1.本实用新型涉及土豆收获机领域,具体而言,涉及一种土豆收获机的差速驱动机构。
背景技术:
2.目前,土豆、红薯等作物的收获机械主要有手扶拖拉机牵引式土豆收获机和四轮拖拉机牵引式土豆收获机等产品。
3.随着土豆种植面积的扩大,还有土豆种植的集中,上述的土豆收获机已经不能满足大规模种植的需要。
4.鉴于此,目前开发了大型的自走式土豆收获机,但是这些土豆收获机采用的是传统的履带结构,笨重,油耗高,且维护效率慢,还有就是智能化程度较低。
5.鉴于此,本实用新型开发了一种土豆收获机的差速驱动机构,利用差速驱动的方式进行移动和转向,同时便于维护和更换,还能实现智能化控制,实现收获机整体自动化控制的目标。
技术实现要素:
6.本实用新型针对现有技术的缺点,提供了一种土豆收获机的差速驱动机构,解决了上述技术存在的缺陷。
7.为了实现上述目的,本实用新型采用了如下技术方案:
8.土豆收获机的差速驱动机构,与土豆收获机本体相对应,土豆收获机本体的底端安装在托架上;托架的下部设置有差速驱动机构;其特征在于:所述差速驱动机构包括安装在托架两侧的两个支撑结构,每一个支撑机构的下部安装有支重轮组件,且支撑机构的前部设置有驱动轮组件,后部安装有从动轮组件;所述支重轮组件、驱动轮组件和从动轮组件共同连接有履带;所述两侧的两个支撑结构的前部之间安装有安装架,安装架上安装有方向相反的两个驱动机构;所述每一个驱动机构分别传动连接相对应的驱动轮组件;所述两个驱动机构共同连接有控制器,在支撑结构上分别设置有位移传感器和角度传感器,位移传感器和角度传感器共同连接控制器。
9.优化的方案,所述支撑机构包括连接在托架一侧的支撑架;支撑架包括若干横向横杆和竖向竖杆,横向横杆和竖向竖杆通过螺栓连接在一起;所述支撑架的下部安装有若干支重轮组件;所述支撑架的前部设置有驱动轮组件,后部安装有从动轮组件。
10.优化的方案,所述支重轮组件包括4-8个轴安装在支撑架下部的支重轮;所述驱动轮组件包括安装在支撑架前上部的驱动齿轮;所述从动轮组件包括安装在支撑架后上部的从动齿轮。
11.优化的方案,所述驱动机构包括安装在安装架上的电机和减速机;电机传动连接减速机;所述减速机传动连接有驱动转轴;所述驱动转轴的端部键连接有驱动齿轮。
12.优化的方案,所述控制器采用的是控制板,控制板上安装有单片机。
13.由于采用了上述技术,与现有技术相比较,本实用新型的有益效果是:
14.本实用新型设计合理,利用两个电机分别驱动一侧的履带进行移动;电机同向同速驱动的时候,两条履带带动整体进行移动;电机同向不同速的时候,两条履带带动整体实现向速度慢的履带一侧转向;电机一个工作另外一个不工作的时候,整体实现原地转向;这样的驱动方式采用两个电机分开控制,维护的时候可以只维修一部分,不需要像之前那样整体维修;维护也可以分开维护,另外,控制器的使用可以对接整体收获机上的控制系统,自动化程度高,大大节省了制造费用及管理成本,加快了生产效率。
附图说明
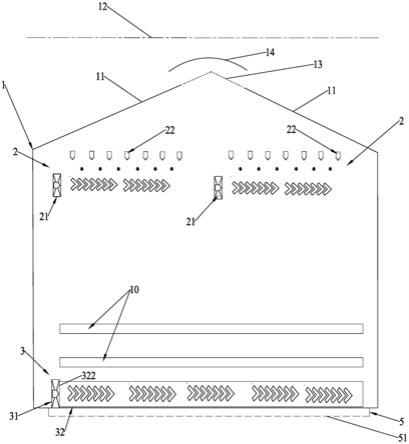
15.图1为本实用新型一种实施例的整体结构示意图;
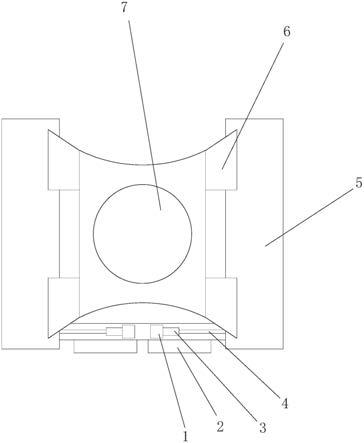
16.图2为本实用新型一种实施例的一侧履带和支撑架的结构示意图;
17.图3为本实用新型一种实施例的控制原理框图。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.实施例
20.如图1-3所示,土豆收获机的差速驱动机构,与土豆收获机本体相对应,土豆收获机本体的底端安装在托架7上。托架7的下部设置有差速驱动机构。另外,根据实际需要,托架7的四周通过托板6连接支撑架。托板的数目为四个,成四角分布。
21.所述差速驱动机构包括安装在托架两侧的两个支撑结构,每一个支撑机构的下部安装有支重轮组件,且支撑机构的前部设置有驱动轮组件,后部安装有从动轮组件。所述支重轮组件、驱动轮组件和从动轮组件共同连接有履带5。在本市实例中,所述支撑机构包括连接在托架一侧的支撑架11。支撑架11包括若干横向横杆8和竖向竖杆,横向横杆和竖向竖杆通过螺栓连接在一起。所述支撑架11的下部安装有若干支重轮组件10。所述支撑架的前部设置有驱动轮组件9,后部安装有从动轮组件12。所述支重轮组件包括4-8个轴安装在支撑架下部的支重轮;所述驱动轮组件包括安装在支撑架前上部的驱动齿轮;所述从动轮组件包括安装在支撑架后上部的从动齿轮。
22.所述两侧的两个支撑结构的前部之间安装有安装架2,安装架2上安装有方向相反的两个驱动机构。所述每一个驱动机构分别传动连接相对应的驱动轮组件。所述驱动机构包括安装在安装架上的电机1和减速机3;电机1传动连接减速机3;所述减速机3传动连接有驱动转轴4。所述驱动转轴的端部键连接有驱动齿轮。
23.所述两个驱动机构共同连接有控制器,在支撑结构上分别设置有位移传感器和角度传感器,位移传感器和角度传感器共同连接控制器。所述控制器采用的是控制板,控制板上安装有单片机。
24.工作的时候,按照控制器接收到的信号,通过电机自带的编码器进行信号的传递,控制两个电机工作,传感器进行数据的采集并反馈到控制器内。电机同向同速驱动的时候,两条履带带动整体进行移动;电机同向不同速的时候,两条履带带动整体实现向速度慢的
履带一侧转向;电机一个工作另外一个不工作的时候,整体实现原地转向。驾驶员感觉收获机上的控制系统控制履带的运动。
25.本实用新型设计合理,利用两个电机分别驱动一侧的履带进行移动;这样的驱动方式采用两个电机分开控制,维护的时候可以只维修一部分,不需要像之前那样整体维修;维护也可以分开维护,另外,控制器的使用可以对接整体收获机上的控制系统,自动化程度高,大大节省了制造费用及管理成本,加快了生产效率。
26.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
27.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
28.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。