1.本技术涉及高速子母飞行器低空分离技术领域,特别涉及一种低空高动态下的子母飞行器后向串行释放装置。
背景技术:
2.高速子母飞行器在低空进行子飞行器释放时,具有飞行气动噪声大、飞行器表面热严重、释放过程中质心动态变化剧烈、气动干扰影响严重、释放姿态扰动等不利影响因素,国内外尚未进行相关设计与技术验证。
技术实现要素:
3.本技术实施例提供一种低空高动态下的子母飞行器后向串行释放装置,以解决相关技术中高速子母飞行器在低空、高速进行子飞行器释放时,难以平稳释放子飞行器的问题。
4.本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,包括:
5.子母飞行器,所述子母飞行器包括母飞行器,以及位于所述母飞行器释放仓内部的子飞行器;
6.串行释放单元,所述串行释放单元沿母飞行器的轴线方向固定在所述母飞行器释放仓的内部;
7.所述串行释放单元包括与所述子飞行器滑动连接的锁止导向机构,以及将所述子飞行器从所述母飞行器释放仓内释放出的子飞行器释放机构。
8.在一些实施例中:所述子飞行器的机身外壁上设有多个与锁止导向机构滑动连接的滑块,所述锁止导向机构上设有与滑块滑动连接的导向槽;
9.所述子飞行器的机身外壁上还设有与子飞行器释放机构抵接的推力球头,所述子飞行器释放机构推动推力球头以释放出所述子飞行器。
10.在一些实施例中:所述子飞行器在所述母飞行器内并列设有多枚,所述锁止导向机构包括支撑组件和主承力架组件;
11.所述支撑组件设有多个,各所述子飞行器分别通过滑块与各支撑组件滑动连接;
12.所述主承力架组件位于多个所述子飞行器之间,多枚所述子飞行器均通过滑块与所述主承力架组件滑动连接。
13.在一些实施例中:所述主承力架组件包括长条形主支架,所述导向槽包括位于长条形主支架上的多个分别与所述子飞行器滑动连接的第一滑槽,所述子飞行器的滑块在第一滑槽内直线滑动;
14.所述长条形主支架设有与母飞行器内壁固定连接的安装面,所述长条形主支架远离母飞行器末端的一端设有第一约束块,所述第一约束块固定在所述第一滑槽内。
15.在一些实施例中:所述支撑组件包括长条形支撑导轨,所述导向槽包括位于长条形支撑导轨上与所述子飞行器滑动连接的第二滑槽,所述子飞行器的滑块在第二滑槽内直
线滑动;
16.所述长条形支撑导轨远离母飞行器末端的一端设有第二约束块,所述第二约束块固定在所述第二滑槽内,所述长条形支撑导轨接近母飞行器末端的一端固定设有伸入第二滑槽内的解锁火工作动器。
17.在一些实施例中:所述母飞行器的内壁凸出设有固定连接所述支撑组件和子飞行器释放机构的固定支架,所述支撑组件通过第一转接座与固定支架固定连接,所述子飞行器释放机构通过第二转接座与固定支架固定连接。
18.在一些实施例中:所述子飞行器释放机构包括长条形释放导轨,所述长条形释放导轨上固定连接有将所述子飞行器从所述母飞行器释放仓内释放出的释放火工作动器,所述释放火工作动器的伸缩臂与所述推力球头抵接。
19.在一些实施例中:所述伸缩臂的末端设有与推力球头相互配合的球窝,所述释放火工作动器内设有驱动伸缩臂从释放火工作动器内伸出的火工品。
20.在一些实施例中:所述长条形释放导轨上靠近伸缩臂一端的两侧均设有第三滑槽,所述第三滑槽沿伸缩臂的长度方向延伸;
21.所述伸缩臂的两侧均固定设有与第三滑槽滑动连接的导向块,所述伸缩臂通过导向块在第三滑槽内直线滑动。
22.在一些实施例中:所述母飞行器的末端设有将子飞行器封闭在母飞行器释放仓内的底盖板。
23.本技术提供的技术方案带来的有益效果包括:
24.本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,由于本技术的子母飞行器后向串行释放装置设置了子母飞行器,该子母飞行器包括母飞行器,以及位于母飞行器释放仓内部的子飞行器;串行释放单元,该串行释放单元沿母飞行器的轴线方向固定在母飞行器释放仓的内部;该串行释放单元包括与子飞行器滑动连接的锁止导向机构,以及将子飞行器从母飞行器释放仓内释放出的子飞行器释放机构。
25.因此,本技术的子母飞行器后向串行释放装置在母飞行器释放仓内部设置了串行释放单元。串行释放单元设置了锁止导向机构,子飞行器在锁止导向机构的导向作用下被推入母飞行器释放仓内部后进行可靠锁止,使子母飞行器在飞行过程中子飞行器锁紧可靠。当子飞行器需要释放时,锁止导向机构首先对子飞行器进行解锁,然后子飞行器释放机构驱动子飞行器在锁止导向机构的导向作用下从母飞行器释放仓中释放出来。在释放过程中,子飞行器沿母飞行器的轴向加速并释放,具备冲击小、无污染、分离速度和姿态精确可控,且释放过程无次生伴飞物等。释放后母飞行器外形完整、子母飞行器飞行姿态稳定。
