1.本发明涉及一种监测图像实时去雾方法,特别是一种用于道路监测的实时去雾方法。
背景技术:
2.道路监控是交通监测系统获取实时图像数据,实现数字化、可视化管理的重要渠道。然而,当监测场景处在雾天环境时,低质量的雾天道路监测数据,易引发交通监测系统“失明”,难以确保交通险患的及时回馈和排解。因而,实施道路监测场景图像去雾,复原出无雾监测场景在交通监测系统中具有重要价值。现有图像去雾技术中,基于大气散射模型的去雾技术最为高效,其主要包括:基于图像先验的去雾技术、基于学习策略的去雾技术。其中,基于图像先验的去雾技术,通过挖掘先验参数,然后引入大气散射模型,实施监测图像的去雾复原,这类方法的缺点在与高度依赖先验知识的准确性;基于学习策略的去雾技术,通过机器学习建立去雾系统,实施监测场景去雾,此类方法的缺点在于,需要大量的标签图像进行训练,且去雾速度慢,很难实现实时去雾。此外上述两类方法还存在一个共同的缺点,即,去雾结果的优劣严重依赖透射率和环境光估计或计算的精度。然而,基于散射模型求解透射率和环境光,属于数学上的病态问题,即,在此模型上的去雾结果,从理论上只能逼近真实场景,即未知无雾场景,很难准确求解。
技术实现要素:
3.发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种用于道路监测的实时去雾方法。
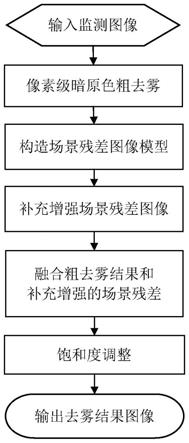
4.为了解决上述技术问题,本发明公开了一种用于道路监测的实时去雾方法,包括以下步骤:
5.步骤1,基于像素级暗原色进行监测场景图像粗去雾,得到粗去雾结果;
6.步骤2,以透射率残差建立监测场景残差图像计算模型;
7.步骤3,基于retinex方法补充增强场景残差图像,得到场景残差调整结果;
8.步骤4,融合粗去雾结果和场景残差调整结果,复原监测场景,得到去雾结果图像;
9.步骤5,调整去雾结果图像的饱和度,提升监测场景的视觉效果,输出最终去雾结果图像,完成道路监测的实时去雾。
10.本发明中,步骤1包括:
11.步骤1-1,计算监测到的雾天图像即监测场景图像的像素级暗原色方法如下:
[0012][0013]
其中,c代表监测场景图像y中的任一像素yi的颜色通道,r代表红色通道,g代表绿色通道,b代表蓝色通道,是像素yi在不同颜色通道的光强;a是环境光,ac是上述三种颜
色通道环境光强;min是求极小值的运算;
[0014]
步骤1-2,计算监测场景图像中任一像素yi的透射率,方法如下:
[0015][0016]
其中,ti是像素yi的透射率;
[0017]
步骤1-3,计算监测场景图像的粗去雾结果图像方法如下:
[0018][0019]
其中,是对应的粗去雾结果。
[0020]
本发明中,步骤2包括:
[0021]
步骤2-1,计算透射率残差,方法如下:
[0022][0023]
其中,是像素yi的透射率残差,是未知无雾场景图像x中对应像素xi的像素级暗原色,计算方法如下:
[0024][0025]
其中,是像素xi在每一个颜色通道c的光强,计算方法如下:
[0026][0027]
其中,是像素yi的准确透射率,根据大气散射成像模型得到,具体计算方法如下:
[0028][0029]
步骤2-2,根据和得到像素yi的准确透射率为:
[0030][0031]
其中,得到准确透射率与步骤1-2中所述透射率ti和步骤2-1中所述透射率残差之间的关系如下:
[0032][0033]
步骤2-3,未知无雾场景图像中像素xi的每一个颜色通道的光强用透射率ti和透射率残差表示为:
[0034]
[0035]
其中,是的粗去雾结果,表示监测场景残差;
[0036]
步骤2-4,建立监测场景残差图像计算模型,方法如下:
[0037][0038]
其中,为监测场景残差图像中像素在颜色通道c上的光强;
[0039]
步骤2-5,根据步骤1-3和步骤2-4,监测场景残差图像计算模型进一步表达为:
[0040][0041]
本发明步骤3中,采用基于retinex方法补充增强步骤2-5中所述的监测场景残差图像计算模型,方法如下:
[0042][0043]
其中,是对补充增强后的结果,即补充增强后的残差图像中像素在颜色通道c上的光强,是调整的入射光。
[0044]
