1.本发明涉及绘图领域,特别涉及一种垂直绘图方法。
背景技术:
2.绘图技术在人们的生活和工作过程中起着越来越重要的作用。工业设计、服装设计、工程设计、游戏素材创作、影视素材创作、教育教学等都需要使用到草图的绘制。矢量绘图技术作为一种新颖的绘图技术被广泛地接受和使用。但在实际使用过程中,大型打印设备或者绘图仪器价格昂贵,需要专业的技术维护,同时还需要购买相应的配套耗材,普通设计人员和专业工作者无法自行购买。
技术实现要素:
3.针对以上现有技术存在的缺陷,本发明的主要目的在于克服现有技术的不足之处,公开了一种垂直绘图方法,包括以下步骤:
4.s1、将需要绘制的图像通过计算机转为图像g代码;
5.s2、启动绘图设备,输入绘图区域大小并对设备初始化;
6.s3,建立坐标数学模型,读取图像g代码,绘图设备根据g代码给定的坐标控制绘图笔进行绘图;
7.s4,代码执行完成后,抬起绘图笔并回复至初始位置;
8.其中,所述绘图设备包括绘图板、导向机构、牵引线、画笔机构和驱动机构,所述绘图板竖向设置,所述驱动机构安装在所述绘图板上,所述导向机构分设在所述驱动机构的两侧,所述画笔机构浮动于所述绘图板上,所述画笔机构上安装两根所述牵引线,且所述牵引线的另一端分别绕经所述导向机构与所述驱动机构连接,利用所述驱动机构收放所述牵引线。
9.进一步地,s1中,计算机通过inkscap软件将绘制的图片转换为图片g代码。
10.进一步地,s2的具体步骤为:
11.s21、输入的图纸大小,
12.s22、根据图纸大小,确定图纸中心为原点;
13.s23、控制绘图笔复位至原点。
14.进一步地,s3中的坐标模型为(x,y)=(acosθ x
min
,lsinθ y
min
);其中,a为当前画笔机构至左侧导向机构的距离,x
min
为x轴负方向的极限值,y
min
为y轴负方向的极限值;cosθ=(a2 b
2-c2)/2ab,a=a
原
a
调
,a
原
为当绘图笔在原点时,画笔机构至左侧导向机构的距离;a
调
为驱动机构收/放左侧牵引线的长度,放线时,a
调
为正值,收线时,a
调
为负值。
15.进一步地,所述驱动机构包括箱体、卷绕机构和导向板,所述卷绕机构分设在所述箱体内,所述卷绕机构的一侧设置导向板,所述导向板上设置导线孔,并且在所述箱体的对应位置设置通线孔;所述卷绕机构包括步进电机和滚轮,所述步进电机固定在所述箱体上,所述滚轮安装在所述步进电机上,所述滚轮的侧壁径向凹设线槽。
16.进一步地,a
调
=μ*s
步
,s
步
为所述步进电机转动的步数,μ为步进电机的步距;μ=c
滚轮
/s
电机
;其中,c
滚轮
为所述滚轮的周长,s
电机
为所述步进电机每旋转一周的步数。
17.进一步地,所述画笔机构包括底座、第一连杆、第二连杆、第三连杆、舵机和画笔安装机构,所述底座的底面为与所述绘图板贴合的平面,所述第一连杆和所述第三连杆铰接在所述底座上,所述第二连杆的一端与所述第一连杆铰接,另一端安装所述舵机,所述舵机的驱动端与所述第三连杆连接,所述画笔安装机构设置在所述第二连杆上,用于安装画笔;所述舵机的底部和底座上设置磁铁。
18.进一步地,所述画笔安装机构包括安装座和夹紧螺丝,所述安装座上贯穿设置容许画笔通过的安装孔,所述安装座的一侧设置与所述夹紧螺丝配合的且与所述安装孔贯穿的螺孔,利用所述夹紧螺丝将画笔夹紧固定在所述安装孔内。
19.本发明涉及的绘图方法,与配套的绘图设备相配合,操作方便,通用性强,适合不同大小的图纸;由于旋转拉线结构的应用,硬件成本也大幅降低,该设计方案新颖可靠,结构稳定,同时拥有良好的绘图精度,可广泛应用于各种草图的绘制。
附图说明
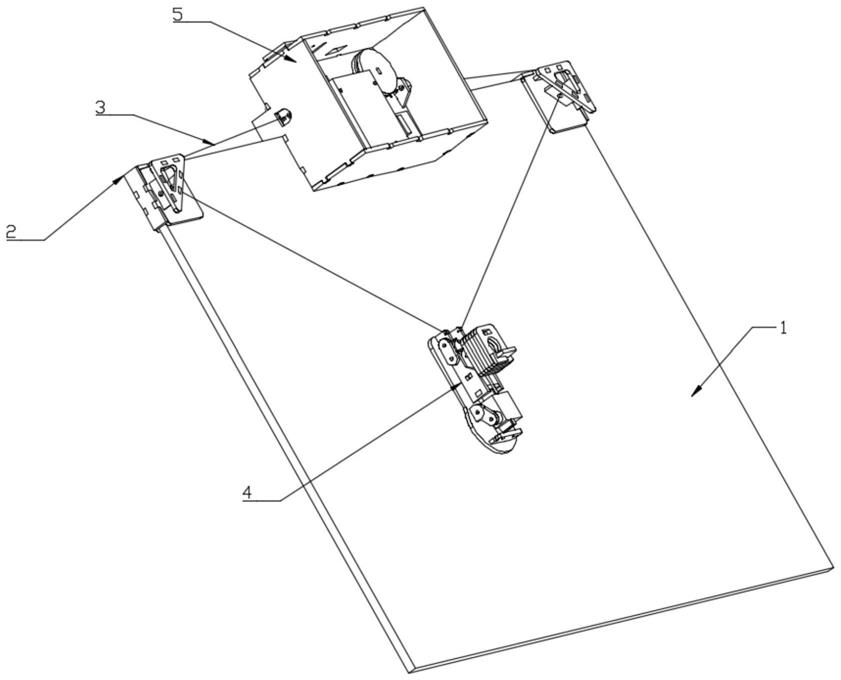
20.图1为绘图设备的立体结构示意图;
21.图2为绘图设备的主视图;
