1.本实用新型涉及车辆控制技术领域,尤其是一种挂车倒车辅助系统。
背景技术:
2.挂车是指由汽车牵引而本身无动力驱动装置的车辆,由一辆汽车(货车或牵引车、叉车)与一辆或一辆以上挂车的组合,载货汽车和牵引汽车为汽车列车的驱动车节,称为主车,被主车牵引的从动车节称为挂车,是公路运输的重要车种,用于载运人员或货物,可方便地实现区段运输。
3.目前国内现有的挂车大多没有搭载倒车辅助系统,在需要倒车时,必须要专人对驾驶员操作进行指挥,智能化程度和安全性能低。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种可以利用超声波测距模块监测倒车安全距离,基于tebs控制器实现倒车速度管控与防碰撞主动刹车功能的挂车倒车辅助系统。
5.本实用新型解决其技术问题是采取以下技术方案实现的:
6.一种挂车倒车辅助系统,包括tebs控制器,所述tebs控制器用于接收并处理驾驶员的操作指令以及挂车内电子模块的数据信息,所述tebs控制器连接有若干个弹簧制动气室,所述弹簧制动气室连接有ebs继动阀,所述ebs继动阀的控制端连接所述tebs控制器,所述tebs控制器连接有挂车扩展模块,用于对所述tebs控制器的功能接口进行扩展,所述挂车扩展模块连接有智能监控设备、报警机构和超声波测距模块;
7.所述智能监控设备用于接收车辆的监控信息并加以显示,所述超声波测距模块用于监测挂车至障碍物之间的安全距离,并通过所述挂车扩展模块传输至所述tebs控制器中,所述tebs控制器对输入的数据信息进行处理,若监测的挂车至障碍物之间的安全距离达到所述tebs控制器内设的最小阈值时,所述tebs控制器通过挂车扩展模块给报警机构发送指令,报警机构发出警报,并由所述tebs控制器控制所述弹簧制动气室采取车辆制动动作,刹停车辆。
8.优选的,所述报警机构包括若干个蜂鸣器和若干个指示灯,若干个所述蜂鸣器位于挂车车辆的车头和车尾处,用于声音警示,若干个所述指示灯分布在挂车车辆的车身周围,用于灯光警示。
9.优选的,所述tebs控制器通过iso7638标准的线缆与挂车车辆的牵引头连接,挂车车辆的牵引头给所述tebs控制器发送倒挡信号和轮速信号。
10.优选的,所述挂车车辆的牵引头给所述tebs控制器发送的倒挡信号和轮速信号为符合iso11992协议的can总线信号。
11.优选的,所述tebs控制器与所述挂车扩展模块通过插接件进行连接,所述挂车扩展模块的电源由所述tebs控制器提供,且所述tebs控制器与所述挂车扩展模块之间的通讯
协议为符合iso11992协议的can总线。
12.优选的,所述挂车扩展模块通过pwm或lin的通讯方式获取所述超声波测距模块提供的安全距离信号。
13.优选的,所述智能监控设备与所述挂车扩展模块之间通过can总线或无线蓝牙方式进行数据通讯。
14.优选的,所述弹簧制动气室为带行车制动腔与驻车制动腔的双控弹簧制动气室。
15.优选的,所述tebs控制器包括tebs电磁阀,所述tebs电磁阀的接口包括电磁阀21接口、电磁阀31接口、电磁阀4接口、电磁阀1接口、电磁阀32接口和电磁阀22接口,所述电磁阀21接口和电磁阀22接口为电控气压输出口,所述电磁阀31接口和电磁阀32接口为电控气压排气口,所述电磁阀4接口为制动脚阀控制口,所述电磁阀1接口为电控控制回路接口。
16.一种挂车倒车辅助系统的控制方法,其控制方法如下:
17.s1、挂车车辆挂入倒车档位,tebs控制器接收倒挡信号并进入倒车辅助模式,智能监控设备和报警机构进入工作模式,由智能监控设备采集挂车车辆的行驶信号,并由报警机构发出倒车提示;
18.s2、超声波测距模块将监测的挂车车尾至障碍物之间的距离信息通过挂车扩展模块传输至tebs控制器中,tebs控制器结合距离信息与挂车车辆的轮速信号,进行数据处理;
19.s3、tebs控制器检测挂车车辆有无加速信号,若无,则进行第四步,若有,则进行第五步;
