140.但是图像识别的第一步仍需要图像预处理,尽管文献9又增加了概率霍夫变换、文献10则借助了adaboost等算法,但识别率还是较低。也有研究者选择聚类算法,如文献14:许超,陈昊,刘少情,等.基于模型聚类匹配和形态特征识别的保护压板状态辨识技术[j].陕西电力,2017,45(01):32-36 85.与文献15:梁辰,孙建文,王兰玉,等.应用聚类和证据理论实现变电站保护压板状态校核[j].电网技术, 2020,44(06):2343-2349.。但这种方法是通过颜色进行匹配,而通过颜色区分的方法文章曾经也尝试过。在采集图像的过程中,发现有很多硬压板的颜色与屏柜颜色十分接近,都是类驼色,这会使得硬压板与背景难以区分。也有研究者尝试深度学习的方法,比如:文献16:吴迪,汤小兵,李鹏,杨增力,文博,黎恒烜.基于深度神经网络的变电站继电保护装置状态监测技术 [j].电力系统保护与控制,2020,48(05):81-85.doi:10.19783/j.cnki.pspc.190516.采用了卷积神经网络 特征变换;文献17:王伟,张彦龙,翟登辉,等.基于opencv ssd深度学习模型的变电站压板状态智能识别[j/ol].电测与仪表:1-10[2020-09-13]. http://kns.cnki.net/kcms/detail/23.1202.th.20200827.1838.052.html.与文献18:周克,杨倩文,王耀艺,等.一种改进的压板状态识别ssd算法[j/ol].电测与仪表:1-10[2020-09-17]. http://kns.cnki.net/kcms/detail/23.1202.th.20200917.1717.002.html.采用了ssd目标检测模型;文献19:冷从林.基于机器视觉的变电站压板开关状态识别系统研究[d].武汉理工大学,2019. 采用了yolov3目标检测模型,但是其模型精度均低于文章的模型。也有的研究者另辟蹊径,文献20:简学之,刘子俊,文明浩,等.ar增强现实技术在变电站二次设备运检中的应用[j]. 电力系统保护与控制,2020,48(15):170-176.将ar增强现实技术应用在运检中,文献21:许根养,翁士状,孙长翔,等.基于相位特征的保护压板状态的准确识别方法[j].安徽大学学报 (自然科学版),2020,44(03):38-42.还有的提出了一种基于相位竞争编码的压板状态识别方法,以及文献22:高元生,陈强,熊小伏,等.继电保护压板的智能校核方法[j].重庆大学学报, 2015,38(06):91-98.与文献23:张曼,冯凝,刘颖彤,等.500kv智能变电站压板状态监测及智能校核技术[j].电工技术,2018(24):89-90 93.提出了相对特殊的智能校核方法,但总的来说这些方法均难以推广,实用性稍有欠缺。
[0004]
中国专利cn113794277a(申请号:202110980430.4)发明了一种压板状态图像识别方法和系统,该项发明同样是基于深度学习,同样是用移动设备代替人工进行巡检工作,但是该发明的深度学习模型的精度低于本发明,并且其没有对模型的漏检与误检问题做进一步的解决,尽管其模型的漏报率与误报率均不高于3%,但是当发生此类问题时,该项发明只能重新再进行一遍重复操作,而这将降低工作效率。
[0005]
中国专利cn113255827a(申请号:202110669583.7)提出了一种基于yolo nano算法的继保压板状态识别系统及方法,该发明也同样是基于yolo算法以及移动设备,但是该发明中的移动设备只是完成了压板状态的识别工作,而对于巡检工作中的核心校核工作并不是在移动设备完成的,因此该发明需要移动设备与服务器之间进行频繁的数据交换,并且单次交换的数据量更大。
[0006]
本发明所要解决的关键问题如下:
[0007]
1)识别算法的准确率不足。专利公开号(cn)为113794277a的发明中设计的识别模型仍存在近3%的漏报率与误报率,当取像角度倾斜或光线不均时,这种情况尤为明显。漏报和误报情况的出现会导致巡检人员需进行多次取像,降低了工作效率,是亟需解决的问
题。
[0008]
2)误检和漏检的压板更正和补全问题。基于深度学习的目标检测算法无法保证100%的识别正确率,即误检和漏检的情况无法完全杜绝,如发明专利公开号(cn)为113255827a的发明在出现误检和漏检时只能再次拍摄一次图像,重新检测。很多时候,二次检测也不能解决误检和漏检,因此,需要从其他角度解决这一问题。