附图说明
26.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
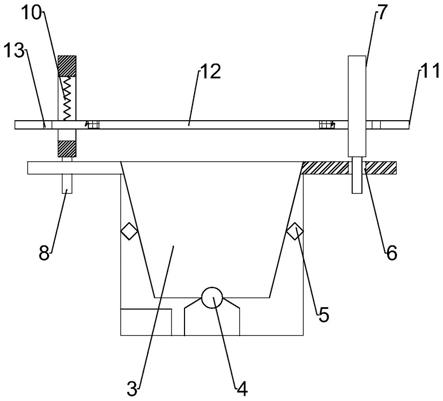
27.图1为本技术实施例的结构示意图;
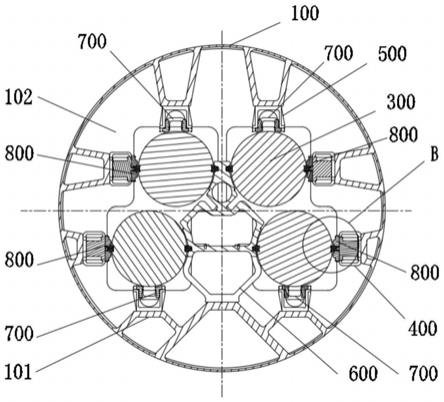
28.图2为图1中沿v1-v1方向的剖视图;
29.图3为图1中沿h2-h2方向的剖视图;
30.图4为图2中沿a1-a1方向的剖视图;
31.图5为图3中a处的局部放大图;
32.图6为图4中b处的局部放大图;
33.图7为图2中c处的局部放大图;
34.图8为图3中d处的局部放大图;
35.图9为本技术实施例的子飞行器的结构示意图;
36.图10为图9中沿a2-a2方向的剖视图;
37.图11为本技术实施例的主承力架组件的结构示意图;
38.图12为图11中沿a3-a3方向的剖视图;
39.图13为本技术实施例的支撑组件的结构示意图;
40.图14为图13中沿a4-a4方向的剖视图;
41.图15为图14中沿a5-a5方向的剖视图;
42.图16为图14中沿a6-a6方向的剖视图;
43.图17为本技术实施例的子飞行器释放机构的结构示意图;
44.图18为图17中沿a7-a7方向的剖视图;
45.图19为图18中沿a8-a8方向的剖视图。
46.附图标记:
47.100、母飞行器;101、固定支架;102、释放仓;200、底盖板;300、子飞行器;310、机身外壁;320、推力球头;330、滑块;400、第一转接座;500、第二转接座;
48.600、主承力架组件;610、长条形主支架;611、第一滑槽;612、安装面;620、第一约束块;700、子飞行器释放机构;710、长条形释放导轨;711、第三滑槽;720、释放火工作动器;721、伸缩臂;722、球窝;730、导向块;
49.800、支撑组件;810、长条形支撑导轨;811、第二滑槽;820、解锁火工作动器;830、第二约束块。
具体实施方式
50.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
51.本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,其能解决相关技术中高速子母飞行器在低空、高速进行子飞行器释放时,难以平稳释放子飞行器的问题。
52.参见图1至图4所示,本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,包括:
53.子母飞行器,该子母飞行器包括母飞行器100,以及位于母飞行器100的释放仓102内部的子飞行器300。母飞行器100为圆柱形承载平台,携带子飞行器300实现高速在低空、高速飞行工况下的平稳释放多枚子飞行器300。在母飞行器100的末端设有将子飞行器300
封闭在母飞行器100的释放仓102内的底盖板200。
54.串行释放单元,该串行释放单元沿母飞行器100的轴线方向固定在母飞行器100的释放仓102的内部。串行释放单元包括与子飞行器300滑动连接的锁止导向机构,以及将子飞行器300从母飞行器100释放仓内释放出的子飞行器释放机构700。锁止导向机构和子飞行器释放机构700的轴线均与母飞行器100的轴线平行。
55.本技术实施例的子母飞行器后向串行释放装置的母飞行器100的直径约800mm、长度约5000mm,释放仓102的内部可挂载4枚子飞行器300(每枚约130千克)。可实现高速飞行(速度不小于1200m/s)、低空(高度10公里-40公里)环境下的快速分离(单枚分离时间不大于0.2s),释放顺序按照预定程序进行,分离后姿态稳定并能按照预先设计编队进行飞行。
56.本技术实施例的子母飞行器后向串行释放装置在母飞行器100的释放仓102内部设置了串行释放单元。串行释放单元设置了锁止导向机构,子飞行器300在锁止导向机构的导向作用下被推入母飞行器100的释放仓102内部后进行可靠锁止,使子母飞行器在飞行过程中子飞行器300锁紧可靠。