20.s4、设定一个轮速数值,tebs控制器检测挂车车辆的当前轮速信号,若当前轮速信号大于设定的轮速数值,挂车扩展模块发送间歇式制动需求给tebs控制器,使车速保持在设定的轮速数值,若当前轮速信号小于设定的轮速数值,则判断挂车车辆的车尾与障碍物之间的距离是否在tebs控制器预设的安全阈值内,若在安全阈值内,则继续倒车,若不在安全阈值内,则tebs控制器控制弹簧制动气室采取制动,刹停挂车车辆;
21.s5、设定一个加速轮速数值,tebs控制器检测挂车车辆的当前轮速信号,若此时的轮速信号持续大于设定的加速轮速数值,则tebs控制器退出倒车辅助模式。
22.本实用新型的优点和积极效果是:
23.本实用新型通过挂车扩展模块与超声波测距模块采集安全距离信息,通过can总线发送至tebs控制器中,tebs控制器通过控制电磁阀来实现倒车速度管控和防碰撞主动刹车功能,且设有智能监控设备,通过指示灯和蜂鸣器起到报警作用,使挂车在装卸货物时,安全性能和智能化程度得到提升。
附图说明
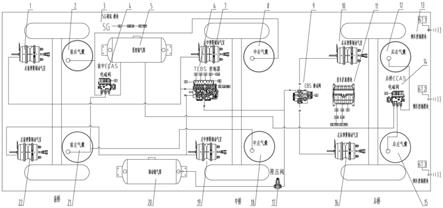
24.图1是本实用新型的倒车辅助系统的结构示意图;
25.图2是本实用新型的倒车辅助系统的电路连接示意图;
26.图3是本实用新型的倒车辅助系统的工作流程示意图;
27.图4是本实用新型的tebs控制器控制弹簧制动气室工作的原理示意图。
28.图中:1、智能监控设备;2、蜂鸣器;3、指示灯;4、tebs控制器;5、弹簧制动气室;6、ebs继动阀;7、挂车扩展模块;8、超声波测距模块;9、电磁阀21接口;10、电磁阀31接口;11、电磁阀4接口;12、电磁阀1接口;13、电磁阀32接口;14、电磁阀22接口。
具体实施方式
29.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
30.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.以下结合附图对本实用新型实施例做进一步详述:
33.如图1和图2所示,本实用新型所述的一种挂车倒车辅助系统,包括tebs控制器4,tebs控制器4用于接收并处理驾驶员的操作指令以及挂车内电子模块的数据信息,tebs控制器4通过iso7638标准的线缆与挂车车辆的牵引头连接,挂车车辆的牵引头给tebs控制器4发送倒挡信号和轮速信号,挂车车辆的牵引头给tebs控制器4发送的倒挡信号和轮速信号为符合iso11992协议的can总线信号,tebs控制器4连接有若干个弹簧制动气室5,弹簧制动气室5为带行车制动腔与驻车制动腔的双控弹簧制动气室,弹簧制动气室5连接有ebs继动阀6,ebs继动阀6的控制端连接tebs控制器4,tebs控制器4连接有挂车扩展模块7,用于对tebs控制器4的功能接口进行扩展,挂车扩展模块7连接有智能监控设备1、报警机构和超声波测距模块8;
34.智能监控设备1用于接收车辆的监控信息并加以显示,超声波测距模块8用于监测挂车至障碍物之间的安全距离,并通过挂车扩展模块7传输至tebs控制器4中,tebs控制器4对输入的数据信息进行处理,若监测的挂车至障碍物之间的安全距离达到tebs控制器4内设的最小阈值时,tebs控制器4通过挂车扩展模块7给报警机构发送指令,报警机构发出警报,并由tebs控制器4控制弹簧制动气室5采取车辆制动动作,刹停车辆。
35.在本实施例中,报警机构包括若干个蜂鸣器2和若干个指示灯3,若干个蜂鸣器2位于挂车车辆的车头和车尾处,用于声音警示,若干个指示灯3分布在挂车车辆的车身周围,用于灯光警示。
36.如图2所示,本实施例中的tebs控制器4与挂车扩展模块7通过插接件进行连接,挂车扩展模块7的电源由tebs控制器4提供,且tebs控制器4与挂车扩展模块7之间的通讯协议为符合iso11992协议的can总线,挂车扩展模块7通过pwm或lin的通讯方式获取超声波测距模块8提供的安全距离信号,智能监控设备1与挂车扩展模块7之间通过can总线或无线蓝牙方式进行数据通讯。
