1.本发明涉及拖网渔具技术领域,具体地,涉及一种网囊物理模型的建模方法。
背景技术:
2.拖网在海洋渔业中发挥着重要作用,其产量占世界捕捞总产量的40%以上,是渔业中最为广泛和高效的捕捞技术。提高捕鱼效率和选择性能,并减少网具阻力,降低能耗是开发设计拖网渔具的目标。拖网渔具的网衣按装配部分可分为网翼、网盖、网身、网囊等。网囊位于渔具最后部分,是拖网渔具的重要组成部分,它不仅起积聚渔获物的作用部分,也是发生选择性的主要位置。研究发现,网囊中鱼类的逃逸现象80%发生在网囊头端及网囊末端,网囊周围存在湍流边界层、涡流和尾迹流,这些对网囊的选择性、阻力和稳定性有显著影响。由于局部水动力效应(波动速度、涡旋脱落尾流等),曳纲张力的变化、网具结构本身的运动以及网具的几何形状、结构均会导致网囊发生振荡现象。网囊的结构属性对网囊选择性和水动力性能有很大影响。如网目形状、网目大小、网线粗细、网囊剪裁斜率均会改变网囊水动力特性和周围流场,从而影响鱼类行为和捕捞效率。
3.目前对网囊的研究方法多是采用模型试验和piv技术(粒子图像测速技术)。通过利用不同结构的网衣制作成模型网囊,然后在水槽中试验、观察和测量。随着计算机技术的发展,数值模拟方法被广泛应用到渔具上。相对模型试验,计算机数值模拟高效、成本小、可控性强,能够准确获取和描述网囊水动力性能、周围流场分布,从而更好地设计、改善网囊的水动力性能。对于网具模型的设计,有学者利用多孔介质模型方法模拟平面网片周围流态或基于质点弹簧系统和牛顿力学的柔性有限元法,利用能量守恒模型模拟网具在水下的形状和张力分布,但对于构建网囊物理模型还没有一个有效的方法。
技术实现要素:
4.针对现有图像隐私保护技术中存在的上述缺陷,本发明的目的在于提供一种利用建模软件对网囊模型进行构建的网囊物理模型的建模方法。
5.为解决上述问题,本发明的技术方案为:
6.一种网囊物理模型的建模方法,所述方法包括以下步骤:
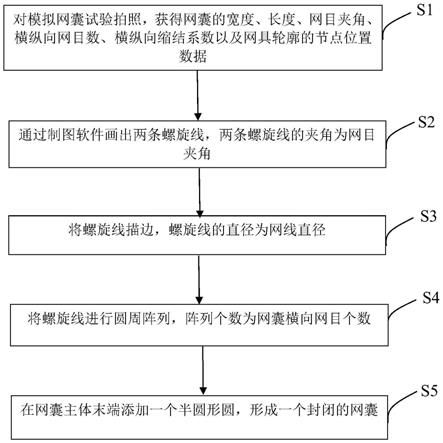
7.对模拟网囊试验拍照,获得网囊的宽度、长度、网目夹角、横纵向网目数、横纵向缩结系数以及网具轮廓的节点位置数据;
8.通过制图软件画出两条螺旋线,两条螺旋线的夹角为网目夹角;
9.将螺旋线描边,螺旋线的直径为网线直径;
10.将螺旋线进行圆周阵列,阵列个数为网囊横向网目个数;以及
11.在网囊主体末端添加一个半圆形圆,形成一个封闭的网囊。
12.可选地,所述对模拟网囊试验拍照,获得网囊的宽度、长度、网目夹角、横纵向网目数、横纵向缩结系数以及网具轮廓的节点位置数据的步骤具体包括:可根据实物网囊横纵向网目数、横纵向缩结系数,求出螺纹曲线的直径、螺距,螺旋线个数,制作出1:1的网囊物
理模型,公式为:
[0013][0014][0015]
nt
×
et
×
2a=πd
[0016]
nn
×
en
×
2a=h
[0017][0018][0019]
l2=(πd)2 h2[0020][0021]
其中,为螺旋角,θ为网目夹角,d为螺纹直径或网囊宽度,h为螺距或网囊长度,l为螺纹曲线长度,a为网目长度,n
t
、nn分别为横纵向网目数,e
t
、en分别为横纵向缩结系数。
[0022]
可选地,所述通过制图软件画出两条螺旋线,两条螺旋线的夹角为网目夹角的步骤具体包括:通过制图软件solidworks或cad,画出两条直径为d,长度为h的螺旋线。
[0023]
可选地,所述在网囊主体末端添加一个半圆形圆,形成一个封闭的网囊的步骤具体包括:将网囊主体末端添加一个半圆形圆,半圆直径为d,使用圆周阵列的方法构造,形成一个封闭的网囊。
[0024]
可选地,所述在网囊主体末端添加一个半圆形圆,形成一个封闭的网囊的步骤具体还包括:在solidworks或ansys软件中将网囊材料定义为pe或pa材料,然后用于网具数值模拟中。
[0025]
与现有的技术相比,本发明网囊物理模型的建模方法利用建模软件对网囊模型进行构建,可根据试验要求,构建不同网目尺寸、网线直径、网目夹角、网目缩结系数的网囊,为今后利用cfd软件探究网囊水动力性能,对其网具性能变化规律提供技术支持。
附图说明
[0026]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0027]
