1.本发明属于图像配准技术领域,特别是涉及一种基于熵增优化的大型复杂构件点云全局匹配方法。
背景技术:
2.近些年,随着机器视觉技术的快速发展,三维图像获取硬件设备也迎来了跨越式的进步,随之而来的是数据量越来越庞大的点云图像。点云配准技术作为三维模型重建的关键技术,他将不同视角的面点云图像统一起来,重建出精确的三维模型。在航空航天、高铁动车、大型船舶等智能制造体系中,基于三维视觉图像的模型重建方法一直是一个需要攻克的关键技术。如果对于大型复杂异型曲面工件进行视觉检测是一个亟待解决的重大难题。
3.在飞机蒙皮、高铁转向架以及船舶螺旋桨中等一大批形状复杂、尺寸巨大的工件智能制造工艺中,在应用现有基于三维视觉的重建检测算法,往往会遇到尺寸大带来的图像拼接困难、形状复杂带来的测量精度低下以及边缘曲率复杂使得定位失败率高,现有的三维视觉的图像匹配算法难以实现高速高精高效率的视觉检测,更加难以对大型复杂异型曲面工件进行有效重建。
4.目前在一定先决条件下应用最广泛的算法是迭代最近点(iterative closest point)算法。它迭代的计算最优对应点集与求解误差最小的最优变换步骤直到算法收敛,算法高效且奠定了一个点云图像配准良好的框架基础。但是它对于点集的对应关系以及点云姿态初始位置都有极高的要求,难以满足现有大型构件的测量加工需求。
技术实现要素:
5.针对以上技术问题,本发明提供一种基于熵增优化的大型复杂构件点云全局匹配方法,其目的是为了解决背景技术中现有图像点云配准算法鲁棒性差、配准精度不高以及对大型复杂构件配准成功率低的技术问题。
6.一种基于熵增优化的大型复杂构件点云全局匹配方法,方法包括如下步骤:
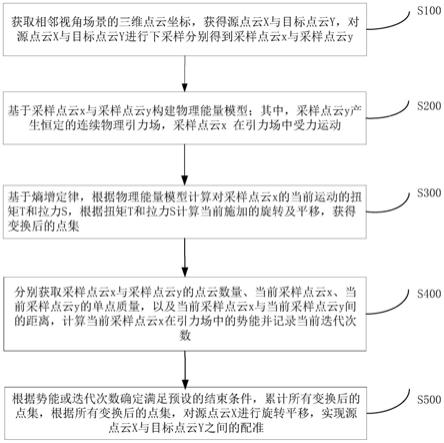
7.步骤s100:获取相邻视角场景的三维点云坐标,获得源点云x与目标点云y,对源点云x与目标点云y进行下采样分别得到采样点云x与采样点云y;
8.步骤s200:基于采样点云x与采样点云y构建物理能量模型;其中,采样点云y产生恒定的连续物理引力场,采样点云x在引力场中受力运动;
9.步骤s300:基于熵增定律,根据物理能量模型计算对采样点云x的当前运动的扭矩t和拉力s,根据扭矩t和拉力s计算当前施加的旋转及平移(rk,tk),获得变换后的点集;
10.步骤s400:分别获取采样点云x与采样点云y的点云数量、当前采样点云x、当前采样点云y的单点质量,以及当前采样点云x与当前采样点云y间的距离,计算当前采样点云x在引力场中的势能并记录当前迭代次数;
11.步骤s500:根据势能或迭代次数确定满足预设的结束条件,累计所有变换后的点
集,根据所有变换后的点集,对源点云x进行旋转平移,实现源点云x与目标点云y之间的配准。
12.优选地,步骤s100包括:
13.步骤s110:获取相邻视角场景的三维点云坐标,获得源点云x与目标点云y;
14.步骤s120:设定下采样阈值比例α%,通过对源点云x与目标点云y进行随机下采样分别得到源点云xα%点数量的点坐标与目标点云yα%点数量的点坐标,分别记为采样点云x与采样点云y。
15.优选地,步骤s120中设定下采样阈值比例α%具体为:
16.获取任一点p0在采样点云x中的最近点ps=argmin{||ps–
p0|||ps∈x},求取点云平均点间隙d,具体为:
[0017][0018]
其中,n是采样点云x的点数;
[0019]
根据最小包围框求取采样点云x的整体尺寸d,根据整体尺寸d、点云平均点间隙d计算得到采样阈值比例,具体为:
[0020]
α%=b*d/d
