1.本发明涉及丝印设备技术领域,尤其涉及一种双工位全自动丝印机。
背景技术:
2.随着全自动丝网印刷技术的日益成熟和发展,产业规模的逐步壮大,全自动丝网印刷技术的应用领域正在不断扩大。目前,全自动丝网印刷机专注于硬式材质高精度的印刷,如视窗玻璃、工业玻璃、pmma、ogs、tol等的印刷,其主要的应用领域有:it视窗玻璃、工业玻璃、太阳能晶硅电池、pcb线路板、液晶显示屏、触控面板和各类触摸屏。全自动丝网印刷技术利用更为先进的加工工艺和技术,使丝印过程更为精确、速度更快、自动化程度更高。
3.就目前而言,丝印机均为单工位丝印机,即一台丝印机一次只能印刷一块物料,对于企业而言,提高生丝印的产效率无疑是要增加丝印机的数量和对应人员,但是,增加丝印机的数量和人员则意味着增加生产成本,这对于刚刚起步的小企业而言是无疑一个具备风险的抉择,如何既提高丝印效率又减少人工成本则成为了小企业迫切需要解决的问题。
4.为此,有必要提出一种双工位全自动丝印机来解决上述问题。
技术实现要素:
5.为了解决上述问题,本发明提出一种双工位全自动丝印机来解决上述问题。
6.本发明通过以下技术方案实现的:
7.本发明提出一种双工位全自动丝印机,包括机架、操控面板、两个上料机构、两个吸附机械手、两个丝印平台、直线电机、印刷组件、卸料装置,所述操控面板固定连接于所述机架上,所述机架两侧对称设有两个第一支撑台和两个第二支撑台,两个所述上料机构分别固定连接于两个所述第一支撑台上表面,所述直线电机横跨并固定连接于两个所述第二支撑台上,两个所述丝印平台分别滑动连接于所述直线电机两端,两个所述吸附机械手分别固定连接于所述机架内并分别位于两个所述上料机构上方,所述印刷组件固定连接于所述机架内并位于两个所述第二支撑平台之间且位于所述直线电机上方,所述卸料装置固定连接于所述机架内并延伸出所述机架后方,所述操控面板分别与两个所述上料机构、两个所述丝印平台、两个所述吸附机械手、所述直线电机、所述印刷组件、所述卸料装置电连接,所述直线电机错开带动两个所述丝印平台朝向所述印刷组件滑动,从而使得所述印刷组件能够无间断地分别对两个所述丝印平台上的物料进行丝印。
8.进一步的,所述上料机构包括支撑架、驱动装置、升降平台、若干距离传感器,所述支撑架固定连接于所述第一支撑台上表面,所述驱动装置固定连接于所述支撑架内并与所述第一支撑台垂直,所述升降平台与所述支撑架滑动连接,若干所述距离传感器分别固定连接于所述支撑架顶端。
9.进一步的,所述支撑架上设有若干遮挡板,若干所述遮挡板均贯穿所述升降平台并形成一个放置区域,若干所述距离传感器分别与若干所述遮挡板一一对应并固定连接于
所述遮挡板顶端。
10.进一步的,所述丝印平台包括吸附盘、纠正机构,所述吸附盘固定连接于所述纠正机构上方,所述纠正机构与所述直线电机滑动连接。
11.进一步的,所述纠正机构下方两侧设有滑块,所述直线电机两侧设有第一滑轨,所述滑块与所述第一滑轨滑动连接。
12.进一步的,所述机架内设有中央支撑台,所述印刷组件固定连接于所述中央支撑台上。
13.进一步的,所述双工位全自动丝印机包括两个摄像模组,两个所述摄像模组分别固定连接于所述机架内并分别位于两个所述丝印平台上方且朝向所述丝印平台。
14.进一步的,所述摄像模组包括第一固定架、三个摄像头,所述第一固定架固定连接于所述机架内,三个所述摄像头分别固定连接于所述第一固定架下方并朝向所述丝印平台且三个所述摄像头的连线所形成的图形为直角三角形。
15.进一步的,所述卸料装置包括第二固定架、两个卸料吸附臂,所述第二固定架固定连接于所述机架内并延伸出所述机架后方,两个所述卸料吸附臂分别滑动连接于所述第二固定架上并朝向下方。
16.进一步的,所述第二固定架上设有两个第二滑轨,两个所述卸料吸附臂分别与两个所述第二滑轨一一对应并滑动连接。
17.本发明的有益效果:
