1.本技术涉及无人机领域,特别是设计一种用于远距离监测的机载系统。
背景技术:
2.目前,可采用人工或采用无人机对海洋浮标进行搜寻、定位工作,然而,采用人工搜索成本较高时效性低、可靠性差,而采用无人机需要对无人机信息实时处理并将结果传输至监控中心,并对所传输的搜寻结果进行优化,选取有效的搜寻信息,否则监控中心会大量堆积信息量少的搜寻结果,不便于监控中心查阅历史检测信息,若不及时处理,必须将采集的数据存储在本地,待检测完成方可查看,而由于数据量庞大,需要较大的存储空间或经常更新存储空间,且不便于翻阅历史检测信息。
技术实现要素:
3.本技术旨在至少解决现有技术中存在的技术问题之一。为此,本技术提供了一种用于远距离监测的机载系统。
4.本技术实施方式的用于远距离监测的机载系统,包括无人机和终端设备,所述无人机与所述终端设备通信,所述无人机包括:
5.图像采集模块,用于实时获取视频图像数据;
6.处理模块,连接所述图像采集模块,所述处理模块用于处理所述视频图像数据以得到目标检测结果;
7.第一无线通信模块,包括第一窄带通信单元和第一宽带通信单元,所述无人机通过所述第一窄带通信单元和所述第一宽带通信单元连接所述终端设备以分别向所述终端设备传输所述目标检测结果和所述视频图像数据。
8.在某些实施方式中,所述第一窄带通信单元通过通用串行总线连接所述处理模块,所述第一窄带通信单元用于向所述终端设备传输飞行状态数据、控制指令数据和检测结果中的一种或多种报文数据;
9.所述第一宽带通信单元通过以太网接口连接所述处理模块,用于向所述终端设备实时传输视频图像数据。
10.在某些实施方式中,所述图像采集模块通过通用串行总线与所述处理模块连接。
11.在某些实施方式中,所述无人机还包括:
12.电源模块,连接所述图像采集模块、所述处理模块和所述第一无线通信模块,用于为所述图像采集模块、所述处理模块和所述第一无线通信模块供电;
13.散热模块,用于给所述无人机散热。
14.在某些实施方式中,所述电源模块包括dc-dc电源、升压转换器和降压转换器,所述dc-dc电源通过所述升压转换器连接所述处理模块和所述第一无线通信模块,所述dc-dc电源通过所述降压转换器连接所述散热模块。
15.在某些实施方式中,所述第一无线通信模块还包括:
16.中继台,所述中继台连接所述第一窄带通信单元和所述第一宽带通信单元。
17.在某些实施方式中,所述终端设备包括:
18.第二无线通信模块,包括第二宽带通信单元和第二窄带通信单元,所述第二宽带通信单元用于与所述第一宽带通信单元无线通信以实时接收所述视频图像数据,所述第二窄带通信单元用于与所述第一窄带通信单元无线通信以传输报文数据;
19.处理器,所述处理器通过以太网接口连接所述第二宽带通信单元,通过通用串行总线连接所述第二窄带通信单元。
20.本技术的用于远距离监测的机载系统中,通过图像采集模块获取到视频图像数据,并通过处理模块对视频图像数据进行处理从而得到目标检测结果,再通过第一窄带通信单元将目标检测结果传输至与无人机通信的终端设备中,以及通过第一宽带通信单元将视频图像数据传输至终端设备。一方面,通过无人机对目标进行搜寻,扩大了搜寻范围,比传统人工巡检更加灵活,减少人力成本。另一方面,通过第一窄带通信单元和第一宽带通信单元与终端设备连接,扩大了信号传输的覆盖范围,从而提高了检测范围。此外,通过得到的目标检测结果可以选择性的传输视频图像数据,减少了传输、存储的数据量,也便于远程监控中心的终端设备查阅历史信息。
21.本技术的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
22.本技术的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
23.图1是本技术实施方式的用于远距离监测的机载系统的模块示意图。
24.图2是本技术实施方式的用于远距离监测的机载系统的又一模块示意图。
25.主要元件符号说明:
26.机载系统100;
27.无人机10、图像采集模块11、处理模块12、第一无线通信模块13、第一窄带通信单元131、第一宽带通信单元132、散热模块14、电源模块15;
28.终端设备20、第二无线通信模块21、第二窄带通信单元211、第二宽带通信单元212、处理器22、显示模块23、存储装置24。
具体实施方式
29.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
30.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于
描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