[0021]
其中,b为常数。
[0022]
优选地,步骤s200包括:
[0023]
步骤s210:设定采样点云y的每一个点为质点,网格化以采样点云y为中心的c3个的正立方体空间,获取各单个正立方体空间的中心点与采样点云y中各点的距离,以及方向从采样点云y中一个质点指向对应各单个正立方体空间的中心点的单位向量,并结合采样点云y的点云数量和采样点云y的各单点质量构建采样点云y产生的恒定能量场g;
[0024]
步骤s220:固定采样点云y的空间位置以及恒定能量场g。
[0025]
优选地,步骤s210包括:
[0026]
网格化以所述采样点云y为中心的c3个的正立方体空间,第c个正立方体空间的恒定能量场分量具体为:
[0027][0028]
其中,m为采样点云y的点云数量,g为万有引力常数,mj为采样点云y的当前点的单点质量,r1为单个正立方体空间的中心点与采样点云y中第j个点的距离,为方向从采样点云y中当前质点指向第c个正立方体空间的中心点的单位向量。
[0029]
优选地,步骤s300包括:
[0030]
步骤s310:获取第c个正立方体空间内采样点云x的个数,结合所述采样点云x的单点质量和所述第c个正立方体空间的恒定能量场分量,计算所述采样点云x中每个点在恒定能量场g中的受力,具体为:
[0031]
fc=gcβmi[0032]
其中,β为第c个正立方体空间内采样点云x的个数,mi为与采样点云x的单点质量,
gc为该正立方体空间的中心点的能量场分量;
[0033]
步骤s320:基于熵增定律,获取采样点云x位置以自身中心点为原点归一化后的新坐标,结合采样点云x中每个点在恒定能量场g中的受力计算对采样点云x施加的当前运动扭矩t和拉力s,具体为:
[0034][0035][0036]
其中,为采样点云x位置以自身中心点为原点归一化后的新坐标,t为运动扭矩,s为拉力,fi为采样点云x中第i个点在恒定能量场g中的受力,n为采样点云x的点云数量;
[0037]
步骤s330:根据所述采样点云x的当前运动扭矩t和拉力s,利用罗德里格斯旋转轴角变换计算当前应施加的旋转及平移(rk,tk),具体为:
[0038][0039][0040][0041][0042][0043]
tk=sk·
s/||s||
[0044]
其中,n
p
为旋转轴,θk为采样点云x围绕旋转轴n
p
的当前旋转角度,rk为当前应施加的旋转,i是3
×
3大小的单位矩阵,为当前旋转的旋转轴由3
×
1的向量表示,分别为该3
×
1的向量在x,y,z轴的坐标值,||.||为向量求模长运算,sk为平移距离步长,s/||s||为一个单位化的向量,其表示平移方向;
[0045]
每次迭代过程中旋转轴n
p
和平移方向由(t,s)直接归一化计算,旋转角度θk以及平移距离步长sk使用改良优化器控制,具体为:
[0046][0047]
其中,n为累加序号,ε为维持根号数值稳定而添加的常数。
[0048]
优选地,步骤s400具体为:
[0049][0050]
其中,n为采样点云x的点云数量,m为采样点云y的点云数量,g为万有引力常数,mi,mj分别为采样点云x与采样点云y当前点的单点质量,r2为采样点云x中第i个点与采样点云y中第j个点的距离。
[0051]
优选地,步骤s500中预设的结束条件为当当前采样点云x在引力场中的势能小于势能阈值,或者迭代次数大于预设迭代次数。
[0052]
优选地,步骤s500中根据所有变换后的点集,对源点云x进行旋转平移,实现源点云x与目标点云y之间的配准,包括:
[0053]