57.当子飞行器300需要释放时,锁止导向机构首先对子飞行器300进行解锁,然后子飞行器释放机构700驱动子飞行器300在锁止导向机构的导向作用下从母飞行器100的释放仓102中释放出来。在释放过程中,子飞行器300沿母飞行器100的轴向加速并释放,具备冲击小、无污染、分离速度和姿态精确可控,且释放过程无次生伴飞物等。释放后母飞行器100外形完整、子母飞行器飞行姿态稳定。
58.在一些可选实施例中:参见图5至图10所示,本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,该子母飞行器后向串行释放装置的子飞行器300的机身外壁310上固定设有多个与锁止导向机构滑动连接的滑块330,锁止导向机构上设有与滑块330滑动连接的导向槽。滑块330两两一对并左右对称固定在子飞行器300的前部、中部和后部。
59.子飞行器300在母飞行器100的释放仓102中通过滑块330与锁止导向机构滑动连接,导向槽的长度方向与子飞行器300的轴线平行。子飞行器300能够沿着锁止导向机构的导向槽装入和释放子飞行器300。在子飞行器300的机身外壁310上还设有与子飞行器释放机构700抵接的推力球头320,子飞行器释放机构700通过向母飞行器100的外部推动推力球头320以释放出子飞行器300。
60.在一些可选实施例中:参见图2至图4所示,本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,该子母飞行器后向串行释放装置的子飞行器300在母飞行器100内并列设有多枚,锁止导向机构包括支撑组件800和主承力架组件600。子飞行器300的数量根据母飞行器100的携带能力和实际需要具体设定,本技术实施例的子飞行器300的数量为四枚,四枚子飞行器300围设在主承力架组件600的四周。
61.支撑组件800设有四组,四枚子飞行器300中各枚子飞行器300分别通过滑块330与各支撑组件800滑动连接。主承力架组件600设有一根,且主承力架组件600位于四枚子飞行器300之间,四枚子飞行器300均通过滑块330与主承力架组件600滑动连接。四枚子飞行器300均分别对应滑动连接支撑组件800,四枚子飞行器300共用主承力架组件600且与主承力架组件600滑动连接,提高了释放仓102的空间利用率,子飞行器300的布置更加紧凑。
62.在一些可选实施例中:参见图8、图11和图12所示,本技术实施例提供了一种低空
高动态下的子母飞行器后向串行释放装置,该子母飞行器后向串行释放装置的主承力架组件600包括长条形主支架610,长条形主支架610为空心结构,在长条形主支架610的外壁上设有四个贴合四枚子飞行器300外壁的弧形凹槽。导向槽包括位于长条形主支架610上的四个分别与四枚子飞行器300滑动连接的第一滑槽611,子飞行器300的滑块330在第一滑槽611内直线滑动,第一滑槽611为子飞行器300提供运动导向和周向限位。
63.长条形主支架610的底部设有与母飞行器100内壁固定连接的安装面612,母飞行器100的内壁凸出设有固定连接长条形主支架610的固定支架101,长条形主支架610通过安装面612与固定支架101固定连接,与母飞行器100形成整体。长条形主支架610远离母飞行器100末端的一端设有第一约束块620,第一约束块620固定在第一滑槽611内。第一约束块620与子飞行器300的滑块330相互抵接,以限制子飞行器300的滑块330在第一滑槽611内滑动,实现子飞行器300在释放仓102内的轴向限位。
64.在一些可选实施例中:参见图5、图6、图13至图16所示,本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,该子母飞行器后向串行释放装置的支撑组件800包括长条形支撑导轨810。导向槽包括位于长条形支撑导轨810上与子飞行器300滑动连接的第二滑槽811,子飞行器300的滑块330在第二滑槽811内直线滑动,第二滑槽811为子飞行器300提供运动导向和周向限位
65.在长条形支撑导轨810远离母飞行器100末端的一端设有第二约束块830,第二约束块830固定在第二滑槽811内。长条形支撑导轨810接近母飞行器100末端的一端固定设有伸入第二滑槽811内的解锁火工作动器820。第二约束块830和解锁火工作动器820分别与子飞行器300两端的滑块330相互抵接,以限制子飞行器300的滑块330在第二滑槽811内滑动,实现子飞行器300在释放仓102内的轴向限位。
