1.本发明涉及茶叶生产自动化领域,具体为一种茶叶无人机自动采摘装置。
背景技术:
2.即采摘青茶,采摘是用食指与姆指挟住叶间幼梗的中部,藉两指的弹力将茶叶摘断,采摘时间以中午十二时至下午三时前较佳,不同的茶采摘部位也不同,有的采一个顶芽和芽旁的第一片叶子叫一心一叶,有的多采一叶叫一心二叶,也有一心三叶,则另有单人式、双人式采茶机,可利用机械采茶,既省力且快速。
3.采茶机是从茶树顶梢采收新嫩茶叶的作物收获机械。按采摘方法不同分选择性采茶机和非选择性采茶机两类,选择性采茶机有折断式和摩擦式等类型。前者是利用弯曲折断原理,采下鲜嫩茶叶而保留粗老枝条;后者是用一对弹性摘指夹住茶叶,依靠摘指与茶叶间的静摩擦力,摘下新叶而保留老叶和幼芽,由于生产效率低且对茶园作业条件的要求高等原因,选择性采茶机未获大量推广。
4.传统采茶机由于仍需要人工进行操作,此时每个人工所能提供的工作量就变得更为重要了,所以功能更好的选择性采茶机无法获得大量推广,且现有的采茶机弧度调节较为繁琐,类似园林裁切机结构的采茶机往往不具备弧度调节结构,从而无法适配不同树顶造型的茶树。
技术实现要素:
5.基于此,本发明的目的是提供一种茶叶无人机自动采摘装置,以解决的目前采茶机生产效率受人工效率限制、采摘弧度调解困难技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种茶叶无人机自动采摘装置,包括采集器外壳,所述采集器外壳内部设置有电机,所述电机输出端通过传动结构连接有切割板及连接杆,所述采集器外壳底部一端设置有与所述切割板活动连接的引导板,所述引导板底部设置有与所述切割板配合的引导槽及多组引导翼板,所述连接杆底部一端设置有滑动套壳,所述滑动套壳外侧设置有引导凸起,所述采集器外壳内壁设置有与所述引导凸起配合的滑动槽,所述滑动套壳与所述引导板之间设置有传动结构。
7.通过采用上述技术方案,设置的采集器外壳保护内部组件,通过电机带动第二扇叶及曲轴转动,通过切割板与引导板相互配合,形成剪切,从而对茶叶进行采摘,通过连接杆带动滑动套壳移动,通过引导凸起与滑动槽相互配合,进而使滑动套壳移动时可以产生一定的上下位移,通过传动结构使引导板随着滑动套壳的移动而产生一定的变形。
8.本发明进一步设置为,所述滑动套壳底部设置有上铰支座,所述上铰支座底部铰接有推动杆,所述推动杆底部铰接有与所述引导板滑动连接的下铰支滑台,所述引导板顶部开设有与所述下铰支滑台配合的底部滑槽。
9.通过采用上述技术方案,设置的上铰支座带动推动杆移动,通过推动杆带动下铰支滑台移动,通过下铰支滑台推动引导板并使引导板变形,通过底部滑槽使下铰支滑台可
以滑动。
10.本发明进一步设置为,所述电机输出端设置有曲轴,所述曲轴内部中间设置有连接轴,所述连接轴外侧滑动套接有与所述切割板配合的联动板,所述联动板内部开设有与所述连接轴配合的滑槽,所述曲轴远离所述电机一端设置有往复丝杆,所述往复丝杆外侧设置有与所述连接杆配合的丝杆套环。
11.通过采用上述技术方案,设置的曲轴带动往复丝杆及联动板转动,通过连接轴带动联动板转动,通过联动板带动切割板移动,进而与引导板形成剪切功能,通过滑槽使连接轴在联动板内部滑动,从而使连接轴的垂直位移不会对联动板产生影响,通过往复丝杆带动丝杆套环前后移动,通过丝杆套环带动连接杆移动。
12.本发明进一步设置为,所述切割板内部开设有多组与所述引导翼板配合的连接滑槽,所述引导翼板贯穿至所述切割板底部,所述引导翼板下端延伸部分设置有曲面结构,所述引导板底部设置有与所述切割板配合的引导边槽。
13.通过采用上述技术方案,设置的连接滑槽使引导翼板可以在连接滑槽内部滑动,通过曲面结构使引导翼板可以适应切割板变形后的形状,通过引导边槽使切割板与引导板能够在变形时仍然保持契合。