步骤s510:根据所有变换后的点集求解得到总旋转平移(r,t);
[0054]
步骤s520:将总旋转平移(r,t)作用于源点云x实现对源点云x的旋转平移,完成源点云x与目标点云y之间的配准。
[0055]
优选地,步骤s510具体为:
[0056][0057][0058]
其中,表示对迭代次数1到nt次记录的单次旋转rk进行矩阵乘法,表示对迭代次数1到nt次记录的单次平移tk进行矩阵加法,r表示总旋转,t表示总平移。
[0059]
上述一种基于熵增优化的大型复杂构件点云全局匹配方法,提出了一种全新的点云匹配方法体系,基于采样点云构建物理系统计算恒定能量场,基于熵增定律得到对采样点云待施加的旋转及平移,能够通过运动控制实现点云配准,极大地提升了算法的鲁棒性,并且能够应用于大尺寸多噪声的三维图像配准中,配准效果高效高精,具有极高的可用性。
附图说明
[0060]
图1为本发明一实施例提供的一种基于熵增优化的大型复杂构件点云全局匹配方法的流程图;
[0061]
图2为本发明的一种熵增优化的大型复杂构件点云全局匹配方法在运动控制迭代过程中的演示图。
具体实施方式
[0062]
为了使本技术领域的人员更好地理解本发明的技术方案,下面结合附图对本发明作进一步的详细说明。
[0063]
在一个实施例中,如图1所示,一种基于熵增优化的大型复杂构件点云全局匹配方法,方法包括如下步骤:
[0064]
步骤s100:获取相邻视角场景的三维点云坐标,获得源点云x与目标点云y,对源点云x与目标点云y进行下采样分别得到采样点云x与采样点云y。
[0065]
具体地,在本实例中,通过3d深度扫描传感器获取相邻视角场景的三维点云坐标,获得源点云x的坐标与目标点云y的坐标。
[0066]
在一个实施例中,步骤s100包括:
[0067]
步骤s110:获取相邻视角场景的三维点云坐标,获得源点云x与目标点云y;
[0068]
步骤s120:设定下采样阈值比例α%,通过对源点云x与目标点云y进行随机下采样分别得到源点云x的α%点数量的点坐标与目标点云y的α%点数量的点坐标,分别记为采样点云x与采样点云y。
[0069]
进一步地,步骤s120中设定下采样阈值比例α%具体为:
[0070]
获取任一点p0在采样点云x中的最近点ps=argmin{||ps–
p0|||ps∈x},求取点云平均点间隙d,具体为:
[0071][0072]
其中,n是采样点云x的点数;
[0073]
根据最小包围框求取采样点云x的整体尺寸d,根据整体尺寸d、点云平均点间隙d计算得到采样阈值比例,具体为:
[0074]
α%=b*d/d
[0075]
其中,b为常数。
[0076]
在本实例中,c=104。
[0077]
步骤s200:基于采样点云x与采样点云y构建物理能量模型;其中,采样点云y产生恒定的连续物理引力场,采样点云x在引力场中受力运动。
[0078]
具体地,设定点云的每一个点为质点,含有质量但不占有任何体积,避免碰撞计算,构建采样点云y产生的恒定能量场g。
[0079]
在一个实施例中,步骤s200包括:
[0080]
步骤s210:设定采样点云y的每一个点为质点,网格化以采样点云y为中心的c3个的正立方体空间,获取各单个正立方体空间的中心点与采样点云y中各点的距离,以及方向从采样点云y中一个质点指向对应各单个正立方体空间的中心点的单位向量,并结合采样点云y的点云数量和采样点云y的各单点质量构建采样点云y产生的恒定能量场g;
[0081]
步骤s220:固定采样点云y的空间位置以及恒定能量场g。
[0082]
在一个实施例中,步骤s210包括:
[0083]
网格化以所述采样点云y为中心的c3个的正立方体空间,第c个正立方体空间的恒定能量场分量具体为:
[0084][0085]
其中,m为采样点云y的点云数量,g为万有引力常数,mj为采样点云y的当前点的单点质量,r1为单个正立方体空间的中心点与采样点云y中第j个点的距离,为方向从采样
点云y中当前质点指向第c个正立方体空间的中心点的单位向量。
[0086]
具体地,c表示单个轴的分辨率,比如把一个1
×1×
1一立方米的正立方体,划分成0.1
×
0.1
×
0.1大小的10*10*10个立方体,就是c=10。这一步是为了减少计算量,每个小块立方体的多个点可以当成一个点算。
[0087]
步骤s300:基于熵增定律,根据物理能量模型计算对采样点云x的当前运动的扭矩t和拉力s,根据扭矩t和拉力s计算当前施加的旋转及平移(rk,tk),获得变换后的点集。
[0088]
具体地,基于熵增定律,物体总从能量高的位置向能量低的位置运动,计算对采样点云x的当前运动扭矩t和拉力s。进一步地,变换后的点集=ri*变换前的点集 ti。
[0089]
在一个实施例中,步骤s300包括:
[0090]
步骤s310:获取第c个正立方体空间内采样点云x的个数,结合所述采样点云x的单点质量和所述第c个正立方体空间的恒定能量场分量,计算所述采样点云x中每个点在恒定能量场g中的受力,具体为:
[0091]
fc=gcβmi[0092]
其中,β为第c个正立方体空间内采样点云x的个数,mi为与采样点云x的单点质量,gc为该正立方体空间的中心点的能量场分量;
[0093]
步骤s320:基于熵增定律,获取采样点云x位置以自身中心点为原点归一化后的新坐标,结合采样点云x中每个点在恒定能量场g中的受力计算对采样点云x施加的当前运动扭矩t和拉力s,具体为:
[0094][0095][0096]
其中,为采样点云x位置以自身中心点为原点归一化后的新坐标,t为运动扭矩,s为拉力,fi为采样点云x中第i个点在恒定能量场g中的受力,n为采样点云x的点云数量;
[0097]
步骤s330:根据所述采样点云x的当前运动扭矩t和拉力s,利用罗德里格斯旋转轴角变换计算当前应施加的旋转及平移(rk,tk),具体为:
[0098][0099][0100][0101][0102][0103]
tk=sk·
s/||s||
[0104]
其中,n
p
为旋转轴,θk为采样点云x围绕旋转轴n
p
的当前旋转角度,rk为当前应施加的旋转,i是3
×
3大小的单位矩阵,为当前旋转的旋转轴由3
×
1的向量
表示,分别为该3
×
1的向量在x,y,z轴的坐标值,||.||为向量求模长运算,sk为平移距离步长,s/||s||为一个单位化的向量,其表示平移方向;
[0105]
每次迭代过程中旋转轴n
p
和平移方向由(t,s)直接归一化计算,旋转角度θk以及平移距离步长sk使用改良优化器控制,具体为:
[0106][0107]
其中,n为累加序号,ε为维持根号数值稳定而添加的常数。
[0108]
具体地,所有的gi分量工程组成g,ε一般取10-6
。
[0109]
步骤s400:分别获取采样点云x与采样点云y的点云数量、当前采样点云x、当前采样点云y的单点质量,以及当前采样点云x与当前采样点云y间的距离,计算当前采样点云x在引力场中的势能并记录当前迭代次数。
[0110]
在一个实施例中,步骤s400具体为:
[0111][0112]