技术实现要素:
[0009]
为了解决上述问题,本发明提供一种基于目标检测模型的智能变电站继电保护硬压板校核方法。
[0010]
本发明的一种基于目标检测模型的智能变电站继电保护硬压板校核方法,包括以下步骤:
[0011]
步骤1:下载工作任务对应的基准文件,扫描屏柜二维码与基准文件建立联系。
[0012]
工作人员需要先根据本人的工号下载本次的工作任务对应的基准文件,然后就开始巡检工作;在巡检的过程中,对每个屏柜需要先扫描其二维码,将扫描结果用于与基准文件建立联系。
[0013]
步骤2:数据采集与数据增强。
[0014]
在现场拍摄硬压板图片用于制作数据集;使用labelimg工具对拍摄图片进行标注,标注的标签有两种:0-绿色框和1-橙色框,分别代表“投”与“退”两种类别。
[0015]
然后对原图归一化和预处理。
[0016]
步骤3:解析基准文件。
[0017]
将基准文件转化为xml文件,其包括变电站名称、保护装置名称、保护装置身份识别码、硬压板名称和正常运行状态信息;其中,pad标签中的x和y表示第x行第y列的硬压板,没有的位置为备用硬压板;解析基准文件通过dom解析器实现。
[0018]
步骤4:yolov4-tiny模型调用。
[0019]
选择使用opencv的dnn模块调用模型;在调用前先以module的方式,将opencv添加到项目中,再复制opencv库文件到jnilibs文件夹下。
[0020]
步骤5:漏检判定与自动补全。
[0021]
s51、按照每个边界框的y坐标进行冒泡排序,遍历整个列表,判断需要换行的位置。
[0022]
s52、确定了换行的位置之后,在行内按照边界框的x坐标同样进行冒泡排序,以此形成一个二维数组;并且在此遍历过程中统计检测结果总数,每行的起始坐标,所有边界框总宽度、总高度与两个边界框之间的总间隔,以此获得每行的平均起始坐标、边界框的平均宽度、平均高度与平均间隔。
[0023]
s53、最后再遍历一遍,与第一次遍历使用相同的条件判断换行的位置,根据继电保护屏柜每行硬压板都是9个的原则,判断行内的硬压板数是否足够9个,足够则不需补全,不足则进行补全。
[0024]
s54、补全时,首先根据行平均起始坐标与该行首坐标的差值,判断是否需要补全;对该差值与边界框平均宽度的商进行下取整,判断需要补全的个数;并从该行目前行首的位置,从后往前进行补全;然后根据行内边界框之间的差值,判断行内是否需要补全;最后,
如果行首与行内都经过补全后,该行边界框数仍不足9个,则从该行目前的行末位置向后进行补全。
[0025]
步骤6:误检判定与便捷更正。
[0026]
当模型的识别结果与基准文件不一致时,判断其为误检。
[0027]
当是模型的识别结果时,用户需先对识别结果更改,然后将当前拍摄的图片进行标记,之后这类图片与更正后的结果添加到模型训练集中,使用这类图片不断对模型进行训练,提高模型的泛化性;当是基准文件时,用户需对基准标记,这类基准之后会由人工再核对修改;在每次巡检工作完成后,所有工作数据会传回服务器,在服务器端完成后续的模型训练与基准核对工作。
[0028]
进一步的,步骤2中的归一化和预处理具体为:
[0029]
s21、将原图归一化为416
×
416的大小。
[0030]
s22、随机缩小图片并且进行长和宽的扭曲;缩小程度为区间[0.8,1]内的随机数,扭曲程度为[0.5,1.5]内的随机数。
[0031]
s23、将缩小后的剩余部分用黑色填充,保证图片大小为416
×
416。
[0032]
s24、按50%的概率翻转图像。
[0033]
s25、按50%的概率进行高斯模糊处理。
[0034]
s26、在hsv颜色空间中进行色域扭曲;hue在区间(-hue,hue)内随机进行逆时针或顺时针旋转,saturation与value首先在100以内的正数中取随机数,然后按50%的概率取倒数。
[0035]
进一步的,步骤4中的通过dnn模块实现模型调用的具体过程如下:
[0036]
s41、装载opencv库文件。
[0037]
s42、使用dnn模块加载网络配置与训练权重的文件,构建模型网络。
[0038]
s43、读入图片并转换为模型可用的bolb标准输入格式。
[0039]
