技术特征:
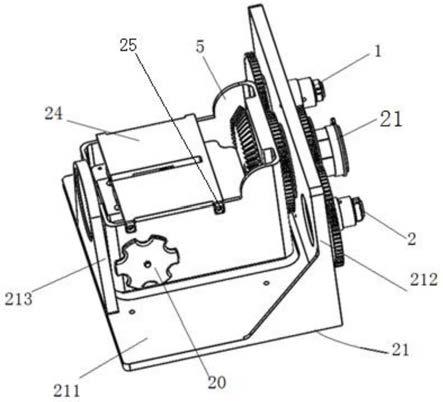
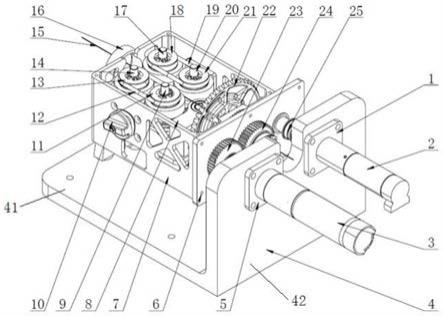
1.一种用于导管的运动控制装置,包括第一齿轮组、第二齿轮组以及输送轮组,其特征在于,在所述输送轮组中设置安装槽以夹紧所述导管,其中,所述第一齿轮组用于带动所述输送轮组中的所述导管旋转运动,所述第二齿轮组通过锥齿轮组与第三齿轮组连接,所述第三齿轮组用于带动所述输送轮组中的所述导管沿直线往复运动。2.根据权利要求1所述的运动控制装置,其特征在于,包括支撑架,所述支撑架包括底板、第一侧板和第二侧板,所述第一侧板和所述第二侧板分别在所述底板的相对两个侧面并且垂直于所述底板设置,所述第一齿轮组和所述第二齿轮组设置在所述第一侧板上,在所述第一侧板和所述第二侧板之间设置用于控制所述导管实现旋转运动的导管外筒,所述导管外筒与所述第一齿轮组连接,所述锥齿轮组设置在所述导管外筒内,所述锥齿轮组的一端与所述第二齿轮组连接,其另一端与第三齿轮组连接,所述第三齿轮组与输送轮组传动连接。3.根据权利要求2所述的运动控制装置,其特征在于,在所述第一侧板和所述第二侧板之间设置第三驱动轴,所述导管外筒与所述第一齿轮组套设在所述第三驱动轴上。4.根据权利要求2所述的运动控制装置,其特征在于,所述导管外筒包括下部支撑板,在所述下部支撑板上设置环绕的侧壁,在所述下部支撑板上设置导管支撑板,在所述侧壁上盖设导管上盖板。5.根据权利要求4所述的运动控制装置,其特征在于,在所述导管上盖板的边缘处设置固定装置,所述导管上盖板通过所述固定装置设置在所述侧壁上。6.根据权利要求5所述的运动控制装置,其特征在于,所述第三齿轮组设置在所述下部支撑板和所述导管支撑板之间形成的空间中。7.根据权利要求3所述的运动控制装置,其特征在于,所述第一齿轮组包括第一驱动轴,所述第一驱动轴与导管旋转电机相连接,在所述第一驱动轴上套设第一齿轮,所述第一齿轮与第二齿轮相啮合,所述第二齿轮与所述导管外筒通过第三驱动轴相连接。8.根据权利要求7所述的运动控制装置,其特征在于,所述第一齿轮和所述第二齿轮设置在所述第一侧板的内侧。9.根据权利要求7所述的运动控制装置,其特征在于,所述第二齿轮组包括第二驱动轴,所述第二驱动轴与导管推进电机相连接,在所述第二驱动轴上套设第三齿轮,所述第三齿轮与第四齿轮相啮合。10.根据权利要求9所述的运动控制装置,其特征在于,所述第三齿轮和所述第四齿轮设置在所述第一侧板的外侧。11.根据权利要求9所述的运动控制装置,其特征在于,所述锥齿轮组包括相互啮合的垂直锥齿轮和水平锥齿轮,所述垂直锥齿轮靠近所述第一侧板设置并通过第一连接轴与所述第四齿轮同轴连接。12.根据权利要求9所述的运动控制装置,其特征在于,在所述水平锥齿轮的输出侧设置第二连接轴,所述水平锥齿轮通过所述第二连接轴与所述第三齿轮组传动连接。13.根据权利要求12所述的运动控制装置,其特征在于,所述第三齿轮组包括第五齿轮和第七齿轮,所述第五齿轮和所述第七齿轮通过所述第二连接轴与所述水平锥齿轮同轴连接,所述第七齿轮与第八齿轮在第一平面内相啮合,所述第八齿轮与第九齿轮在所述第一平面内相啮合,所述第五齿轮与第六齿轮在第二平面内相啮合。