其中,n为采样点云x的点云数量,m为采样点云y的点云数量,g为万有引力常数,mi,mj分别为采样点云x与采样点云y当前点的单点质量,r为采样点云x中第i个点与采样点云y中第j个点的距离,r的下界为10^(-6)。
[0113]
步骤s500:根据势能或迭代次数确定满足预设的结束条件,累计所有变换后的点集,根据所有变换后的点集,对源点云x进行旋转平移,实现源点云x与目标点云y之间的配准。
[0114]
在一个实施例中,步骤s500中预设的结束条件为当当前采样点云x在引力场中的势能小于势能阈值,或者迭代次数大于预设迭代次数。
[0115]
点云配准的演示图如图2所示,在一个实施例中,步骤s500中根据所有变换后的点集,对源点云x进行旋转平移,实现源点云x与目标点云y之间的配准,包括:
[0116]
步骤s510:根据所有变换后的点集求解得到总旋转平移(r,t);
[0117]
步骤s520:将总旋转平移(r,t)作用于源点云x实现对源点云x的旋转平移,完成源点云x与目标点云y之间的配准。
[0118]
在一个实施例中,步骤s510具体为:
[0119]
[0120][0121]
其中,表示对迭代次数1到nt次记录的单次旋转rk进行矩阵乘法,表示对迭代次数1到nt次记录的单次平移tk进行矩阵加法,r表示总旋转,t表示总平移。
[0122]
进一步地,步骤s500还包括:根据势能或迭代次数确定不满足预设的结束条件时,返回步骤s300。
[0123]
本发明的理论是基于熵增定律下的物理系统运动全局模型匹配方法,在初始的预处理后,针对的大型复杂异形曲面上的点特征高度相似,难以辨认,将点云图像建模成孤立的物理能量系统,这种情况,物体必然从能力高(势能高)到能量低位置运动,保证算法的全局收敛性(由于系统引力势能最低点是唯一的,因此在系统收敛在最优点时,建模物体所代表的点云数据也完成了配准)。
[0124]
该方法摆脱了传统点云配准方法体系的困扰,不再需要处理特征高度、噪点影响等类似的情况,利用能力转移物理系统的特性实现配准,在多种模型配准中都能取得不错的效果,尤其是大型复杂异形曲面这种其他方法难以取得优势的模型中。
[0125]
进一步地,调整下采样阈值α%至100%,表示完整的源点云参与优化,其能够更好的提高算法精度。同时调整下采样阈值α%至5%以下,也能实现不错的点云粗配准效果,可结合相应的精配准算法完成最终配准。
[0126]
该方法通过获取不同视角的三维点云图像,将其建模成由质点构成的刚性物理构型,并由此构建物理系统模型,将点云配准问题建模成系统的能量优化模型。能够脱离传统的点云配准问题建模,也能舍弃掉传统配准模型遇到的噪声、离群点以及处理尺度限制等一系列问题。该模型由中心参考模型与运动匹配模型构成:中心参考模型产生恒定不变的引力场,此时运动匹配模型在该引力场的牵引下运动,在熵增定律的保证下,结合运动控制方法,使系统逼近最优的点云配准结果。提出一种全新的点云匹配方法体系,通过构建物理刚性运动系统,能够通过运动控制实现点云配准,极大地提升了算法的鲁棒性,并且能够应用于大尺寸多噪声的三维图像配准中,配准效果高效高精,具有极高的可用性。
[0127]
通过引入熵增优化的物理模型,使得算法本身自发的向最优配准点收敛,在能够更好的实现高精度、大尺度检测的同时,以提出的全新的迭代运动控制方法大大提高了算法理论的可行性,使算法能够针对大型复杂异性曲面工件进行加工,提高了配准精度与鲁棒性,降低方法的失败率。
[0128]
以上对本发明所提供的一种基于熵增优化的大型复杂构件点云全局匹配方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