14.本发明进一步设置为,所述引导板及所述切割板内部皆开设有多组引导槽,所述引导板靠近所述采集器外壳一侧中部与所述采集器外壳固定连接,其余部分与所述采集器外壳之间连接有弹性膜,所述切割板及所述引导板皆采用具有弹性的材料加工。
15.通过采用上述技术方案,设置的引导槽引导茶叶进入,进而方便切割板进行切割,通过弹性膜避免引导板变形后茶叶漏出,通过具有弹性的材料使引导板及切割板可以变形,进而使引导板及切割板可以适应各种弧度。
16.本发明进一步设置为,所述采集器外壳远离所述引导板一端设置有风筒,所述电机靠近所述风筒一侧通过转动结构连接有第二扇叶。
17.通过采用上述技术方案,设置的风筒引导第二扇叶的风向,通过第二扇叶带动气流流动。
18.本发明进一步设置为,所述风筒内部一端设置有后罩网,所述风筒内部远离所述后罩网一端设置有隔离网。
19.通过采用上述技术方案,设置的后罩网保护风筒后部,避免异物进入,通过隔离网避免茶叶及异物进入第二扇叶中。
20.本发明进一步设置为,所述电机与所述第二扇叶之间连接有单向轴杆。
21.通过采用上述技术方案,设置的单向轴杆限制扭矩的传输方向,使电机反转时不会带动第二扇叶。
22.本发明进一步设置为,所述采集器外壳顶部设置有主机,所述主机外侧设置有多组第一扇叶。
23.通过采用上述技术方案,设置的主机控制设备多组第一扇叶及电机运转。
24.综上所述,本发明主要具有以下有益效果:
25.1、本发明通过主机对工作情况进行检测,根据检测出的结果调整引导板及切割板的弧度,调整时电机带动曲轴转动,进而带动往复丝杆转动,从而带动丝杆套环移动,丝杆套环移动时带动连接杆及滑动套壳移动,滑动套壳移动时在引导凸起及滑动槽的配合下产
生上下位移,进而推动推动杆移动,并推动引导板两侧,从而使引导板弯曲至契合树冠的弧度,避免传统裁切结构弧度难以调整的弊端;
26.2、本发明通过无人机配合视觉检测配合其自动移动的能力来实现无人生产,主机对茶树的情况进行视觉检测,当可以采摘时,多组第一扇叶带动设备移动至工作位置进行采摘,从而使茶叶采摘脱离人工效率的限制。
附图说明
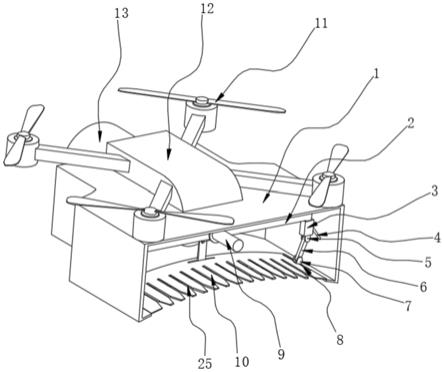
27.图1为本发明的整体示意图;
28.图2为本发明的局部剖视图;
29.图3为本发明的内部结构图;
30.图4为本发明图3的a细节放大图;
31.图5为本发明的主体结构图;
32.图6为本发明图5的b细节放大图;
33.图7为本发明的外部示意图。
34.图中:1、采集器外壳;2、连接杆;3、滑动套壳;4、滑动槽;5、上铰支座;6、推动杆;7、下铰支滑台;8、底部滑槽;9、往复丝杆;10、引导板;11、第一扇叶;12、主机;13、风筒;14、后罩网;15、第二扇叶;16、隔离网;17、电机;18、联动板;19、曲轴;20、切割板;21、连接轴;22、丝杆套环;23、单向轴杆;24、引导凸起;25、引导槽;26、连接滑槽;27、引导边槽;28、引导翼板。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
36.下面根据本发明的整体结构,对其实施例进行说明。