s44、将转换后的图片输入网络,得到yolo的输出层,通过前向传播,得到检测结果列表。
[0040]
s45、循环遍历检测结果列表,过滤掉小于阈值的检测结果,得到一一对应的边界框列表、类别列表、置信度列表。
[0041]
s46、进行非极大值抑制,减少重叠的边界框数目。
[0042]
s47、描绘边界框,保存结果图片。
[0043]
进一步的,步骤s51中判断需要换行的位置,判断标准有三条:
[0044]
a、下一个框的左上角y坐标比上一个框的右下角y坐标大。
[0045]
b、如果两行的边界框有重叠,下一个框的左上角y坐标比上一个框的右下角y坐标小。
[0046]
c、下一个框左上角的y坐标比上一个框的左上角y坐标大一个框的高度的值。
[0047]
进一步的,步骤6中的模型训练的配置为:输入网络的图片尺寸为416
×
416,初始学习率为0.00261,总迭代次数为6000,分别在第4800次与5400次迭代时,将学习率降低1/10。
[0048]
本发明的有益技术效果为:
[0049]
1)充分考虑到电力工作中对安全性与可靠性的要求,克服了发明专利公开号(cn)
为 113794277a的发明中存在的准确度不足缺陷,针对保护硬压板的模型训练数据问题,设计实现了更加合适的数据增强算法,进一步提高了模型的泛化性,提升模型的检测精确度。
[0050]
2)考虑到现场工作过程中,在使用移动终端进行拍摄时,由于保护屏柜的玻璃柜门存在反光现象,以及相机成像的边缘畸变等问题,研究并实现了对模型预测后的数据进行漏检与误检的判定,并达到了漏检硬压板的自动补全,以及对误检硬压板的便捷更正的效果,克服了发明专利公开号(cn)为113794277a与113255827a等深度学习检测方法中无法避免的漏检与误检现象。
[0051]
基于以上原因,结合目前移动智能设备的广泛普及,本发明对保护屏柜无需进行额外的改造,解决以往发明中出现漏检错检等问题,拥有更高的普适性和鲁棒性。
附图说明
[0052]
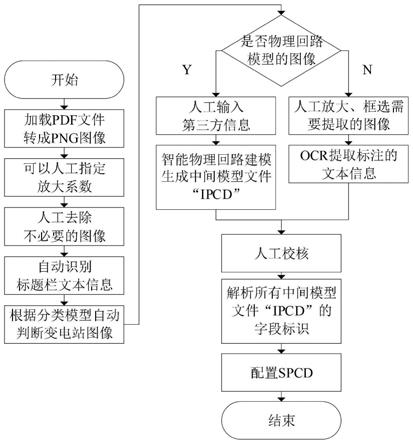
图1为本发明智能变电站继电保护硬压板校核方法技术流程图。
[0053]
图2为本发明基准文件示例图。
[0054]
图3为漏检补全功能展示图(a为补全前、b为补全后)。
[0055]
图4为误检情况展示图。
[0056]
图5为模型训练过程展示图(a为avg loss曲线图、b为训练结果图)。
[0057]
图6为场景模拟展示图(a为初始状态、b为中间状态、c为最终状态)。
具体实施方式
[0058]
下面结合附图和具体实施方法对本发明做进一步详细说明。
[0059]
本发明的一种基于目标检测模型的智能变电站继电保护硬压板校核方法流程如图1所示,工作人员需要先根据本人的工号下载本次的工作任务对应的基准文件,然后就可以开始巡检工作了。在巡检的过程中,对每个屏柜需要先扫描其二维码,将扫描结果用于与基准文件建立联系。在完成拍照后,yolov4-tiny模型的调用与基准文件的解析将同步进行,并最终展示给工作人员校核后的结果。此时,若没有漏检与误检情况的发生,工作人员便可直接保存本次记录到本地;若发生漏检或误检现象,工作人员需对相应的硬压板进行更正即可,而并不需重复之前的步骤。当此屏柜的工作记录保存完成后,工作人员即可前往下一个屏柜,当所有屏柜都巡检完毕后,可到网络畅通地区再将本次工作的所有数据上传回服务器。
[0060]
本发明的一种基于目标检测模型的智能变电站继电保护硬压板校核方法具体为:
[0061]
1、数据采集
[0062]
因为考虑到巡检人员的实际工作场景,以尽可能复现实际环境为原则,将在现场采集的硬压板图片,用于制作数据集。具体复现场景如下:
[0063]
拍摄角度:在手机与屏柜保持相对平行的状态下拍摄一组图片,因为这样的图片更易于辨识。但是在拍摄过程中,因为硬压板区域的高度不一,这样做需要用户经常下蹲来完成拍摄,然而这样会大大降低用户体验。所以在硬压板与硬压板之间没有覆盖与遮挡的前提下,以不下蹲的姿势再拍摄一组图片。
[0064]
光照问题:起初分别在自然光与灯光下分别拍摄了一组图片,但是这样两种情况下都存在反光的问题。在不断的尝试中,发现使用手机的闪光灯拍摄时,可以大大降低反光
程度,于是又使用闪光点拍摄了一组图片。
[0065]
图片采集完成后,使用labelimg工具对拍摄图片进行标注,标注的标签有两种:0(绿色框)和1(橙色框),分别代表“投”与“退”两种类别。