31.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
32.下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
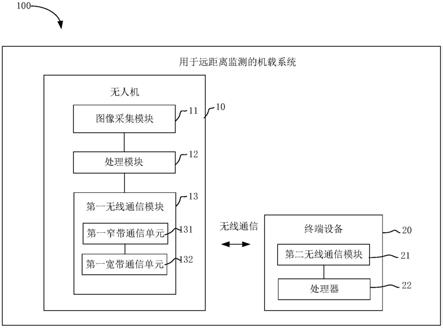
33.请参阅图1,本技术公开了一种用于远距离监测的机载系统100,机载系统100包括无人机10和终端设备20,无人机10与终端设备20通信。
34.无人机10包括图像采集模块11、处理模块12和第一无线通信模块13。其中,图像采集模块11用于实时获取视频图像数据。处理模块12连接图像采集模块11,用于处理视频图像数据以得到目标检测结果,第一无线通信模块13包括第一窄带通信单元121和第一宽带通信单元132,无人机10通过第一窄带通信单元121和第一宽带通信单元132连接终端设备20以分别向终端设备20传输目标检测结果和视频图像数据。
35.本技术的机载系统100,通过图像采集模块11获取到视频图像数据,并通过处理模块12对视频图像数据进行处理从而得到目标检测结果,再通过第一窄带通信单元121将目标检测结果传输至与无人机10通信的终端设备20中,以及通过第一宽带通信单元132将视频图像数据传输至终端设备20。一方面,通过无人机10对目标进行搜寻,扩大了搜寻范围,比传统人工巡检更加灵活,减少人力成本,另一方面,通过第一窄带通信单元121和第一宽带通信单元132与终端设备20连接,扩大了信号传输的覆盖范围,从而提高了检测范围。此外,通过得到的目标检测结果可以选择性的传输视频图像数据,从而可以减少数据的传输和存储,也便于远程监控中心的终端设备20查阅历史信息。
36.请结合图1-2,下面以用于远距离监测的机载系统100的具体模块结构进行说明。
37.具体地,机载系统100用于检测海洋浮标状态。需要说明的是,海洋浮标是漂浮在水面上的一种航标,通过锚链固定在水底。浮标用途广泛,其作用是标记航道范围,指示浅滩或危及航行的障碍物。它是一个无人的自动海洋观测站,由被固定在指定的海域,随波起伏,如同航道两旁的航标。因此,海洋浮标是否异常至关重要。
38.机载系统100包括有无人机10和终端设备20。无人机10与终端设备20之间可采用无线网格网络(mesh自组网)技术实现通信。本领域技术人员可以理解地,mesh自组网采用ofdm技术和移动ad hoc网络技术,不依赖任何基础通信设施,可临时、动态、快速构建一个无线多跳ip mesh网络,具有自组织、自恢复、高抗毁的能力,支撑数据、话音、视频等多媒体业务多跳传输。无线mesh可以与其它网络协同通信,是一个动态的可以不断扩展的网络架
构,任意的两个设备均可以保持无线互联。因此,采用无线网格网络,既可以保证无人机10与远程地面站之间存在较强干扰时仍能提供实时、高速、可靠的数据传输服务能力,也可以保证稳定高速率的远距离通信能力。
39.需要说明的是,ofdm技术也叫正交频分复用技术,是一种多载波调制技术。ofdm技术原理是在频域内将信道分成若干正交子信道,将高速数据信号转换成并行的低速子数据流,并分别调制到每个子信道上进行传输。正交信号可以通过在接收端采用相关技术来分开,这样可以减少子信道之间的相互干扰(ici)。每个子信道上的信号带宽小于信道的相关带宽,因此每个子信道上的传输可以看成平坦性衰落,从而可以消除符号间干扰(isi)。由于每个子信道的带宽仅仅是原信道带宽的一小部分,降低了信道均衡的难度。
40.无人机10可以为旋翼无人机,可以理解地,通过使用旋翼无人机对目标进行搜寻,可扩大搜寻范围,从而减少无人机数量,并且,比传统人工巡检更加灵活,减少人力物力成本。
41.无人机10包括有机架(图中未示出)、图像采集模块11、处理模块12、第一无线通信模块13、散热模块14和电源模块15。
42.其中,图像采集模块11可安装于机架下方,通过通用串行总线(usb线)与处理模块12电连接,图像采集模块11可以为高清摄像头,用于采集海洋中浮标的视频图像数据,并通过usb线实时传输至处理模块12中。
43.处理模块12包括有以太网接口、多个串行接口、存储单元和主控单元,处理模块12通过串行接口与图像采集模块11连接,处理模块12还通过串行接口和以太网接口连接第一无线通信模块13。存储单元存储有目标检测算法,主控单元可从图像采集模块11采集的视频图像数据中抽取图像帧,抽取的帧率不限,例如可以为25fps,通过目标检测算法来对获取的图像帧进行预处理以及卷积神经网络处理,从而识别出海洋上的浮标,进而得到目标检测结果。
