一种基于pynq的无人机识别系统及识别方法
技术领域
1.本发明涉及无线通信物理层安全技术,具体是一种基于pynq的无人机识别系统及识别方法。
背景技术:
2.随着无人机产业逐渐变得廉价化、玩具化及大众化,这使得在很多大型活动中我们经常会看到并未备案或受到许可的无人机飞行。这些无人机一旦失控坠毁,会造成很大的人员伤亡和财产损失,对于民航班机正常飞行也会造成极大干扰,还可能产生一些恶意事件。
3.为消除黑飞无人机带来的安全隐患,需要强大高效的方法识别管理这些黑飞无人机。由于无线介质的开放性,传统的基于安全协议的无人机识别方式存在隐患。基于物理层的射频指纹识别,具有特征难以伪造的优点,能有效正确识别无人机的身份。
4.射频指纹是指信号发送设备其内部电子元器件生产过程的容差导致设备之间存在硬件上的细微差异,这些硬件差异致使发射信号相较于理想信号有某些细微变化,这些细微变化不影响设备间正常通信,但却赋予了每个信号独一无二的指纹特征。
5.三阶累积量是一种对信号时域上的统计量描述。在一个非高斯性的待观测信号,与加性有色噪声相叠加时,叠加信号的三阶累积量等于待观测信号的三阶累积量。所以三阶累积量作为射频指纹特征时,可以有效消除噪声带来的影响。
6.目前基于深度学习技术的射频指纹识别方法主要是使用卷积神经网络或者其变体。大多数卷积神经网络基本上都是在gpu环境下运行的。gpu虽然可以实现实时处理,但其高功耗和高成本使其难以满足一些低功耗和低成本的嵌入式场景的应用要求。因此能够研究出一套速度快、准确度高以及功耗低的射频指纹识别系统具有重要的实际意义。
技术实现要素:
7.本发明的目的是针对现有技术的不足,而提供一种基于pynq的无人机识别系统及识别方法。这种系统可以实时识别无人机身份并认证,这种方法识别精度高。
8.实现本发明目的的技术方案是:
9.一种基于pynq的无人机识别系统,包括pynq-z2和与pynq-z2连接的信号接收装置、液晶显示器lcd及sd卡,pynq-z2与信号接收装置采用双绞线连接,所述pynq-z2为基于双核cortex-a9处理器的fpga开发板,fpga开发板设有apsoc芯片、axi数据传输总线、ddr3内存控制器、rj45接口、hdmi out接口、sd card接口,ddr3内存控制器与aspsoc芯片和sd card接口连接、aspsoc芯片与rj45接口和hdmi out接口连接、rj45接口与双绞线连接、hdmi out接口和hdmi线连接、sd card接口和sd卡连接,其中,apsoc芯片设有可编程逻辑pl端和处理系统ps端,处理系统ps端与ddr3内存控制器连接,axi数据传输总线连接可编程逻辑pl端和处理系统ps端,所述可编程逻辑pl端设有数据传输模块、预处理ip核、神经网络加速ip核和hdmi高清显示模块,数据传输模块和axi数据传输总线连接,用于无人机信号流数据的
存取;预处理ip核和axi数据传输总线连接,用于将接收到的信号提取有效部分,并生成三阶累积量的并行加速计算;神经网络加速ip核和axi数据传输总线连接,用于对神经网络的并行加速计算;hdmi高清显示模块和hdmi out接口连接,用于输出无人机识别结果,所述处理系统ps端设有无人机信号预处理模块和无人机信号识别模块。所述信号接收装置用于采集无人机信号。
10.所述液晶显示器lcd用于显示无人机识别结果。
11.所述双绞线用于信号接收装置与pynq-z2的数据传输。
12.所述sd卡用于存储pynq-z2的操作系统、无人机识别的数据模型以及可执行代码。
13.一种基于pynq的无人机识别方法,包括上述的基于pynq的无人机识别系统,所述方法包括如下步骤:
14.1)信号的接收和预处理:采用信号接收装置接收无人机的控制信号,信号接收装置通过rj45接口将信号传输至pynq的ddr里,再经过axi数据传输总线传送至pynq的可编程逻辑pl端,在可编程逻辑pl端内采用预处理ip核,通过自适应阈值法,计算只包含噪声信号的无效区域信号的平均功率,和计算有效区域信号的平均功率,其中有效区域信号包含了噪声信号及无人机的信号;再通过将有效区域信号的平均功率值作为功率阈值,低于该阈值的信号视为无效区域信号而去除,留下有效区域信号;
