1.本技术属于半导体加工技术领域,具体涉及一种激光传感器位置调整装置。
背景技术:
2.在半导体行业中,晶圆在工艺腔的取传输送都通过升降机构配合顶针机构来实现,顶针机构的限位能大大提高放片和取片的定位精度。
3.晶片输送过程中,由于控制等方面的原因,可能会发生传送错误的现象,从而无法保证晶片能正确传送到反应腔室内部的载片台上,这将严重影响后续工艺。并且如果晶片传送不成功,则晶片实际仍处于机械手上,当工艺过程结束后,自动取回晶片时,会发生晶片碰撞顶针的事故,影响设备正常运转。因此,需要对预抽真空室传输腔的机械手的晶片位置进行检测,判断晶片传送是否成功。
4.现有技术中,检测晶片是否输送成功的常用手段为使用激光传感器进行检测,通过激光有无反射判断晶片是否位于机械手上。该方法简单、便捷。但是由于激光传感器对反射光线很敏感,长时间使用后容易出现信号错误,需定期调整激光传感器的位置,从而保证信号反馈的准确性。
5.但激光传感器在支架上的位置为固定的,无调节功能,受激光传感器的固定角度影响,对激光传感器射出的光线的角度影响较大,导致晶圆侦测的可靠性以及通用性较差。
技术实现要素:
6.为解决上述技术问题,本技术提供一种激光传感器位置调整装置,旨在至少能够在一定程度上改善晶圆侦测的可靠性以及通用性。
7.本技术的技术方案为:
8.一种激光传感器位置调整装置,用于激光传感器的位置调整,其特殊之处在于,所述位置调整装置包括:
9.载体;
10.第一连接件,所述第一连接件包括固定连接的第一连接板以及第二连接板,所述第一连接板沿第一方向设置,所述第一连接板可沿第一方向移动地连接在所述载体上,所述第二连接板沿第二方向设置,所述第二方向和所述第一方向垂直;
11.第二连接件,所述第二连接件包括固定连接的第三连接板以及第四连接板,所述第三连接板可绕第一转轴摆动并锁定地连接在所述第二连接板上,所述第一转轴沿第一方向设置,所述第四连接板沿第三方向设置,所述第三方向均和所述第一方向以及所述第二方向垂直,所述激光传感器可绕第二转轴摆动并锁定地连接在所述第四连接板上,所述第二转轴沿第二方向设置。
12.在一些实施方案中,所述第一连接板设置有两个以上的腰形孔,所述腰形孔的长度方向沿第一方向设置,所述第一连接板通过和所述腰形孔相配合的第一连接件连接在所述载体上。
13.在一些实施方案中,所述第二连接板上设置有第一连接孔以及第二连接孔,所述第一连接孔以及所述第二连接孔的中心轴均沿第一方向设置;
14.所述第三连接板上设置有第三连接孔以及第一弧形孔,所述第三连接孔的中心轴沿第一方向设置,所述第一转轴的两端分别连接在所述第一连接孔以及所述第三连接孔中,以使所述第三连接板可摆动地连接在所述第二连接板上;
15.所述第一弧形孔的圆心位于所述第三连接孔的中心轴上,第二连接件的两端分别连接在所述第二连接孔以及所述第一弧形孔中,所述第三连接板通过所述第二连接件可锁定在所述第二连接板上。
16.在一些实施方案中,所述第一弧形孔设置在所述第三连接孔的第二方向的一侧,所述第一弧形孔的中部和所述第三连接孔的中心轴位于第二方向上。
17.作为本技术的优选方案,所述第一弧形孔的圆心角为20
°
。
18.在一些实施方案中,所述第四连接板上设置有第四连接孔以及第二弧形孔,其中:
19.所述第四连接孔的中心轴沿第二方向设置,所述激光传感器通过和所述第四连接孔相配合的所述第二转轴可摆动连接在所述第四连接板上;
20.所述第二弧形孔的圆心位于所述第四连接孔的中心轴上,第三连接件的两端分别连接在所述第四连接孔以及所述激光传感器上,所述激光传感器通过所述第三连接件可锁定在所述第四连接板上。
21.在一些实施方案中,所述第二弧形孔设置在所述第四连接孔的第一方向的一侧。
22.在一些实施方案中,所述第二弧形孔从所述第四连接板的周面侧部向所述第四连接板的内部延伸。
23.作为本技术的优选方案,所述第二弧形孔的圆心角为25
°
。
24.作为本技术的优选方案,所述第一方向为水平横向方向,所述第二方向为水平纵向方向,所述第三方向为竖向方向。
25.本技术的有益效果至少包括:
26.本技术所提供的一种激光传感器位置调整装置,由于该位置调整装置的第一连接件的第一连接板可沿第一方向移动地连接在载体上,第二连接件的第三连接板可绕第一转轴摆动并锁定地连接在所述第二连接板上,第一转轴沿第一方向设置,激光传感器可绕第二转轴摆动并锁定地连接在第二连接件的第四连接板上,第二转轴沿第二方向设置,因此,可调整激光传感器在载体上的安装位置,使激光传感器的使用角度可调,提高晶圆侦测的可靠性以及通用性,具有很好的实用价值。
附图说明
27.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
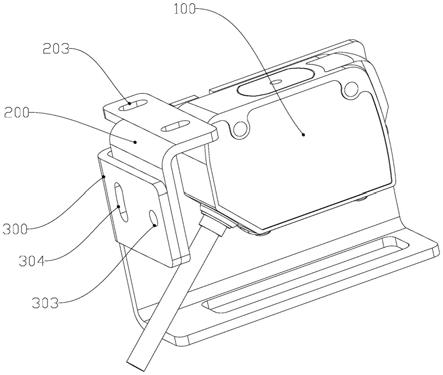
28.图1为本技术实施例的一种激光传感器位置调整装置的结构示意图;
29.图2为图1所示的一种激光传感器位置调整装置的另一角度的结构示意图;
30.图3为图1中的第一连接件的结构示意图;
31.图4为图1中的第二连接件的结构示意图。
32.附图中:
33.100-激光传感器,200-第一连接件,201-第一连接板,202-第二连接板,203-腰形孔,204-第一连接孔,205-第二连接孔,300-第二连接件,301-第三连接板,302-第四连接板,303-第三连接孔,304-第一弧形孔,305-第四连接孔,306-第二弧形孔。
具体实施方式
34.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
35.需要说明的是,本技术实施例中所有方向性指示仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.下文的公开提供了许多不同的实施例或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施例和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
37.本技术实施例提供了一种激光传感器位置调整装置,旨在至少能够在一定程度上改善晶圆侦测的可靠性以及通用性。
38.图1为本技术实施例的一种激光传感器位置调整装置的结构示意图,图2为图1所示的一种激光传感器位置调整装置的另一角度的结构示意图。结合图1以及图2,该位置调整装置用于激光传感器100的位置调整,该位置调整装置用包括载体(图中未画出)、第一连接件200以及第一连接件300。
39.图3为图1中的第一连接件的结构示意图。结合图1以及图3,本技术实施例中,第一连接件200包括固定连接的第一连接板201以及第二连接板202,第一连接板201沿第一方向设置,第一连接板201可沿第一方向移动地连接在载体上,第二连接板202沿第二方向设置,第二方向和第一方向垂直。
40.结合图1以及图3,本技术实施例中,第一连接板201上设置有两个以上的腰形孔203,腰形孔203的长度方向沿第一方向设置,第一连接板201通过和腰形孔203相配合的第一连接件(图中未画出)连接在载体上。通过调整第一连接件在对应的腰形孔203上的位置,即可调整第一连接板201在载体上的第一方向的位置。
41.需要说明的是,本技术实施例中,构成第一连接件200的第一连接板201以及第二连接板202可一体成型,而第一连接件可选用连接螺钉。
42.图4为图1中的第二连接件的结构示意图,结合图1、图3以及图4,本技术实施例的第二连接件300包括固定连接的第三连接板301以及第四连接板302,第三连接板301可绕第一转轴(图中未画出)摆动并锁定地连接在第二连接板202上,第一转轴沿第一方向设置,第
四连接板302沿第三方向设置,第三方向均和第一方向以及第二方向垂直,激光传感器100可绕第二转轴(图中未画出)摆动并锁定地连接在第四连接板302上,第二转轴沿第二方向设置。
43.结合图1-图3,本技术实施例中,第二连接板202上设置有第一连接孔204以及第二连接孔205,第一连接孔204以及第二连接孔205的中心轴均沿第一方向设置,而第三连接板301上设置有第三连接孔303以及第一弧形孔304,第三连接孔303的中心轴沿第一方向设置,第一转轴的两端分别连接在第一连接孔204以及第三连接孔303中,通过第一转轴的设置,可使第三连接板301可摆动地连接在第二连接板202上。
