过经典目标检测模型faster-rcnn快速准确的检测出车辆;从而解决目前雾天车辆检测方法存在去雾效果和准确性较差的问题,取得提高雾天驾驶安全性的效果。
[0068]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。