[0066]
2、数据增强
[0067]
在深度学习中数据集是十分重要的,没有足够的数据集作为支撑,模型很容易出现过拟合的问题。换句话说,如果数据集不足时,模型很可能会学习到很多不必要的特征。比如在识别一个电脑的时候,模型可能会这样认为:一个物体不仅要拥有电脑的外形,而且必须在某种特定角度、特定亮度下,该物体才是一个电脑。很明显这样认为是很片面的,而数据增强可以使数据集变的丰富多样,使模型达到“见多识广”的目的。
[0068]
数据增强具体为:
[0069]
(1)将原图归一化为416
×
416的大小。
[0070]
(2)随机缩小图片并且进行长和宽的扭曲;缩小程度为区间[0.8,1]内的随机数,扭曲程度为[0.5,1.5]内的随机数。
[0071]
(3)将缩小后的剩余部分用黑色填充,保证图片大小为416
×
416。
[0072]
(4)按50%的概率翻转图像。
[0073]
(5)按50%的概率进行高斯模糊处理。
[0074]
(6)在hsv颜色空间中进行色域扭曲;hue在区间(-hue,hue)内随机进行逆时针或顺时针旋转,saturation与value首先在100以内的正数中取随机数,然后按50%的概率取倒数。
[0075]
3、基准文件设计与解析
[0076]
巡检工作一般是两个人配合完成的,会有一人专门负责将基准文档与现场的保护硬压板投退状态依次进行复核。文章为了降低其繁琐程度,并节省人力资源,将基准文件转化为xml 文件,实现无纸化操作。保护硬压板的运行基准可以通过解析xml文件来获取,将之与模型预测结果比对,即可完成巡检校核工作。
[0077]
基准文件的xml格式如图2所示,其包括了变电站名称、保护装置名称、保护装置身份识别码、硬压板名称、正常运行状态等信息。其中pad标签中的x和y,表示第x行第y 列的硬压板,没有的位置为备用硬压板。
[0078]
基准文件在每次工作前需从服务器端下载,因为在整个巡检工作过程中所有操作都是离线完成的。解析基准文件是通过dom解析器实现的。dom解析的本质是通过将数据组装成一颗“树”,然后通过节点与节点之间的关系来解析xml文件,解析难度并不高,只是比较繁琐。
[0079]
4、模型的内置与调用
[0080]
android系统的资源文件大致分为两种:res目录下的可编译资源文件与assets目录下的原生资源文件。assets文件夹下的文件不会像xml、java文件一样被预编译,而是始终都保持原始的文件格式,所以文章选择将模型的训练文件(包括权重文件与配置文件等)内置在 assets文件夹中。除此之外,在模型的调用过程中需要用到训练文件的绝对路径,但是assets 文件夹中的文件是无法获取绝对路径的。因此文章采取了预加载的策略:当app初次启动时,需先将训练文件通过字节流的方法加载到与app同名下的缓存文件夹中,以此来获取训练文件的绝对路径。
[0081]
模型内置完成之后,文章选择使用opencv的dnn模块调用模型,并且opencv的版本为3.4.11(为了保证opencv对yolov4系列的良好支持,经测试其版本不能低于3.4.11)。在调用前需先以module的方式,将opencv添加到项目中。再复制opencv库文件到jnilibs 文件夹下。通过dnn模块实现模型调用的具体过程如下:
[0082]
(1)装载opencv库文件;
[0083]
(2)使用dnn模块加载网络配置与训练权重的文件,构建模型网络;
[0084]
(3)读入图片并转换为模型可用的bolb标准输入格式;
[0085]
(4)将转换后的图片输入网络,得到yolo的输出层,通过前向传播,得到检测结果列表;
[0086]
(5)循环遍历检测结果列表,过滤掉小于阈值的检测结果,得到一一对应的边界框列表、类别列表、置信度列表;
[0087]
(6)进行非极大值抑制,减少重叠的边界框数目;
[0088]
(7)描绘边界框,保存结果图片。
[0089]
5、漏检判定与自动补全
[0090]
在实际测试过程中,由于反光、遮挡等因素,仍发生过漏检的情况,此时就需要后期通过代码补全。
[0091]
模型预测时会先预测出目标区域,即图3(a)中的每个方框(在目前检测中通常称之为边界框)内的区域,接着会对目标区域的目标类别做出预测,在图中表现为矩形代表“断开”,圆形代表“闭合”。在预测完成后,可以获取到边界框每个顶点的坐标和边界框中目标的类别,但是得到是无序的边界框,还需要根据其坐标再判断是否漏检。经过不断的测试和改进,目前的漏检补全功能是这样实现的:
[0092]
首先按照每个边界框的y坐标进行冒泡排序,这样同一行的检测结果就会挨在一起;
[0093]
然后遍历整个列表,判断需要换行的位置,判断标准有三条,三者是“或”的关系:
[0094]
(1)下一个框的左上角y坐标比上一个框的右下角y坐标大;
[0095]
(2)如果两行的边界框有重叠(由于拍摄角度倾角过大引起),下一个框的左上角y坐标比上一个框的右下角y坐标小,但是这个值不会太大,暂定小于一个定值;
[0096]
(3)再或就是可能有比较特殊的情况,就判断下一个框左上角的y坐标比上一个框的左上角y坐标大一个框的高度的值,但是因为框高度不是定值,这个暂定为平均框高度的3/4。
[0097]
确定了换行的位置之后,在行内按照边界框的x坐标同样进行冒泡排序,以此形成一个二维数组。并且在此遍历过程中统计检测结果总数,每行的起始坐标,所有边界框总宽度、总高度与两个边界框之间的总间隔,以此获得每行的平均起始坐标、边界框的平均宽度、平均高度与平均间隔;
[0098]
最后再遍历一遍,与第一次遍历使用相同的条件判断换行的位置,根据继电保护屏柜每行硬压板都是9个的原则,判断行内的硬压板数是否足够9个,足够则不需补全,不足则进行补全。
[0099]
补全时,首先根据行平均起始坐标与该行首坐标的差值,判断是否需要补全。对该差值与边界框平均宽度的商进行下取整,判断需要补全的个数。并从该行目前行首的位置,
从后往前进行补全。然后根据行内边界框之间的差值,判断行内是否需要补全。最后,如果行首与行内都经过补全后,该行边界框数仍不足9个,则从该行目前的行末位置向后进行补全。
[0100]
补全时边界框的画法是:首先将起点x坐标加上平均间隔作为第一个边界框的起点x坐标;该起点坐标加上平均宽度作为终点x坐标;将起点y坐标为第一个边界框起点y坐标;将起点y坐标加上平均高度作为终点y坐标;这样就得到了一个完整的边界框。剩余边界框的画法同理。图3(b)是补全的效果图,使用photoshop模仿反光的情形
[0101]
6、误检判定与便捷更正
[0102]
误检即模型识别错误,但是模型自己并不能判断自己是否识别错误,所以需要有与之对比的数据,即硬压板基准。当模型的识别结果与基准不一致时,程序判断其为误检。
[0103]
因此造成误检的原因有两种——模型识别出错与基准文件出错。当是前者时,用户需先对识别结果更改,然后将当前拍摄的图片进行标记,之后这类图片与更正后的结果会添加到模型训练集中,使用这类图片不断对模型进行训练,提过模型的泛化性。当是后者时,用户需对基准标记,这类基准之后会由人工再核对修改。在每次巡检工作完成后,所有工作数据会传回服务器,在服务器端完成后续的模型训练与基准核对工作。
[0104]
至此,在图中的“框”有三种,分别是模型正确识别的框、漏检后补全的框与误检的框,分别用三种颜色绿色、蓝色与红色表区分这三种来源。用户需要补全与误检的框。
[0105]
在图4中,漏检复现方式与上一节相同。但是目前模型精度较高,识别出错的情况很难复现,在此处对基准文件做出错误的更改,以达到相同的误检效果。
[0106]
在更正时,用户点击屏幕中边界框中的任意位置,app就会弹出提示框,展示当前选中框的硬压板投退状态,并提供更改选项。该功能的实现需要重写android触摸事件——ontouch 方法,首先在该方法中可以很方便的获取到用户点击的屏幕坐标,然后调用imageview控件 (用来展示硬压板图片的控件)的getimagematrix方法获取图片矩阵,再求其逆矩阵,通过逆矩阵的映射,就可得到屏幕坐标转化后在图片中的实际坐标,进而可以判断该位置在哪个边界框内部,然后弹出提示框让用户选择需变更的状态,最后根据提示框返回的用户选择结果,调用opencv对边界框进行重绘,这样就完成一次误检更正。当所有边界框更正完毕后,其他颜色就都被“消灭”了,这种通过颜色区分的方式,可以很大程度上缓解视觉疲劳。
[0107]
7、模型训练
[0108]
训练模型使用的机器配置如下:
[0109]
系统:windows10;
[0110]
cpu:core
tm
i7-9700k;
[0111]
gpu:nvidia rtx 2080 super.