44.结合图1以及图4,本技术实施例的第一弧形孔304的圆心位于第三连接孔的中心轴上,第二连接件(图中未画出)的两端分别连接在第二连接孔205以及第一弧形孔304中,第三连接板301通过第二连接件可锁定在第二连接板202上。这样,通过第三连接件301绕第一转轴在第二连接板202上的摆动到位后,再通过第二连接件使第三连接板301锁定在第二连接板202上,即可调整第二连接件300在载体上第一弧形孔304方向上的位置。
45.结合图1以及图4,本技术实施例中,第一弧形孔304设置在第三连接孔303的第二方向的一侧,第一弧形孔304的中部和第三连接孔303的中心轴位于第二方向上,即第一弧形孔304方向为第二方向和第三方向的结合,该第三方向均和第一方向以及第二方向垂直,进而达到调整第二连接件300在载体上的第二方向和第三方向的位置。
46.作为本技术实施例的优选方案,第一弧形孔304的圆心角为20
°
,可调节第三连接件固定在第一连接件的距离。
47.结合图2以及图4,本技术实施例的第四连接板302上设置有第四连接孔305以及第二弧形孔306,第四连接孔305的中心轴沿第二方向设置,激光传感器100通过和第四连接孔305相配合的第二转轴(图中未画出)可摆动连接在第四连接板302上,第二弧形孔306的圆心位于第四连接孔305的中心轴上,第三连接件(图中未画出)的两端分别连接在第四连接孔305以及激光传感器100上,激光传感器100通过第三连接件可锁定在第四连接板302上。这样,通过激光传感器100绕第二转轴在第四连接板302上的摆动到位后,再通过第三连接件使激光传感器100锁定在第四连接板302上,即可调整激光传感器100在载体上第二弧形孔306方向上的位置。
48.结合图2以及图4,本技术实施例中,第二弧形孔306设置在第四连接孔305的第一方向的一侧,即第二弧形孔306方向为第一方向和第三方向的结合,进而达到调整激光传感器100在载体上的第一方向和第三方向的位置。
49.结合图2以及图4,本技术实施例中,第二弧形孔306从第四连接板302的周面侧部向第四连接板302的内部延伸,即第二弧形孔306的一端为敞口式结构,这样的好处在于:使固定在第三连接件上的激光传感器100的位置具备可大角度调节的能力来适配侦测晶圆的角度的要求。
50.作为本技术的优选方案,第二弧形孔306的圆心角为25
°
,来适配侦测不同类型晶圆的位置要求。
51.需要说明的是,本技术实施例中,构成第二连接件300的第三连接板301以及第四连接板302可一体成型,而第二连接件以及第三连接件均可选用连接螺钉。
52.另外,本技术实施例中,该激光传感器位置调整装置的各个构件可选钣金制成,以
降低成本。
53.具体应用时,第一方向可以为水平横向方向,第二方向为水平纵向方向,第三方向为竖向方向,即通过第一连接件200在载体上的位置可调整激光传感器100的水平横向的位置,通过第二连接件300在第一连接件200上的位置可调整激光传感器100的水平纵向和竖向的位置,通过激光传感器100在第二连接件300上的位置可调整激光传感器100的水平横向和竖向的位置,达到多角度位置调整的目的。
54.综上所述,本技术所提供的一种激光传感器位置调整装置,由于该位置调整装置的第一连接件的第一连接板可沿第一方向移动地连接在载体上,第二连接件的第三连接板可绕第一转轴摆动并锁定地连接在第二连接板上,第一转轴沿第一方向设置,激光传感器可绕第二转轴摆动并锁定地连接在第二连接件的第四连接板上,第二转轴沿第二方向设置,因此,可调整激光传感器在载体上的安装位置,使激光传感器的使用角度可调,提高晶圆侦测的可靠性以及通用性,具有很好的实用价值。
1.尽管已描述了本技术的优选实施例,但本领域内的普通技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
2.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。