37.一种茶叶无人机自动采摘装置,如图1、图5和图7所示,包括采集器外壳1,通过设置的采集器外壳1保护内部组件,采集器外壳1内部设置有电机17,电机17转动时带动曲轴19及往复丝杆9转动,此时丝杆套环22由于连接杆2的限制,无法转动,故而在往复丝杆9的转动下进行轴向移动,电机17输出端通过传动结构连接有切割板20及连接杆2,通过切割板20与引导板10相互配合,形成剪切,从而对茶叶进行采摘,采集器外壳1底部一端设置有与切割板20活动连接的引导板10,引导板10底部设置有与切割板20配合的引导槽25及多组引导翼板28,引导板10变形时,由于切割板20与引导板10贴合,且有多组引导翼板28及引导边槽27与其配合,由于引导翼板28底部翼板与切割板20接触部分设置有曲面结构,使引导翼板28可以适应切割板20变形后的形状,能够在变形时仍然持续的保持契合,并进一步限制切割板20变形的各个节点,故而切割板20会随着引导板10的变形而产生相同的变形,连接杆2底部一端设置有滑动套壳3,滑动套壳3外侧设置有引导凸起24,采集器外壳1内壁设置有与引导凸起24配合的滑动槽4,由于滑动套壳3外侧引导凸起24与滑动槽4的契合,滑动套壳3在轴向移动的同时会产生上下移动,进而推动推动杆6下压或上拉,由于引导板10中部与采集器外壳1之间固定连接,引导板10在推动杆6的作用下产生弹性变形,滑动套壳3与引
导板10之间设置有传动结构,通过传动结构使引导板10随着滑动套壳3的移动而产生一定的变形。
38.请参阅2图,滑动套壳3底部设置有上铰支座5,通过设置的上铰支座5带动推动杆6移动,上铰支座5底部铰接有推动杆6,引导板10在推动杆6的作用下产生弹性变形,进而带动切割板20同步变形,从而使引导板10及切割板20与不同弧度的茶树树冠契合,推动杆6底部铰接有与引导板10滑动连接的下铰支滑台7,引导板10顶部开设有与下铰支滑台7配合的底部滑槽8,下铰支滑台7在推动杆6的推动下会产生移动,前后的移动通过底部滑槽8进行适配,从而使下铰支滑台7一直与引导板10契合,而下铰支滑台7上下的移动会挤压或拉动引导板10,并使其变形。
39.请参阅图2,电机17输出端设置有曲轴19,曲轴19内部中间设置有连接轴21,连接轴21外侧滑动套接有与切割板20配合的联动板18,曲轴19内部的连接轴21转动时带动联动板18移动,由于联动板18内部开设有滑槽,连接轴21的下上位移不会影响到联动板18,而左右位移会带动联动板18左右移动,进而带动切割板20移动,从而与引导板10相互配合,对引导槽25内的茶叶进行剪切,联动板18内部开设有与连接轴21配合的滑槽,曲轴19远离电机17一端设置有往复丝杆9,往复丝杆9外侧设置有与连接杆2配合的丝杆套环22,电机17转动时带动曲轴19及往复丝杆9转动,此时丝杆套环22由于连接杆2的限制,无法转动,故而在往复丝杆9的转动下进行轴向移动,丝杆套环22进行轴向移动时带动连接杆2一并移动。
40.请参阅图5和图7,切割板20内部开设有多组与引导翼板28配合的连接滑槽26,通过设置的连接滑槽26使引导翼板28可以在连接滑槽26内部滑动,引导翼板28贯穿至切割板20底部,引导翼板28下端延伸部分设置有曲面结构,引导板10底部设置有与切割板20配合的引导边槽27,由于切割板20与引导板10贴合,且有多组引导翼板28及引导边槽27与其配合,由于引导翼板28底部翼板与切割板20接触部分设置有曲面结构,使引导翼板28可以适应切割板20变形后的形状,能够在变形时仍然持续的保持契合,并进一步限制切割板20变形的各个节点,故而切割板20会随着引导板10的变形而产生相同的变形。
41.请参阅图5和图7,引导板10及切割板20内部皆开设有多组引导槽25,通过设置的引导槽25引导茶叶进入,进而方便切割板20进行切割,引导板10靠近采集器外壳1一侧中部与采集器外壳1固定连接,其余部分与采集器外壳1之间连接有弹性膜,切割板20及引导板10皆采用具有弹性的材料加工,由于引导板10中部与采集器外壳1之间固定连接,引导板10在推动杆6的作用下产生弹性变形,进而带动切割板20同步变形,从而使引导板10及切割板20与不同弧度的茶树树冠契合。
