技术特征:
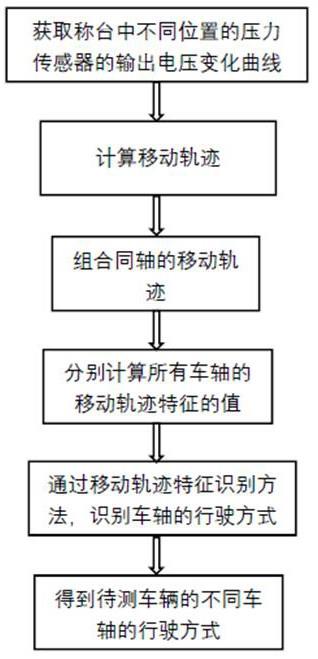
1.基于移动轨迹特征的动态汽车衡作弊检测方法,其特征在于,所述方法包含以下步骤:s1:根据称台中不同位置的压力传感器的输出电压变化曲线,计算得到待测车辆的移动轨迹;s2:将属于同一根车轴的移动轨迹进行组合;s3:分别计算所有车轴的移动轨迹特征的值;s4:根据移动轨迹特征的值和移动轨迹特征识别方法,分别识别待测车辆的各个车轴的行驶方式。2.如权利要求1所述的基于移动轨迹特征的动态汽车衡作弊检测方法,其特征在于,步骤s1中所述的移动轨迹,是由一些间距小于某一阈值的接触点构成的轨迹,所述的接触点,是待测车辆的车轮与称台的实际接触面的中心点。3.如权利要求1所述的基于移动轨迹特征的动态汽车衡作弊检测方法,其特征在于,步骤s3中所述的移动轨迹特征,包括以下:1)l
il
l
ir
与车辆宽度x的差值l
ix
;4l-x与l
il
l
ir
的差值l
i4l-x
,其中l
il
为左移动轨迹与左称台的左边缘的平均距离;l
ir
为右移动轨迹与左称台的左边缘的平均距离;l为垂直于行车方向的称台长度,i为车轴的编号,x为车辆宽度;所述的左移动轨迹为根据左称台的压力传感器的输出电压计算得到的移动轨迹;所述右移动轨迹为根据右称台的压力传感器的输出电压计算得到的移动轨迹;2)左移动轨迹的数量k
il
;右移动轨迹的数量k
ir
;3)左移动轨迹的前段时长与后段时长的比值r
il
;右移动轨迹的前段时长与后段时长的比值r
ir
;所述的前段时长为移动轨迹中点与移动轨迹起点的采样时刻之差;所述的后段时长为移动轨迹终点与移动轨迹中点的采样时刻之差;所述的移动轨迹起点为移动轨迹的第一个接触点;所述的移动轨迹终点为移动轨迹的最后一个接触点;所述的移动轨迹中点为与移动轨迹起点和终点的距离相等的接触点;4)左移动轨迹长度s
il
;右移动轨迹长度s
ir
;所述移动轨迹长度为移动轨迹终点与移动轨迹起点的距离之差;5)左移动轨迹形状p
il
;右移动轨迹形状p
ir
。4.如权利要求3所述的基于移动轨迹特征的动态汽车衡作弊检测方法,其特征在于,步骤s4中所述的移动轨迹特征识别方法,包含以下步骤:步骤s4-1、初始化i=1;步骤s4-2、将第i根车轴的移动轨迹特征的值与正常行驶时的值进行对比或计算;步骤s4-3、提取对比结果不同或计算结果的差值大于设定阈值的移动轨迹特征;步骤s4-4、若提取的移动轨迹特征的数量等于0,则行驶方式为正常行驶,并跳转步骤s4-10;反之,则下一步;步骤s4-5、若提取的移动轨迹特征中存在k
il
或k
ir
,则行驶方式为绕边,并跳转步骤s4-10;反之,则下一步;步骤s4-6、若提取的移动轨迹特征中存在p
il
或p
ir
,则行驶方式为走s形,并跳转步骤s4-10;反之,则下一步;
步骤s4-7、若提取的移动轨迹特征中存在s
il
或s
ir
,则行驶方式为垫钢板,并跳转步骤s4-10;反之,则下一步;步骤s4-8、若提取的移动轨迹特征中存在l
ix
或l
i4l-x
,则行驶方式为压边,并跳转步骤s4-10;反之,则下一步;步骤s4-9、若提取的移动轨迹特征中存在r
il
或r
ir
,如果比值均大于1,则行驶方式为跳秤;如果比值均小于1,则行驶方式为拖秤;步骤s4-10、保存第i根轴的行驶方式,并且i的值加1;步骤s4-11、若i小于或等于车轴数,则跳转步骤s4-2;反之,则下一步;步骤s4-12、输出所有车轴的行驶方式。
技术总结
本发明公开了一种基于移动轨迹特征的动态汽车衡作弊检测方法。本发明通过分析称台中不同位置的压力传感器的输出电压变化曲线,计算待测车辆的移动轨迹,再组合同一根车轴的移动轨迹,并计算车轴的移动轨迹特征,结合移动轨迹特征的值和移动轨迹特征识别方法,能够对车轴进行包括压边、绕边、走S形、跳秤、拖秤、垫钢板在内的作弊行为的检测。本发明通过分析车辆的车轮在不同行驶方式下的移动轨迹,并计算车轴的移动轨迹特征的值,能够识别车轴的多种行驶方式;不同车轴分别分析,能够避免将单个车轴的异常行为作为整车的异常行为。车轴的异常行为作为整车的异常行为。车轴的异常行为作为整车的异常行为。
技术研发人员:许素安 陈兴 富雅琼 徐红伟 洪凯星 袁科
受保护的技术使用者:中国计量大学
技术研发日:2022.01.25
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。