本发明步骤3中所述的retinex方法如下:
[0045]
o=l
·r[0046]
其中,o表示观测图像,l表示入射光强,r表示场景的反射。
[0047]
本发明步骤3中,监测场景残差图像计算模型中的入射光强场景的反射观测到的监测场景残差图像为
[0048]
本发明步骤3中,采用如下方法调整入射光强
[0049][0050]
其中,是粗去雾结果图像在像素上的暗原色,计算方法与和相同,是像素在颜色通道c上的光强,c∈{r,g,b},是像素的亮度,α,β,γ是技术参数,满足α=β=γ=1/3。
[0051]
本发明步骤4中,融合粗去雾结果和场景残差调整结果,得到去雾结果图像方法如下:
[0052][0053]
其中,是去雾结果图像中像素在颜色通道c上的光强。
[0054]
本发明步骤5中,采用饱和度提升的方式调整去雾结果图像的视觉效果,方法如下:
[0055][0056]
其中,是的饱和度图,τ是调整系数,是经过调整后的饱和度图。
[0057]
本发明步骤5中,采用监测场景图像y的亮度和饱和度以及去雾结果图像的亮度和饱和度计算调整系数τ,计算方法如下:
[0058][0059][0060][0061][0062]
其中,是去雾结果图像的亮度和饱和度的有效差值,ωy是监测场景图像y的亮度和饱和度的有效差值,σ是用于计算亮度和饱和度有效差值的阈值,是去雾结果图像的亮度和,是去雾结果图像的饱和度和,是监测场景图像的亮度和,是监测场景图像的饱和度和,m
·
n是去雾结果图像和监测场景图像的尺寸,是去雾结果图像中像素的亮度:的亮度:分别是像素的红、绿、蓝三个颜色通道的光强,是像素的饱和度:的饱和度:和分别表示监测场景图像y中像素yi的亮度和饱和度,计算方式与相同。
[0063]
有益效果:
[0064]
本发明针对现有去雾技术中存在的实时性差、过度依赖先验或数据集训练的问题,从场景的残差调整角度出发,提供了一种实时、高效的去雾技术,以应对雾天环境下,道路监测场景的准确、实时捕捉。实现了实时高效的场景图像去雾和视觉效果保真。从而为雾天环境下,道路监测系统获取实时数据提供一种技术保障。
附图说明
[0065]
下面结合附图和具体实施方式对本发明做更进一步的具体说明,本发明的上述和/或其他方面的优点将会变得更加清楚。
[0066]
图1为本发明提供的用于道路监测的实时去雾方法流程示意图。
[0067]
图2为雾天环境下道路监测场景的图像。
[0068]
图3为基于暗原色和形态学的快速去雾(fdg)方法的复原结果示意图。
[0069]
图4为基于暗原色损失和上下文网路方法(dca)的去雾复原结果示意图。
[0070]
图5为本发明提供的方法的去雾复原后的场景示意图。
具体实施方式
[0071]
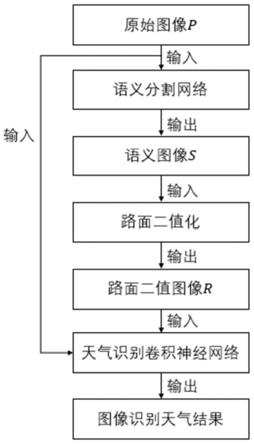
如图1所示,本发明提供了一种用于道路监测的实时去雾方法,主要通过像素级暗原色实现监测场景的粗去雾,通过构造场景残差并利用retinex方法对监测场景残差补充和增强;通过融合粗去雾结果图像和补充增强的监测场景残差图像,获得监测场景去雾结果;通过一种线性函数调整去雾结果图像的饱和度,输出最终监测场景的去雾结果图像。
[0072]
其中,基于像素级暗原色的粗去雾,包括以下步骤:
[0073]
步骤1:像素级暗原色的求解,在rgb(红、绿、蓝)颜色空间,其表达式为:
[0074][0075]
其中,是监测场景图像y在像素yi上的像素级暗原色,ac是环境光a在各颜色通道的光强,c是颜色通道,c∈{r,g,b},min是求极小值运算。
[0076]
步骤2:透射率的求解,其表达式为:
[0077][0078]
其中,ti是像素yi的透射率,通过导向滤波处理对其细化。
[0079]
步骤3:环境光求解,求取图像中所有像素暗原色亮度,其中亮度最大像素,即为场景整体环境光[ar,ag,ab]。
[0080]
步骤4:监测场景粗去雾结果图像的计算,其表达式为:
[0081][0082]
其中,是粗去雾检测场景图像的任一像素在颜色通道c上的光强,遍历所有像素即可得到
[0083]
其中,场景残差构造和retinex方法对监测场景残差补充和增强,包括以下步骤:
[0084]
步骤1:计算准确的场景透射率,其表达式为:
[0085][0086]