图1为本发明实施例提供的网囊几何模型图;
[0028]
图2为本发明实施例提供的螺旋线与网目之间的关系示意图;
[0029]
图3为本发明实施例提供的网囊物理模型的建模方法流程框图。
具体实施方式
[0030]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0031]
具体地,如图1和图2所示,网囊在无渔获物条件下可被假设为一个简单圆柱体,外边由网衣包裹,将网囊网目数量集群化,最终一个网目由四根螺旋曲线交叉而成,网囊末端可用半圆补充。因此,网囊是由n条螺旋线相互交叉缠绕而成,网目的大小、夹角、缩结系数是由螺距、螺旋角和螺纹直径决定。
[0032]
可根据要求实物网囊横纵向网目数、缩结系数求出螺纹曲线的直径、螺距,螺旋线个数,制作出1:1的网囊物理模型,公式为:
[0033][0034][0035]
nt
×
et
×
2a=πd
ꢀꢀꢀ
(3)
[0036]
nn
×
en
×
2a=h
ꢀꢀꢀ
(4)
[0037][0038][0039]
l2=(πd)2 h2ꢀꢀꢀ
(7)
[0040][0041]
上述公式中,为螺旋角,θ为网目夹角,d为螺纹直径或网囊宽度,h为螺距或网囊长度,l为螺纹曲线长度,a为网目长度,n
t
、nn分别为横纵向网目数,e
t
、en分别为横纵向缩结系数。
[0042]
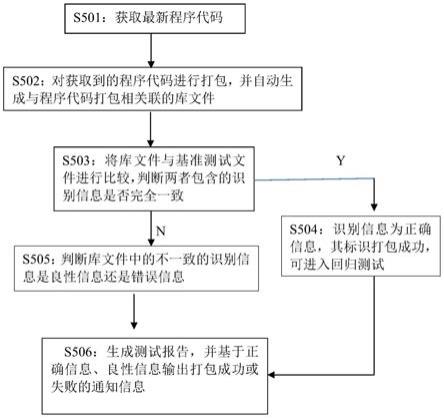
构建网囊物理模型,须有如下假设:网囊近似看作圆柱体,外边由网衣包裹,目脚由圆柱体代表有捻度的单股网线。图3为本发明实施例提供的网囊物理模型的建模方法流程框图,如图3所示,所述方法包括以下步骤:
[0043]
s1:对模拟网囊试验拍照,获得网囊的宽度、长度、网目夹角、横纵向网目数、横纵向缩结系数以及网具轮廓的节点位置数据;
[0044]
具体地,对模拟网囊试验拍照,然后进行视觉矫正,获得网囊的宽度d、长度h、网目夹角θ、横纵向网目数n
t
、nn、横纵向缩结系数e
t
、en以及网具轮廓的节点位置数据。
[0045]
由于图片处理只能获得二维坐标,因此需要设置两台摄像机从不同方位进行拍摄,在本实施例中,设置为俯视拍摄和正视拍摄,通过不同角度拍摄的图片能够得到网囊的三维坐标,同时,为了获得同一时刻某节点的三维坐标,拍摄时需协同工作。
[0046]
在立体摄像过程中存在很多误差,图像解析需要考虑这些误差并进行矫正,通常误差的主要来源为:
[0047]
1、镜头成像的畸变问题:这与相机镜头的制造工艺有关,变形和失真的程度也与镜头质量有关;
[0048]
2、水的折射:光线从一种介质传播到另一种介质中光线发生偏折的现象。
[0049]
3、视差:立体物的摄像中,由于三维的空间结构被转换为二维平面,导致离相机近投影面的图像大与远投影平面。
[0050]
s2:通过制图软件画出两条螺旋线,两条螺旋线的夹角为网目夹角;
[0051]
具体地,通过制图软件solidworks、cad等,画出两条直径为d,长度为h的螺旋线,
两条螺旋线的夹角为网目夹角,此时与实际网囊轮廓相同。
[0052]
s3:将螺旋线描边,螺旋线的直径为网线直径;
[0053]
s4:将螺旋线进行圆周阵列,阵列个数为网囊横向网目个数;
[0054]
此时,网目为菱形,网囊的主体部分构建完成。
[0055]
s5:在网囊主体末端添加一个半圆形圆,形成一个封闭的网囊。
[0056]
具体地,将网囊主体末端添加一个半圆形圆,半圆直径为d,使用圆周阵列的方法构造,形成一个封闭的网囊,此时网囊的网目特征及网囊结构与模型网相同。在solidworks或ansys软件中将网囊材料定义为pe或pa材料,然后用于网具数值模拟中。通过本发明的网囊物理模型的建模方法,可根据试验要求,构建不同网目尺寸、网线直径、网目夹角、网目缩结系数的网囊。
[0057]
与现有的技术相比,本发明网囊物理模型的建模方法利用建模软件对网囊模型进行构建,可根据试验要求,构建不同网目尺寸、网线直径、网目夹角、网目缩结系数的网囊,为今后利用cfd软件探究网囊水动力性能,对其网具性能变化规律提供技术支持。
[0058]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。