技术特征:
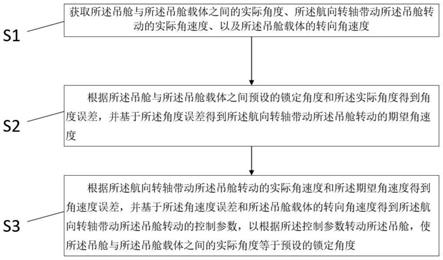
1.一种吊舱航向角度锁定控制方法,其特征在于,应用于吊舱载体,所述吊舱载体通过航向电机连接吊舱,所述航向电机带动所述吊舱转动,以通过控制所述航向电机使所述吊舱与所述吊舱载体之间的角度保持锁定,所述控制方法包括:获取所述吊舱与所述吊舱载体之间的实际角度、所述航向电机带动所述吊舱转动的实际角速度、以及所述吊舱载体的转向角速度;根据所述吊舱与所述吊舱载体之间预设的锁定角度和所述实际角度得到角度误差,并基于所述角度误差得到所述航向电机带动所述吊舱转动的期望角速度;根据所述航向电机带动所述吊舱转动的实际角速度和所述期望角速度得到角速度误差,并基于所述角速度误差和所述吊舱载体的转向角速度得到所述航向电机带动所述吊舱转动的控制参数,以根据所述控制参数转动所述吊舱,使所述吊舱与所述吊舱载体之间的实际角度等于预设的锁定角度。2.根据权利要求1所述一种吊舱航向角度锁定控制方法,其特征在于,所述基于所述角度误差得到所述航向电机带动所述吊舱转动的期望角速度,包括:设置均包括角度误差分界阈值和所述角度误差的第一函数和第二函数,当所述角度误差大于所述角度误差分界阈值时,按照所述第一函数计算所述期望加速度;当所述角速度误差小于所述角度误差分界阈值时,按照所述第二函数计算所述期望加速度;其中,按照所述第一函数计算得到的期望加速度大于按照所述第二函数计算得到的期望加速度,并且所述第一函数随所述角度误差单调递增,所述第二函数随所述角度误差单调递减。3.根据权利要求1所述一种吊舱航向角度锁定控制方法,其特征在于,所述第一函数和所述第二函数均设置第一调整比例系数。4.根据权利要求1所述一种吊舱航向角度锁定控制方法,其特征在于,基于所述角速度误差和所述吊舱载体的转向角速度得到所述航向电机带动所述吊舱转动的控制参数,包括:获取所述角速度误差微分以及所述吊舱载体的转向角速度微分;基于所述角速度误差、所述角速度误差微分以及所述吊舱载体的转向角速度微分构建第三函数,根据所述第三函数计算所述航向电机带动所述吊舱转动的控制参数。5.根据权利要求1所述一种吊舱航向角度锁定控制方法,其特征在于,所述第三函数还设置所述角速度误差的第二调整比例系数、所述角速度误差微分的第三调整比例系数、以及所述吊舱载体的转向角速度微分的第四调整比例系数。6.根据权利要求1所述一种吊舱航向角度锁定控制方法,其特征在于,通过以下方式确定所述角度误差分界阈值、所述第一调整比例系数、所述第二调整比例系数、所述第三调整比例系数和所述第四调整比例系数:改变所述吊舱与所述吊舱载体之间预设的锁定角度以及所述吊舱载体的转向角速度;按照所述第一函数、所述第二函数、所述第三函数计算所述航向电机带动所述吊舱转动的控制参数,以根据所述控制参数转动所述吊舱,并得到所述吊舱与所述吊舱载体之间的实际角度和时间的变化曲线;基于所述变化曲线确定所述角度误差分界阈值、所述第一调整比例系数、所述第二调整比例系数、所述第三调整比例系数和所述第四调整比例系数。
7.根据权利要求3所述一种吊舱航向角度锁定控制方法,其特征在于,通过角度传感器获取所述吊舱与所述吊舱载体之间的实际角度;通过角速度传感器获取所述航向电机带动所述吊舱转动的实际角速度、以及所述吊舱载体的转向角速度。8.一种吊舱航向角度锁定控制装置,其特征在于,应用于吊舱载体,所述吊舱载体通过航向电机连接吊舱,所述航向电机带动所述吊舱转动,以通过控制所述航向电机使所述吊舱与所述吊舱载体之间的角度保持锁定,所述控制装置包括:获取模块,用于获取所述吊舱与所述吊舱载体之间的实际角度、所述航向电机带动所述吊舱转动的实际角速度、以及所述吊舱载体的转向角速度;第一计算模块,用于根据所述吊舱与所述吊舱载体之间预设的锁定角度和所述实际角度得到角度误差,并基于所述角度误差得到所述航向电机带动所述吊舱转动的期望角速度;第二计算模块,用于根据所述航向电机带动所述吊舱转动的实际角速度和所述期望角速度得到角速度误差,并基于所述角速度误差和所述吊舱载体的转向角速度得到所述航向电机带动所述吊舱转动的控制参数,以根据所述控制参数转动所述吊舱,使所述吊舱与所述吊舱载体之间的实际角度等于预设的锁定角度。9.一种电子设备,其特征在于,包括处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行权利要求1至7任一项所述的吊舱航向角度锁定控制方法的步骤。10.一种计算机可读存储介质,其特征在于:该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行权利要求1至7任一项所述的吊舱航向角度锁定控制方法的步骤。
技术总结
本申请提供了一种吊舱航向角度锁定控制方法、装置、设备及存储介质,涉及吊舱控制技术领域,通过获取吊舱与吊舱载体之间的实际角度、航向电机带动吊舱转动的实际角速度、以及吊舱载体的转向角速度;根据吊舱与吊舱载体之间预设的锁定角度和实际角度得到角度误差,并基于角度误差得到航向电机带动吊舱转动的期望角速度;根据航向电机带动吊舱转动的实际角速度和期望角速度得到角速度误差,并基于角速度误差和吊舱载体的转向角速度得到航向电机带动吊舱转动的控制参数,以根据控制参数转动吊舱,从而能够解决吊舱在角度锁定中,由于吊舱载体的转动等干扰导致的锁定偏差大的问题,以及减小控制中的超调现象。以及减小控制中的超调现象。以及减小控制中的超调现象。
技术研发人员:谭程元
受保护的技术使用者:重庆市亿飞智联科技有限公司
技术研发日:2022.02.25
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。