[0112]
模型训练的超参数配置如表1所示:
[0113]
表1训练中参数表
[0114][0115]
输入网络的图片尺寸为416
×
416,初始学习率为0.00261,总迭代次数为6000,分别在第4800次与5400次迭代时,将学习率降低1/10。训练过程中模型的平均损失(avg loss)变化趋势如图5(a)所示,最终的avg loss小于1,为0.6771。如图5(b)所示模型的map达到99.44%。
[0116]
表2模型性能对比表
[0117][0118]
表2将文章模型与文献[16]使用的ssd目标检测模型,以及文献[17]使用的改进的ssd 算法模型进行了详细对比。而文献[18]使用的yolov3目标检测模型,其作者只给出模型识别率为98.95%,并没有给出识别率的定义与计算方法,也没有给出其他指标,所以表2没有进行对比。并且文章之前使用过yolov3,并经过测试yolov3模型的精度只有95.45%。
[0119]
训练完成后,使用三星note9智能手机(cpu为高通骁龙845,运行内存6gb,总体性能属于中端机队列)进行了实际的测试。文章在测试集中随机选择了25张图片,yolov4-tiny 的识别准确率为98.64%,识别速度在1s左右。表3是yolov4-tiny模型测试结果的详细信息。
[0120]
表3手机测试表
[0121][0122]
8、工作环境模拟展示
[0123]
假设拍摄图片在第一行第四列的硬压板处有强烈的反光,以至于在此处模型识别不出硬压板,发生漏检现象;同样修改基准文件模拟误检现象。则初始状态如图6(a)所示,第一行第四列边界框(因为附图中彩色已转为黑色,因此特意指明了边界框的具体位置)为蓝色,为补全边界框;第一行第五列的边界框为红色,为误检边界框。分别点击蓝色框与红色框的位置,app将弹出提示框,如图6(b)所示。提示框将显示点击位置以及该位置硬压板的当前状态,并提供更改选项。当用户选择的变更状态与当前状态不同时,边界框将重绘,如图 6(c)所示,两处边界框的形状发生改变,颜色变为绿色。
[0124]
经过修改后所有边界框都变为绿色,这样就可以保存用户对该屏柜的操作结果了。
[0125]
使用不同颜色的边界框来区分不同的情况,有助于提高辨识度,而且操作十分简单,既有助于降低事故率,又可以大大提高工作效率。
[0126]
本发明将yolov4-tiny模型应用到移动智能终端,在opencv的支持下完成对保护硬压板的状态辨识,设计并使用xml格式的基准文件,将其解析后与模型预测结果比对,再辅助漏检补全与误检更正策略,使移动终端可以代替人工完成巡检工作。
[0127]
由于保护硬压板主要有压紧式和插拔式两种类型,并且其结构都比较简单,投退状态也相对易于辨识,所以文章基于轻量、快速的yolov4-tiny目标检测模型,提出一种新的继电保护硬压板智能校核技术。
[0128]
本发明的模型均值平均精度(mean average precision,map)达到了99.44%,精
确率、召回率和f1分数均为0.98。在opencv的支持下,可以在移动端完成对保护硬压板的状态辨识和巡检校核工作。尽管模型精度已经达到了很高的标准,但是在实际测试过程中,仍然不可避免模型的漏检与误检。因此,本发明实现了对漏检硬压板的自动补全(简称漏检补全),用户可通过点击移动设备的屏幕直接更正误检硬压板(简称误检更正),辅助以这两种策略,实现用户只需一次拍摄,即可完成对一个保护屏柜的巡检工作,这将极大提高工作效率,移动端的保护硬压板数据易于跨平台使用,可以有效提高继电保护的智能运维水平。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。