37.如图4所示,tebs控制器4包括tebs电磁阀,tebs电磁阀的接口包括电磁阀21接口9、电磁阀31接口10、电磁阀4接口11、电磁阀1接口12、电磁阀32接口13和电磁阀22接口14,
电磁阀21接口9和电磁阀22接口14为电控气压输出口,电磁阀31接口10和电磁阀32接口13为电控气压排气口,电磁阀4接口11为制动脚阀控制口,电磁阀1接口12为电控控制回路接口。
38.下面对tebs电磁阀控制弹簧制动气室5的工作原理做进一步描述:
39.当电磁阀阀芯61.2和电磁阀阀芯61.5接通时,tebs控制器4进入电控充气模式,电磁阀1接口12气压会通过阀体内部管路由电磁阀21接口9和电磁阀22接口14直接输出气压,弹簧制动气室5内气压上升,实现制动。
40.当电磁阀阀芯61.1和电磁阀阀芯61.6接通电压达到预设值a时切换通道,此时电磁阀21接口9和电磁阀1接口12分别实现保压。
41.当电磁阀阀芯61.1和电磁阀阀芯61.6接通电压达到预设值b时切换通道,此时电磁阀21接口9通过电磁阀31接口10排气,弹簧制动气室5内气压下降,制动力减少。
42.当电磁阀阀芯61.4和电磁阀阀芯61.3接通电压达到预设值a时切换通道,此时电磁阀22接口14和电磁阀1接口12分别实现保压。
43.当电磁阀阀芯61.4和电磁阀阀芯61.3接通电压达到预设值b时切换通道,此时电磁阀22接口14通过电磁阀32接口13排气,弹簧制动气室5内气压下降,制动力减少。
44.如图3所示,一种挂车倒车辅助系统的控制方法,其控制方法如下:
45.s1、挂车车辆挂入倒车档位,tebs控制器4接收倒挡信号并进入倒车辅助模式,智能监控设备1和报警机构进入工作模式,由智能监控设备1采集挂车车辆的行驶信号,并由报警机构发出倒车提示;
46.s2、超声波测距模块8将监测的挂车车尾至障碍物之间的距离信息通过挂车扩展模块7传输至tebs控制器4中,tebs控制器4结合距离信息与挂车车辆的轮速信号,进行数据处理;
47.s3、tebs控制器4检测挂车车辆有无加速信号,即司机是否有意图持续踩踏油门踏板,若无,则进行第四步,若有,则进行第五步;
48.s4、设定一个轮速数值,tebs控制器4检测挂车车辆的当前轮速信号,若当前轮速信号大于设定的轮速数值,挂车扩展模块7发送间歇式制动需求给tebs控制器4,使车速保持在设定的轮速数值,若当前轮速信号小于设定的轮速数值,则判断挂车车辆的车尾与障碍物之间的距离是否在tebs控制器4预设的安全阈值内,若在安全阈值内,则继续倒车,若不在安全阈值内,则tebs控制器4控制弹簧制动气室5采取制动,刹停挂车车辆;
49.s5、设定一个加速轮速数值,tebs控制器4检测挂车车辆的当前轮速信号,若此时的轮速信号持续大于设定的加速轮速数值,则tebs控制器4退出倒车辅助模式。
50.上述的tebs控制器4全称为挂车电子制动系统,是由克诺尔基于abs防抱死系统进化而来,不仅包含abs功能,而且针对智能挂车趋势增加额外的辅助功能,包括挂车防侧翻系统(trsp)、电子制动力分配系统、空气悬架智能控制系统,以及挂车环境监控系统(包含胎温胎压tpms系统,摩擦片监控,倒车雷达等),帮助车辆极大程度的提升了行车的安全性与稳定性。
51.具体实施时,采用上述控制方法来对挂车倒车辅助系统进行控制,对挂车车辆在倒车途中的情况进行分析,并确定相应动作,维护车辆安全。
52.本实用新型通过挂车扩展模块7与超声波测距模块8采集安全距离信息,通过can
总线发送至tebs控制器4中,tebs控制器4通过控制电磁阀来实现倒车速度管控和防碰撞主动刹车功能,且设有智能监控设备1,通过指示灯3和蜂鸣器2起到报警作用,使挂车在装卸货物时,安全性能和智能化程度得到提升。
53.需要强调的是,本实用新型所述的实施例是说明性的,而不是限定性的,因此本实用新型并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本实用新型的技术方案得出的其他实施方式,同样属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。