18.本发明提出的一种双工位全自动丝印机,包括机架、操控面板、两个上料机构、两个吸附机械手、两个丝印平台、直线电机、印刷组件、卸料装置,工人在操控本发明运作时,分别将物料放置在两个上料机构上,然后物料分别通过两个吸附机械手吸附至两个丝印平台上,然后直线电机则错开带动两个丝印平台朝向印刷组件滑动,从而使得印刷组件能够无间断地分别对两个丝印平台上的物料进行丝印,进而提高了物料的丝印速率;综上所述,本发明在一个人操作机器的情况下能够对两个物料进行丝印,提高了产线的生产效率,同时也减少了企业的生产人工成本,有利于企业的稳步快速发展。
附图说明
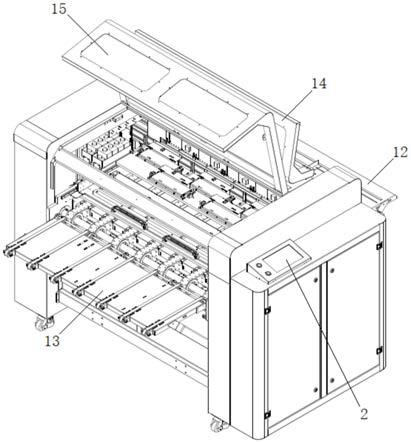
19.图1为本发明的双工位全自动丝印机的内部示意图;
20.图2为本发明的双工位全自动丝印机的整体示意图;
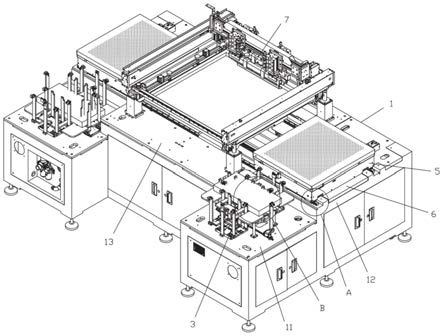
21.图3为本发明的双工位全自动丝印机的主视图;
22.图4为本发明的双工位全自动丝印机的摄像模组示意图;
23.图5为本发明的双工位全自动丝印机的丝印平台示意图;
24.图6为图1标号a的局部放大示意图;
25.图7为图1标号b的局部放大示意图;
26.图8为图2标号c的局部放大示意图。
具体实施方式
27.为了更加清楚完整的说明本发明的技术方案,下面结合附图对本发明作进一步说明。
28.请参考图1-图8,本发明提出一种双工位全自动丝印机,包括机架1、操控面板2、两个上料机构3、两个吸附机械手4、两个丝印平台5、直线电机6、印刷组件7、卸料装置8,操控面板2固定连接于机架1上,机架1两侧对称设有两个第一支撑台11和两个第二支撑台12,两个上料机构3分别固定连接于两个第一支撑台11上表面,直线电机6横跨并固定连接于两个第二支撑台12上,两个丝印平台5分别滑动连接于直线电机6两端,两个吸附机械手4分别固定连接于机架1内并分别位于两个上料机构3上方,印刷组件7固定连接于机架1内并位于两个第二支撑平台12之间且位于直线电机6上方,卸料装置8固定连接于机架1内并延伸出机架1后方,操控面板2分别与两个上料机构3、两个丝印平台5、两个吸附机械手4、直线电机6、印刷组件7、卸料装置8电连接,直线电机6错开带动两个丝印平台5朝向印刷组件7滑动,从而使得印刷组件7能够无间断地分别对两个丝印平台5上的物料进行丝印。
29.在本实施方式中:
30.机架1用于为操控面板2、两个上料机构3、两个吸附机械手4、两个丝印平台5、直线电机6、印刷组件7、卸料装置8提供一个稳固的支撑结构;
31.第一支撑台11共有2个,均用于为上料机构3提供一个稳固的支撑结构;
32.第二支撑台12共有2个,均用于为直线电机6提供一个稳固的支撑结构;
33.操控面板2用于为工人提供一个操控本发明运作的控制位置,其内部设有电路板,电路板上设有驱动模块、影像处理模块、数据处理模块,数据处理模块分别与驱动模块、影像处理模块电连接,驱动模块分别与上料机构3、吸附机械手4、丝印平台5、直线电机6、印刷组件7、卸料装置8电连接,影像处理模块与摄像模组9电连接;
34.上料机构3用于放置成叠的物料;
35.吸附机械手4用于吸附上料机构3上的物料;
36.丝印平台5用于承载被吸附机械手4所搬运过来的物料;
37.直线电机6用于带动丝印平台5水平滑动;
38.印刷组件7用于对移动过来的丝印平台5上的物料进行丝印;
39.卸料装置8用于将丝印好的物料吸附并卸下至机架1后方的物料盘内;
40.具体的,工人在操控本发明运作时,分别将物料放置在两个上料机构3上,然后物料分别通过两个吸附机械手4吸附至两个丝印平台5上,然后直线电机6则错开带动两个丝印平台5朝向印刷组件7滑动,从而使得印刷组件7能够无间断地分别对两个丝印平台5上的物料进行丝印,进而提高了物料的丝印速率;
41.综上所述,本发明在一个人操作机器的情况下能够对两个物料进行丝印,提高了产线的生产效率,同时也减少了企业的生产人工成本,有利于企业的稳步快速发展。
42.进一步的,上料机构3包括支撑架31、驱动装置、升降平台32、若干距离传感器33,支撑架31固定连接于第一支撑台11上表面,驱动装置固定连接于支撑架31内并与第一支撑台11垂直,升降平台32与支撑架31滑动连接,若干距离传感器33分别固定连接于支撑架31顶端;支撑架31上设有若干遮挡板311,若干遮挡板311均贯穿升降平台32并形成一个放置区域,若干距离传感器33分别与若干遮挡板311一一对应并固定连接于遮挡板311顶端。
