技术特征:
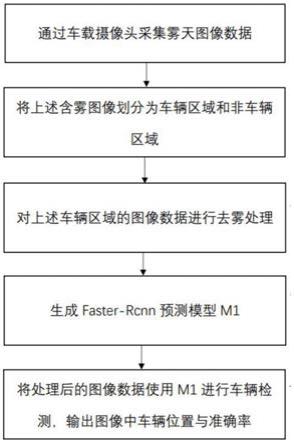
1.一种基于暗通道法的雾天车辆检测方法,其特征在于:包括如下步骤:1)通过车载摄像头采集雾天图像;2)将所述雾天图像分割为车辆区域图像和非车辆区域图像;3)对车辆区域图像进行去雾处理;4)使用训练数据集对目标检测模型进行训练,生成预测模型;5)利用预测模型对经过去雾处理的车辆区域图像进行车辆检测,输出车辆的位置和对应的准确率。2.根据权利要求1所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤3)包括如下子步骤:31)车辆区域图像为i(x,y),确定i(x,y)的暗原色i
dark
(x,y);32)根据暗原色i
dark
(x,y)确定i(x,y)的天空亮度a;33)根据暗原色i
dark
(x,y)和天空亮度a确定折射率t(x,y);34)对i(x,y)的rgb三通道分别进行去雾处理,得到三个通道的图像数据j
c
(x,y)。3.根据权利要求2所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤31)确定i(x,y)的暗原色i
dark
(x,y)的操作为:将车辆区域图像中每个像素通道中的最小值存入一幅与车辆区域图像大小相同的灰度图中。4.根据权利要求3所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤33)根据暗原色i
dark
(x,y)和天空亮度a确定折射率t(x,y)采用如下公式:其中,a(1)、a(2)、a(3)分别为所述天空亮度a在三个通道上的值,ω为调节参数,用于调节去雾程度,ω∈(0,1)。5.根据权利要求4所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤34)中去雾处理采用暗通道去雾算法模型,暗通道去雾算法模型包括如下公式:其中,c∈{r,g,b},t0为t(x,y)的下限值。6.根据权利要求5所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤4)中所述训练数据集为kitti数据集。7.根据权利要求6所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤4)中所述目标检测模型为faster-rcnn模型。8.根据权利要求7所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤4)包括如下子步骤:41)将kitti数据集中的训练数据并转换为voc格式对faster-rcnn模型进行训练,得到训练模型;42)获取真实数据集,真实数据集包括由车载摄像头采集的100张包含车辆的样本雾天图像,真实数据集覆盖场景有城市道路、乡村道路、隧道和桥梁,使用与步骤3)相同的方式对样本雾天图像进行去雾处理;
43)将真实数据集输入到训练模型进行车辆检测,得到样本雾天图像中车辆位置和对应的置信度,人工筛选出真实数据中不合格的样本雾天图像,不合格的样本雾天图像包括误检、漏检、分割不准确和置信度低于置信度阈值的90%的样本;44)使用自动标注工具labelimg标记不合格的样本雾天图像中的车辆区域并打上标签,得到voc数据集;45)将voc数据集加入到kitti数据集中对训练模型进行训练,生成预测模型。9.根据权利要求8所述一种基于暗通道法的雾天车辆检测方法,其特征在于:步骤5)包括如下子步骤:51)利用预测模型对经过去雾处理的车辆区域图像进行车辆检测,得到车辆位置和对应的置信度;52)将置信度大于预设值的车辆位置作为最终检测结果输出,并输出车辆位置对应的准确率。
技术总结
本发明涉及一种基于暗通道法的雾天车辆检测方法,包括如下步骤:1)通过车载摄像头采集雾天图像;2)将所述雾天图像分割为车辆区域图像和非车辆区域图像;3)对车辆区域图像进行去雾处理;4)使用训练数据集对目标检测模型进行训练,生成预测模型;5)利用预测模型对经过去雾处理的车辆区域图像进行车辆检测,输出车辆的位置和对应的准确率。本发明所述一种基于暗通道法的雾天车辆检测方法基于图像处理和深度学习,实现雾天车辆检测,通过暗通道法实现去雾,效果较好,通过经典目标检测模型Faster-Rcnn快速准确的检测出车辆;从而解决目前雾天车辆检测方法存在去雾效果和准确性较差的问题,取得提高雾天驾驶安全性的效果。取得提高雾天驾驶安全性的效果。取得提高雾天驾驶安全性的效果。
技术研发人员:邱渝
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:2022.02.21
技术公布日:2022/5/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。