44.在一些示例中,处理模块12可以为嵌入式计算平台,其中,存储单元可以为例如250gb容量、m.2接口的固态硬盘。处理模块12还可用于获取当前位置的经纬度信息、高度等表征无人机10飞行状态的参数信息。
45.处理模块12还包括有系统时钟,系统时钟可得到实时时间戳信息,时间戳可转换为公历日期及24小时制时钟信息。
46.第一无线通信模块13包括第一窄带通信单元121和第一宽带通信单元132,其中,第一窄带通信单元121通过通用串行总线连接处理模块12的串行接口,第一宽带通信单元132通过连接处理模块12的以太网接口。
47.第一窄带通信单元121和第一宽带通信单元132分别与终端设备20无线通信。处理模块12可通过第一窄带通信单元121在与终端设备20之间传输无人机10的参数信息、控制指令数据以及目标检测结果等报文信息,以及通过第一宽带通信单元132在与终端设备20之间传输视频图像数据。
48.第一窄带通信单元121可以是基于软件无线电技术的高速窄带数传自组网电台。工作频率为902-928mhz。第一宽带通信单元132采用的是基于软件无线电技术的无线自组织网络电台,工作频率为1400mhz,支持5m~40mhz可调频宽,传输速率最高可达96mbps,无障碍传输距离10~20km。
49.进一步地,在某些实施方式中,第一无线通信模块13还包括中继台,中继台连接第一窄带通信单元121和第一宽带通信单元132。需要说明的是,中继台用于增大通讯距离,扩展覆盖范围的一种通信装置。因此,通过设置中继台,有效地提升了第一窄带通信单元121和第一宽带通信单元132的通信范围。
50.散热模块14可包括散热风扇,散热模块14可靠近第一无线通信模块13的一侧设置,以用于给第一无线通信模块13散热。
51.电源模块15分别连接图像采集模块11、处理模块12和第一无线通信模块13和散热模块14,用于为图像采集模块11、处理模块12和第一无线通信模块13以及散热模块14供电。
52.在一些示例中,电源模块15可包括多个,多个电源模块15的电压不同,多个电源模块15分别与图像采集模块11、处理模块12和第一无线通信模块13和散热模块14以分别为其供电。
53.在一些示例中,电源模块15可以为一个,具体地,电源模块15包括dc-dc电源、升压转换器和降压转换器,dc-dc电源通过升压转换器连接处理模块12和第一无线通信模块13,dc-dc电源通过降压转换器连接散热模块14。其中,升压转换器可以为dc-dc可调升压电源装置,降压转换器可以为直流电源降压装置。
54.例如,dc-dc电源的电压可以为16.8v,dc-dc电源可通过升压转换器将电压升至22v以给第一宽带通信单元132供电,可通过降压转换器将电压升至12v以给散热模块14供电。
55.终端设备20可以为无人机10的控制中心,用户可通过终端设备20来查看到无人机10的状态信息、目标检测结果以及视频图像数据等,并且,还可通过终端设备20向无人机10发送控制指令以控制无人机10执行对应的操作。
56.终端设备20包括第二无线通信模块21、处理器22、显示模块23和存储装置24。处理器22分别连接第二无线通信模块21、显示模块23和存储装置24。终端设备20通过第二无线通信模块21与无人机10通信。
57.具体地,第二无线通信模块21包括第二宽带通信单元212和第二窄带通信单元211,第二宽带通信单元212用于与第一宽带通信单元132无线通信以实时接收视频图像数据,第二窄带通信单元211用于与第一窄带通信单元121无线通信以传输报文数据。报文数据可以包括但不限于飞行状态数据(无人机的经纬度、高度等)、控制指令数据和检测结果等。
58.处理器22通过以太网接口连接第二宽带通信单元212,通过通用串行总线连接第二窄带通信单元211。处理器可用于根据用户请求而生成用于控制无人机的控制指令。
59.显示模块23可用于显示无人机的目标检测结果以及无人机的飞行状态数据等(例如无人机所在地图位置、无人机高度等)。
60.存储装置24可存储无人机10传输的报文数据、视频图像数据等信息。
61.如此,在无人机检测到海面上的浮标出现异常时,用户可通过终端设备20监测到从而及时做出应对。
62.在本说明书的描述中,参考术语“一个实施方式”、“某些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书
中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
63.尽管已经示出和描述了本技术的实施方式,本领域的普通技术人员可以理解:在不脱离本技术的原理和宗旨的情况下可以对这些实施方式进行多种变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。