22.图3为画图机构的立体结构示意图;
23.图4为导向机构的立体结构示意图;
24.图5为驱动机构的立体结构示意图;
25.图6为本发明一种垂直绘图方法的流程示意图;
26.图7为绘图分析示意图;
27.附图标记如下:
28.1、绘图板,2、导向机构,3、牵引线,4、画笔机构,5、驱动机构,21、固定座,22、连接板,23、导向块,41、底座,42、第一连杆,43、第二连杆,44、第三连杆,45、舵机,46、画笔安装机构,51、箱体,52、卷绕机构,53、导向板,221、操作口,231、导向孔,461、安装座,462、安装孔,511、通线孔,521、步进电机,522、滚轮,523、线槽,531、导线孔。
具体实施方式
29.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图及实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
30.一种垂直绘图方法,如图6所示,包括以下步骤:
31.s1、将需要绘制的图像通过计算机转为图像g代码;
32.s2、启动绘图设备,输入绘图区域大小并对设备初始化;
33.s3,建立坐标数学模型,读取图像g代码,绘图设备根据g代码给定的坐标控制绘图笔进行绘图;
34.s4,代码执行完成后,抬起绘图笔并回复至初始位置。
35.其中,s1中,图片通过计算机上的inkscape软件转换为图片g代码。
36.s2的具体步骤为,s21、输入的图纸大小,
37.s22、根据图纸大小,确定图纸中心为原点;
38.s23、控制绘图笔复位至原点。
39.s3中的坐标模型为(x,y)=(acosθ x
min
,lsinθ y
min
);其中,a为当前画笔机构至左侧导向机构的距离,x
min
为x轴负方向的极限值,y
min
为y轴负方向的极限值;cosθ=(a2 b
2-c2)/2ab,a=a
原
a
调
,a
原
为当绘图笔在原点时,画笔机构至左侧导向机构的距离;a
调
为驱动机构收/放左侧牵引线的长度,放线时,a
调
为正值,收线时,a
调
为负值。
40.在一实施例中,a
调
=μ*s
步
,s
步
为所述步进电机转动的步数,μ为步进电机的步距;μ=c
滚轮
/s
电机
;其中,c
滚轮
为所述滚轮的周长,s
电机
为所述步进电机每旋转一周的步数。
41.根据上述绘图方法,本发明还公开了一种绘图设备,如图1-3所示,包括绘图板1、导向机构2、牵引线3、画笔机构4和驱动机构5,绘图板1竖向设置,驱动机构5安装在绘图板1上,导向机构2分设在驱动机构5的两侧,画笔机构4浮动于绘图板1上,画笔机构4上安装两根牵引线3,且牵引线的另一端分别绕经导向机构2与驱动机构5连接,利用驱动机构5收放牵引线3。通过控制两侧的牵引线3的长短,可以控制画笔机构4位于绘图板1上的位置,并配合画笔机构4抬升和放下画笔以实现在绘图板1上绘制线条。
42.具体的,如图1-3所示,画笔机构4包括底座41、第一连杆42、第二连杆43、第三连杆44、舵机45和画笔安装机构46,底座41的底面为与绘图板1贴合的平面,第一连杆42和第三连杆44铰接在底座41上,第二连杆43的一端与第一连杆42铰接,另一端安装舵机45,舵机45的驱动端与第三连杆44连接,画笔安装机构46设置在第二连杆44上,用于安装画笔。使用时,如图3所示,舵机45顺时针旋转第三连杆44,进而驱动第一连杆42同步转动,进而驱动画笔安装机构46向绘图板1移动;反之,逆时针转动第三连杆44,驱动画笔安装机构46远离绘图板1,使得画笔离开绘图板1。另外,为了提高画笔抬升和下降时的稳定性,在舵机45的底部和底座41上安装磁铁,使其相互吸引,使得舵机45与底座41之间始终存在一定牵引力。其中,舵机45可以采用的型号为ts90a。