15.2)信号的射频指纹特征提取:采用步骤1)所述方法,分别采集每一个待识别无人机的有效区域信号,将有效区域信号进行功率归一化,以避免不同无人机信号功率不同的干扰,采用间接估计法计算出每一个待识别无人机信号的三阶累积量并储存在ddr中;
16.3)训练用于信号识别的神经网络:采用tensorflow平台构建一个卷积神经网络,卷积神经网络设有:输入层、卷积层、池化层、全连接层、输出层,输入层用于输入待识别信号的三阶累积量,输出层用于输出无人机的识别结果,采用步骤2)的方法将x个待识别无人机的x类三阶累积量作为训练集,训练出神经网络;
17.4)信号的分类识别:将在步骤3)中训练好的神经网络导入到sd卡中,再从sd卡读取到ddr中,将待识别的射频指纹特征送入到训练好的神经网络,启动神经网络加速ip核进行计算,循环执行该神经网络中的卷积层、池化层和全连接层的正向推导计算,获得信号识别结果,计算后把结果写回ddr;
18.5)将步骤4)中获得的信号识别结果通过hdmi高清显示模块输出到液晶显示器lcd上。
19.步骤2)中所述的三阶累积量为采用间接估计法计算,过程如下:
20.3-1)将原信号中n个数据分为k段,每段含m个样本;
21.3-2)设x
(k)
(0),x
(k)
(1),......,x
(k)
(m-1)为第k段数据,其中k=1,...,k,计算各段的三阶累积量的估计值:
[0022][0023]
3-3)取所有段的三阶累积量的平均值作为整个观测数据组的三阶累积量估计,即
[0024]
[0025]
其中,公式(1)、(2)中i、j为信号的延迟量,i=-m,...,m,j=-m,...,m,公式(1)中m1为0、-i、-j三者中的最大值,公式(1)中m2为m-1、m-1-i、m-1-j三者中的最小值。
[0026]
与现有技术相比,本技术方案的有益效果为:
[0027]
1)本技术方案基于无人机的射频指纹特征进行无人机的身份识别,该方法不同于现有的针对无人机的身份认证算法,具有不需要获得无人机射频信号的先验知识和适用性强的特点;
[0028]
2)本技术方案采用三阶累积量作为射频指纹特征,剔除了容易受到噪声信号影响的部分,具有较好的稳定性,可以在复杂信道条件下对无人机进行稳定的身份识别;
[0029]
3)本技术方案采用轻量级的神经网络,在保证识别率的条件下,降低模型的计算量,在信噪比大于20db时,识别率大于90%;
[0030]
4)本技术方案采用pynq-z2芯片中fpga部分的并行处理能力,使得本系统能够在较短时间间隔内识别出无人机身份,具有较高的实用价值;
[0031]
5)本技术方案实现较为小型化的无人机检测系统,系统总的功耗性较低、便携性较高,适用于绝大多数的应用场景;
[0032]
6)本技术方案的硬件价格相较于pc机具有明显的优势。
[0033]
这种系统可以实时识别无人机身份并认证,这种方法识别精度高。
附图说明
[0034]
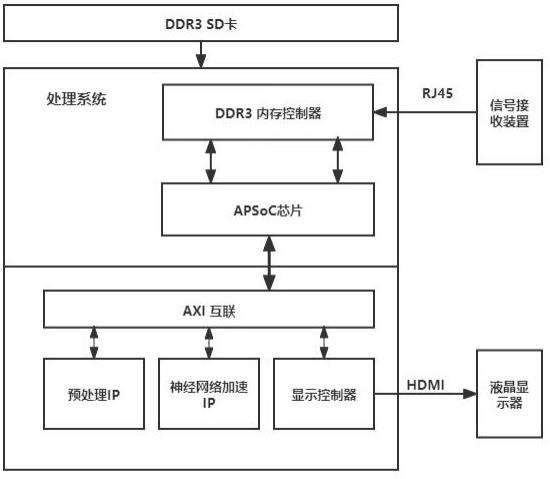
图1为实施例中结构图示意图;
[0035]
图2为实施例方中法流程示意图。
具体实施方式
[0036]
下面结合附图和实施例对本发明的内容作进一步的阐述,但不是对本发明的限定。
[0037]
实施例:
[0038]
参照图1,一种基于pynq的无人机识别系统,包括pynq-z2和与pynq-z2连接的信号接收装置、液晶显示器lcd及sd卡,pynq-z2与信号接收装置采用双绞线连接,所述pynq-z2为基于双核cortex-a9处理器的fpga开发板,fpga开发板设有apsoc芯片、axi数据传输总线、ddr3内存控制器、rj45接口、hdmi out接口、sd card接口,ddr3内存控制器与aspsoc芯片和sd card接口连接、aspsoc芯片与rj45接口和hdmi out接口连接、rj45接口与双绞线连接、hdmi out接口和hdmi线连接、sd