14.根据权利要求13所述的运动控制装置,其特征在于,在所述第九齿轮上设置第三连接轴,在所述第六齿轮上设置第四连接轴,所述第三齿轮组通过所述第三连接轴和所述第四连接轴分别与所述输送轮组连接。15.根据权利要求1所述的运动控制装置,其特征在于,所述输送轮组包括相对设置的第一输送轮和第二输送轮,所述导管夹设在两个所述输送轮之间。16.根据权利要求15所述的运动控制装置,其特征在于,在所述第一输送轮和所述第二输送轮上分别套设第一送丝带和第二送丝带,所述第一送丝带和所述第二送丝带用于配合驱动所述导管沿直线往复运动。17.根据权利要求16所述的运动控制装置,其特征在于,所述第一送丝带和所述第二送丝带采用聚氨酯或者硅胶材料制成。18.根据权利要求15所述的运动控制装置,其特征在于,还包括调整装置,所述调整装置包括调整旋钮以及连杆组,所述连杆组与所述第二输送轮连接,通过旋转所述调整旋钮以通过所述连杆组以调整两个所述输送轮之间的间隙。19.根据权利要求17所述的运动控制装置,其特征在于,所述调整旋钮设置在所述导管外筒的所述侧壁上。20.根据权利要求18所述的运动控制装置,其特征在于,还包括固定架,所述固定架与所述第一输送轮连接并且用于固定所述第一输送轮的位置,所述连杆组设置在所述固定架以及所述调整旋钮之间以调整所述第二输送轮的位置。21.根据权利要求20所述的运动控制装置,其特征在于,所述连杆组包括第一连杆以及第二连杆,所述调整旋钮通过调整螺钉与所述第一连杆的一端连接,所述第一连杆的另一端与所述第二输送轮连接,所述第二连杆的两端分别与所述第二输送轮和所述固定架连接。22.根据权利要求16所述的运动控制装置,其特征在于,在所述第一送丝带和所述第二送丝带上设置所述安装槽,所述安装槽的截面为半圆状。23.根据权利要求22所述的运动控制装置,其特征在于,在所述第一送丝带和所述第二送丝带上设置不同截面尺寸的多个所述安装槽,多个不同截面尺寸的所述安装槽按照一定顺序依次布置。24.一种手术机器人,其特征在于,包括权利要求1-23中任一项所述的运动控制装置。
技术总结
本公开实施例提出了一种用于导管的运动控制装置,其包括第一齿轮组、第二齿轮组以及输送轮组,在所述输送轮中设置安装槽以夹紧所述导管,其中,所述第一齿轮组用于带动所述输送轮组中的所述导管旋转运动,所述第二齿轮组通过锥齿轮组与第三齿轮组连接,所述第三齿轮组用于带动所述输送轮组中的所述导管沿直线往复运动。本公开实施例能够控制不同规格的导管分别独立实现旋转运动和直线往复运动,并且控制两种运动相互之间不会影响,还能够实现快速组装和拆卸。速组装和拆卸。速组装和拆卸。
技术研发人员:王羿儒 熊科 王德倡 柳秋圆 张涵 邢庭瑀
受保护的技术使用者:上海神玑医疗科技有限公司
技术研发日:2022.02.24
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。