43.在一实施例中,如图3所示,画笔安装机构46包括安装座461和夹紧螺丝(未示出),安装座461上贯穿设置容许画笔通过的安装孔462,安装座461的一侧设置与夹紧螺丝配合的且与安装孔贯穿的螺孔,利用夹紧螺丝将画笔夹紧固定在安装孔462内。
44.在一实施例中,如图4所示,导向机构2包括固定座21、连接板22和导向块23,固定座21为一长方体,固定座21的侧壁向内凹设与绘图板厚度配合的安装槽,导向块23呈三角形分布设置在固定座21上,并通过连接板22连接固定,导向块23上设置导向孔231。牵引线3穿过导向孔231连接驱动机构5和画笔机构4。优选的,导向孔231的开口处设置倒角。
45.在上述实施例中,如图4所示,连接板22上设置操作口221。工作人员能够通过操作口方便的将位于一导向孔231的牵引线3穿过另一导向孔231。
46.在一实施例中,如图5所示,驱动机构5包括箱体51、卷绕机构52和导向板53,卷绕机构52设置两组,且分设在箱体51内,每一卷绕机构52控制一根牵引线3,通过卷绕机构52调整两根牵引线3放出的长度,进而驱动画笔机构4在绘图板1上移动。每一卷绕机构52的一侧均设置一导向板53,导向板53上设置引导牵引线3的导线孔531,并且在箱体51的对应位置设置使牵引线3通过的通线孔511。
47.在上述实施例中,如图5所示,卷绕机构52包括步进电机521和滚轮522,步进电机
521固定在箱体51上,滚轮522安装在步进电机521上,滚轮522的侧壁径向凹设线槽523,使得牵引线3存储于线槽523内。其中,步进电机521选择的型号为28byj-48。
48.下面以上述绘图设备对s3进行详细阐述:
49.假定图纸大小为580mm*460mm,将绘图板1竖直放置,且设置一倾角,将图纸贴附于绘图板1上,将导向机构2安装在图纸的左右两个上顶角处,并对其他设别进行安装,如图1所示。本实施例中,步进电机每旋转一周(360度)发出2048步,步进电机线轴直径d=35mm,则线轴周长为:
50.c=πd=3.14*35=109.956mm。
51.步进电机的步距(最小分辨率),每步线绳被拉动的距离为:
52.μ=c/2048=109.956/2048=0.026845mm。
53.如图7所示,本文中左侧导向机构(m1)和右侧导向机构(m2)之间的距离是b=580mm坐标零点定义为安装板中心(p)则:
54.x轴最大值xmax=290
55.x轴最小值xmin=-290
56.y轴最大值ymax=230
57.y轴最小值ymin=-230
58.定义画笔机构4至左侧导向机构2的距离为a,笔机构4至左侧导向机构2的距离为c,两导向机构2之间的距离为b;根据余弦定律,由m1,m2,p三点构成的三角形,则有:cosθ=(a2 b
2-c2)/2ab;可求得θ的角度。a=a
原
a
调
,a
原
为当绘图笔在原点时,画笔机构4至左侧导向机构2的距离;根据勾股定律即可得到的a
原
值;a
调
可根据步进电机转动步数以及滚轮周长确定,即a
调
=μ*s
步
,s
步
为所述步进电机转动的步数,μ为步进电机的步距;μ=c
滚轮
/s
电机
;其中,c
滚轮
为所述滚轮的周长,s
电机
为所述步进电机每旋转一周的步数。放线时,步进电机的转动方向记录为正值,收线时,步进电机的转动方向记录为负值;因此,根据上述公式,可直接的出a的值。
59.通过上述方法,根据图片给出的定位,确定驱动机构5的步进电机转动方向及步数,进而控制画笔机构在图纸上的位置。
60.以上仅为本发明的较佳实施例,并非用来限定本发明的实施范围;如果不脱离本发明的精神和范围,对本发明进行修改或者等同替换,均应涵盖在本发明权利要求的保护范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。