card接口和sd卡连接,其中,apsoc芯片设有可编程逻辑pl端和处理系统ps端,处理系统ps端与ddr3内存控制器连接,axi数据传输总线连接可编程逻辑pl端和处理系统ps端,所述可编程逻辑pl端设有数据传输模块、预处理ip核、神经网络加速ip核和hdmi高清显示模块,数据传输模块和axi数据传输总线连接,用于无人机信号流数据的存取;预处理ip核和axi数据传输总线连接,用于将接收到的信号提取有效部分,并生成三阶累积量的并行加速计算;神经网络加速ip核和axi数据传输总线连接,用于对神经网络的并行加速计算;hdmi高清显示模块和hdmi out接口连接,用于输出无人机识别结果,所述处理系统ps端设有无人机信号预处理模块和无人机信号识别模块。
[0039]
所述信号接收装置用于采集无人机信号。
[0040]
所述液晶显示器lcd用于显示无人机识别结果。
[0041]
所述双绞线用于信号接收装置与pynq-z2的数据传输。
[0042]
所述sd卡用于存储pynq-z2的操作系统、无人机识别的数据模型以及可执行代码。
[0043]
如图2所示,一种基于pynq的无人机识别方法,包括上述的基于pynq的无人机识别系统,所述方法包括如下步骤:
[0044]
1)信号的接收和预处理:采用信号接收装置接收无人机的控制信号,信号接收装置通过rj45接口将信号传输至pynq的ddr里,再经过axi数据传输总线传送至pynq的可编程逻辑pl端,在可编程逻辑pl端内采用预处理ip核,通过自适应阈值法,计算只包含噪声信号的无效区域信号的平均功率,和计算有效区域信号的平均功率,其中有效区域信号包含了噪声信号及无人机的信号;再通过将有效区域信号的平均功率值作为功率阈值,低于该阈值的信号视为无效区域信号而去除,留下有效区域信号;
[0045]
2)信号的射频指纹特征提取:采用步骤1)所述方法,分别采集每一个待识别无人机的有效区域信号,将有效区域信号进行功率归一化,以避免不同无人机信号功率不同的干扰,采用间接估计法计算出每一个待识别无人机信号的三阶累积量并储存在ddr中;
[0046]
3)训练用于信号识别的神经网络:采用tensorflow平台构建一个卷积神经网络,卷积神经网络设有:输入层、卷积层、池化层、全连接层、输出层,输入层用于输入待识别信号的三阶累积量,输出层用于输出无人机的识别结果,采用步骤2)的方法将x个待识别无人机的x类三阶累积量作为训练集,训练出神经网络;
[0047]
4)信号的分类识别:将在步骤3)中训练好的神经网络导入到sd卡中,再从sd卡读取到ddr中,将待识别的射频指纹特征送入到训练好的神经网络,启动神经网络加速ip核进行计算,循环执行该神经网络中的卷积层、池化层和全连接层的正向推导计算,获得信号识别结果,计算后把结果写回ddr;
[0048]
5)将步骤4)中获得的信号识别结果通过hdmi高清显示模块输出到液晶显示器lcd上。
[0049]
步骤2)中所述的三阶累积量为采用间接估计法计算,过程如下:
[0050]
3-1)将原信号中n个数据分为k段,每段含m个样本;
[0051]
3-2)设x
(k)
(0),x
(k)
(1),......,x
(k)
(m-1)为第k段数据,其中k=1,...,k,计算各段的三阶累积量的估计值:
[0052][0053]
3-3)取所有段的三阶累积量的平均值作为整个观测数据组的三阶累积量估计,即
[0054][0055]
其中,公式(1)、(2)中i、j为信号的延迟量,i=-m,...,m,j=-m,...,m,公式(1)中m1为0、-i、-j三者中的最大值,公式(1)中m2为m-1、m-1-i、m-1-j三者中的最小值。本例中,pynq-z2是xilinx公司开发的基于双核cortex-a9处理器的fpga开发板;信号装置为usrp,型号为e310,adc/dac芯片为ad9361;sd卡存储格式为fat32,存储容量为64gb。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