43.在本实施方式中:
44.支撑架31用于为驱动装置、距离传感器33、升降平台32提供一个稳固的支撑结构;
45.遮挡板311用于为距离传感器33提供一个稳固的固定结构,同时多个遮挡板311也
形成了一个物料的放置区域,为物料提供了一个确定的放置位置;
46.驱动装置为步进电机,其转轴上设有丝杆,用于带动升降平台32升降;
47.升降平台32用于带动成叠的物料进行上升;
48.距离传感器33,为红外距离传感器用于检测最上方物料的位置,进而判断出物料是否被吸附机械手4成功吸附;
49.具体的,在成叠的物料放置在多个遮挡板311所形成的放置区域后,驱动装置带动升降平台32进行上升,在距离传感器33被物料遮挡时,吸附机械手4则将最上层的物料进行吸附并搬运至丝印平台5上放置。
50.进一步的,丝印平台5包括吸附盘51、纠正机构52,吸附盘51固定连接于纠正机构52上方,纠正机构52与直线电机6滑动连接;纠正机构52下方两侧设有滑块521,直线电机6两侧设有第一滑轨61,滑块521与第一滑轨61滑动连接。
51.在本实施方式中:
52.吸附盘51用于将吸附机械手4所放下来的物料进行吸附固定;
53.纠正机构52用于将吸附盘51上的物料进行纠正,其配合摄像模组9进行使用,在物料未摆正时,即待丝印的物料与印刷组件7的丝印区域存在角度偏差时,纠正机构52则将物料进行摆正,纠正机构52内设有电机、放置架、摆正盘,吸附盘51固定连接于摆正盘上方,电机通过丝杆与摆正盘的第一转动位进行丝杆连接,摆正盘的第二转动位则与放置架转动连接,电机的转动能够带动摆正盘的小幅度转动,进而将物料摆正;
54.滑块521用于为纠正机构52提供一个与直线电机6滑动连接的结构;
55.第一滑轨61用于为直线电机6提供一个与丝印平台5滑动连接的结构。
56.进一步的,机架1内设有中央支撑台13,印刷组件7固定连接于中央支撑台13上。
57.在本实施方式中:
58.中央支撑台13用于为印刷组件7提供一个支撑的结构,中央支撑台13位于两个第二支撑平台12之间。
59.进一步的,双工位全自动丝印机包括两个摄像模组9,两个摄像模组9分别固定连接于机架1内并分别位于两个丝印平台5上方且朝向丝印平台5;摄像模组9包括第一固定架91、三个摄像头92,第一固定架91固定连接于机架1内,三个摄像头92分别固定连接于第一固定架91下方并朝向丝印平台5且三个摄像头92的连线所形成的图形为直角三角形。
60.在本实施方式中:
61.摄像模组9用于获取丝印平台5上的物料影像;
62.第一固定架91用于为摄像头92提供一个稳固的支撑结构;
63.摄像头92共有6个,每个摄像模组9有3个,用于拍摄丝印平台5上的物料影像。
64.进一步的,卸料装置8包括第二固定架81、两个卸料吸附臂82,第二固定架81固定连接于机架1内并延伸出机架1后方,两个卸料吸附臂82分别滑动连接于第二固定架81上并朝向下方;第二固定架81上设有两个第二滑轨811,两个卸料吸附臂82分别与两个第二滑轨811一一对应并滑动连接。
65.在本实施方式中:
66.第二固定架81用于为卸料吸附臂82提供一个支撑的结构;
67.第二滑轨811用于为卸料吸附臂82提供一个滑动的支撑结构;
68.卸料吸附臂82共有2个,均用于将丝印好的物料吸附并搬运出外部,其工作过程为:一个丝印平台5对应一个卸料吸附臂82,当丝印平台5从印刷组件7移出时,对应的卸料吸附臂82则将移出的丝印平台5上的物料吸附并移出外部,这样则能够无间断地对丝印好的物料进行搬运。
69.当然,本发明还可有其它多种实施方式,基于本实施方式,本领域的普通技术人员在没有做出任何创造性劳动的前提下所获得其他实施方式,都属于本发明所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。