其中,是像素yi的准确透射率,是未知无雾监测场景图像x在像素xi上的像素级暗原色,其表达式为:
[0087][0088]
其中,未知无雾监测场景图像x的像素xi在颜色通道c上的光强。
[0089]
步骤2:计算透射率残差,其表达式为:
[0090][0091]
其中,即为透射率残差。根据大气散射成像模型:
[0092]
[0093]
带入和可计算出
[0094][0095]
因为,故可得准确透射率透射率ti和透射率残差之间的关系:
[0096][0097][0098]
步骤3:构造监测场景残差计算模型,其表达式为:
[0099][0100]
其中,是监测场景残差图像的像素在颜色通道c上的光强。未知无雾监测场景图像中像素xi的每个颜色通道的光强可以用透射率ti和透射率残差表示为:
[0101][0102]
其中,是的粗去雾结果因而监测场景残差可进一步表达为:
[0103][0104]
步骤4:根据retinex方法对监测场景残差补充和增强,其表达式为:
[0105][0106]
其中,是对补充增强后的结果,是补充增强后的监测场景残差图像,c代表颜色通道。根据retinex方法,表示入射光,其取代对场景残差进行补充和增强。
[0107]
上述retinex方法的数学模型是:
[0108]
o=l
·r[0109]
该模型中,o是观测图像,l是入射光,r是场景反射,对比场景残差模型光,r是场景反射,对比场景残差模型是场景残差图像,即观测图像,的物理意义也是场景的反射,若将视为场景的入射光,则,上述场景残差模型符合retinex理论,根据retinex理论入射光的强弱不改变图像的颜色和细节,仅改变图像的亮度,因而本发明采用增强入射光的方法对场景残差图像进行补充和调整。调整的入射光,采用如下公式表达:
[0110][0111]
上式中,是粗去雾结果图像在像素上的暗原色,计算方式与和相同,
是像素在颜色通道c上的光强,c∈{r,g,b},是像素的亮度,α,β,γ是技术参数,满足α=β=γ=1/3。
[0112]
其中,粗去雾结果图像和补充增强的监测场景残差图像的融合,其计算方式如下:
[0113][0114]
上式中,是去雾结果图像中像素在颜色通道c上的光强
[0115]
其中,复原结果图像的饱和度调整,包括以下步骤:
[0116]
步骤1:计算饱和度调整系数τ
[0117][0118]
其中,
[0119][0120][0121][0122]
此处,是去雾结果图像的亮度和饱和度的有效差值,ωy是监测场景图像y的亮度和饱和度的有效差值,σ是用于计算亮度和饱和度有效差值的阈值,σ=0.28,是去雾结果图像的亮度和,是去雾结果图像的饱和度和,是监测场景图像的亮度和,是监测场景图像的饱和度和,m
·
n是去雾结果图像和监测场景图像的尺寸,是去雾结果图像中像素的亮度:的亮度:分别是像素的红、绿、蓝三个颜色通道的光强,是像素的饱和度:的饱和度:和分别表示监测场景图像y中像素yi的亮度和饱和度,计算方式与相同。
[0123]
步骤2:调整去雾结果图像的饱和度,计算公式如下:
[0124][0125]
上式中,是的饱和度图,τ是调整系数,是经过调整后的饱和度图。
[0126]
表1是本发明方法fid、fdg方法和dca方法在intel(r)core(tm)i7-1510u cpu@1.80ghz 16.00gb ram pc机上用matlab2021a软件对改变不同分辨率的实际监测图像(如图2所示)的平均运算时间。由表中数据可以看出,相比于其他两种方法本发明方法运算时间最快,对于正常的道路监测,可满足实时性需求。
[0127]
表1三种去雾方法平均运算时间(单位,秒)
[0128][0129]
图3、图4、图5是fdg方法、dca方法以及本发明方法fid处理实际监测图像的结果,根据结果可以看出,相比于其他两种方法,本发明方法实时且高效。
[0130]
本发明提供了一种用于道路监测的实时去雾方法的思路及方法,具体实现该技术方案的方法和途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本实施例中未明确的各组成部分均可用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。