42.请参阅图2,采集器外壳1远离引导板10一端设置有风筒13,通过设置的风筒13引导第二扇叶15的风向,电机17靠近风筒13一侧通过转动结构连接有第二扇叶15,第二扇叶15加速旋转产生的气流可以加速设备的飞行速度,从而使设备更快的到达卸货点,利用无人机自身形成倾角,进而将采集器外壳1内部采摘的茶叶倾倒至收集点。
43.请参阅图2,风筒13内部一端设置有后罩网14,通过设置的后罩网14保护风筒13后部,避免异物进入,风筒13内部远离后罩网14一端设置有隔离网16,通过隔离网16避免茶叶及异物进入第二扇叶15中。
44.请参阅图3,电机17与第二扇叶15之间连接有单向轴杆23,通过设置的单向轴杆23限制扭矩的传输方向,使电机17反转时不会带动第二扇叶15。
45.请参阅图,采集器外壳1顶部设置有主机12,通过设置的主机12控制设备多组第一扇叶11及电机17运转,主机12外侧设置有多组第一扇叶11,当无人机通过视觉检测发现合适采摘的茶树时,控制第一扇叶11相互配合,从而使设备整体飞抵茶树一端的树冠上方。
46.本发明的工作原理为:先将电池等电源装置安装于主机12内部,安装完毕后通过外部无线系统进行操控,当无人机通过视觉检测发现合适采摘的茶树时,控制第一扇叶11相互配合,从而使设备整体飞抵茶树一端的树冠上方,根据视觉检测的结果启动电机17,电机17转动时带动曲轴19及往复丝杆9转动,此时丝杆套环22由于连接杆2的限制,无法转动,故而在往复丝杆9的转动下进行轴向移动,丝杆套环22进行轴向移动时带动连接杆2一并移动,由于滑动套壳3外侧引导凸起24与滑动槽4的契合,滑动套壳3在轴向移动的同时会产生上下移动,进而推动推动杆6下压或上拉,由于引导板10中部与采集器外壳1之间固定连接,引导板10在推动杆6的作用下产生弹性变形,进而带动切割板20同步变形,从而使引导板10及切割板20与不同弧度的茶树树冠契合,契合后电机17快速运转,进而电动切割板20与引导板10之间形成剪切,从而对茶叶进行切割,同时电机17通过单向轴杆23带动第二扇叶15转动,使空气从引导板10方向进入,并从风筒13一端吹出,气流会将切下的茶叶吹入至采集器外壳1内部,同时第二扇叶15带动的气流可以加强设备向前的动力,主动产生的气流也可以减少设备移动时的阻力,并使采集下的茶叶持续向采集器外壳1内部聚集,避免茶叶洒出的情况出现,当局部采集完毕或采集器外壳1内部被装满后,电机17加速运转,使第二扇叶15加速旋转产生的气流可以加速设备的飞行速度,从而使设备更快的到达卸货点,利用无人机自身形成倾角,进而将采集器外壳1内部采摘的茶叶倾倒至收集点,倾倒完毕后即可进行下一次采摘;
47.引导板10与切割板20之间通过多组引导翼板28及引导边槽27进行连接,切割时电机17带动曲轴19转动,曲轴19内部的连接轴21转动时带动联动板18移动,由于联动板18内部开设有滑槽,连接轴21的下上位移不会影响到联动板18,而左右位移会带动联动板18左右移动,进而带动切割板20移动,从而与引导板10相互配合,对引导槽25内的茶叶进行剪切;
48.下铰支滑台7在推动杆6的推动下会产生移动,前后的移动通过底部滑槽8进行适配,从而使下铰支滑台7一直与引导板10契合,而下铰支滑台7上下的移动会挤压或拉动引导板10,并使其变形,引导板10变形时,由于切割板20与引导板10贴合,且有多组引导翼板28及引导边槽27与其配合,由于引导翼板28底部翼板与切割板20接触部分设置有曲面结构,使引导翼板28可以适应切割板20变形后的形状,能够在变形时仍然持续的保持契合,并进一步限制切割板20变形的各个节点,故而切割板20会随着引导板10的变形而产生相同的变形。
49.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