66.母飞行器的内壁凸出设有固定连接支撑组件800的固定支架101,支撑组件800通过第一转接座400与固定支架101固定连接。第一转接座400用于容纳解锁火工作动器820,解锁火工作动器820能够根据实际需要锁止和解锁子飞行器300,解锁火工作动器820设有与滑块330抵接的限位件。当限位件伸入第二滑槽811内且与滑块330抵接时,此时子飞行器300处于锁止状态;当解锁火工作动器820内的火工品触发时,火工品触动限位件与滑块330分离,此时子飞行器300处于解锁状态。
67.在一些可选实施例中:参见图7、图17至图19所示,本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,该子母飞行器后向串行释放装置的子飞行器释放机构700包括长条形释放导轨710,在长条形释放导轨710上固定连接有将子飞行器300从母飞行器100的释放仓102内释放出的释放火工作动器720,释放火工作动器720的伸缩臂721与推力球头320抵接。
68.在伸缩臂721的末端设有与推力球头320的球面相互配合的球窝722,球窝722与推力球头320的球面相互配合,提升伸缩臂721与推力球头320的定位精度,缩短子飞行器300的释放时间。在释放火工作动器720内设有驱动伸缩臂721从释放火工作动器720内伸出的火工品。当释放火工作动器720内的火工品触发时,火工品触动伸缩臂721推动推力球头320,推力球头320带动子飞行器300与母飞行器100实现分离,此时子飞行器300处于释放状态。
69.在长条形释放导轨710上靠近伸缩臂721一端的两侧均设有第三滑槽711,第三滑
槽711沿伸缩臂721的长度方向延伸。在伸缩臂721的两侧均固定设有与第三滑槽711滑动连接的导向块730,伸缩臂721通过导向块730在第三滑槽711内直线滑动。第三滑槽711为伸缩臂721伸缩运动提供轴向导向和周向限位。在母飞行器100的内壁凸出设有固定连接子飞行器释放机构700的固定支架101,子飞行器释放机构700通过第二转接座500与固定支架101固定连接,第二转接座500用于容纳释放火工作动器720。
70.工作原理
71.本技术实施例提供了一种低空高动态下的子母飞行器后向串行释放装置,由于本技术的子母飞行器后向串行释放装置设置了子母飞行器,该子母飞行器包括母飞行器100,以及位于母飞行器100的释放仓102内部的子飞行器300;串行释放单元,该串行释放单元沿母飞行器100的轴线方向固定在母飞行器100的释放仓102的内部;该串行释放单元包括与子飞行器300滑动连接的锁止导向机构,以及将子飞行器300从母飞行器100的释放仓102内释放出的子飞行器释放机构700。
72.因此,本技术的子母飞行器后向串行释放装置在母飞行器100的释放仓102内部设置了串行释放单元。串行释放单元设置了锁止导向机构,子飞行器300在锁止导向机构的导向作用下被推入母飞行器100的释放仓102内部后进行可靠锁止,使子母飞行器在飞行过程中子飞行器300锁紧可靠。
73.当子飞行器300需要释放时,锁止导向机构首先对子飞行器300进行解锁,然后子飞行器释放机构700驱动子飞行器300在锁止导向机构的导向作用下从母飞行器100的释放仓102中释放出来。在释放过程中,子飞行器300沿母飞行器100的轴向加速并释放,具备冲击小、无污染、分离速度和姿态精确可控,且释放过程无次生伴飞物等。子飞行器300释放后母飞行器100外形完整、子母飞行器飞行姿态稳定。
74.在本技术的描述中,需要说明的是,术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
75.需要说明的是,在本技术中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
76.以上所述仅是本技术的具体实施方式,使本领域技术人员能够理解或实现本技术。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一
致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。