1.本发明涉及矿产边界检测领域,具体涉及一种基于人工智能的矿产边界检测方法及系统。
背景技术:
2.矿产资源是人类社会赖以生存的一种重要物质基础,是国家安全与经济发展的重要保证。露天开采的矿层,要求圈定矿体的四周边界和露天采场所及的矿体底部边界,它们是确定露天采场边界的重要依据;对地下开采的矿层,要求控制矿体走向的端部和上下边界及其延深情况。这些是确定开采井口位置、开拓巷道和采场布置等所必需的地质资料依据。传统矿产边界的获取方案基于钻探和爆破收集传感器反馈的数据,并根据数据分析进行矿层边界的确定。这类方法成本高,安全性低。
技术实现要素:
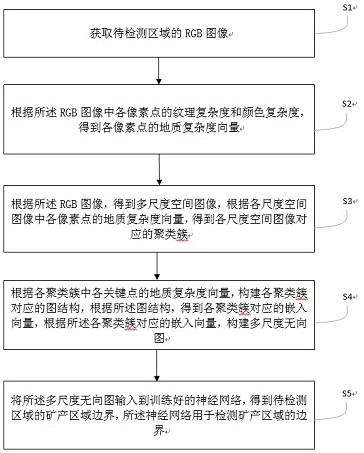
3.为了解决传统方法检测矿产边界安全性低的问题,本发明的目的在于提供一种基于人工智能的矿产边界检测方法及系统,所采用的技术方案具体如下:第一方面,本发明提供了一种基于人工智能的矿产边界检测方法,该方法包括以下步骤:获取待检测区域的rgb图像;根据所述rgb图像中各像素点的纹理复杂度和颜色复杂度,得到各像素点的地质复杂度向量;根据所述rgb图像,得到多尺度空间图像,根据各尺度空间图像中各像素点的地质复杂度向量,将地质复杂度大于设定复杂度阈值的像素点记为关键点;对各尺度空间图像对应的关键点进行聚类,得到各尺度空间图像对应的聚类簇;根据各聚类簇中各关键点的地质复杂度向量,构建各聚类簇对应的图结构,根据所述图结构,得到各聚类簇对应的嵌入向量,根据所述各聚类簇对应的嵌入向量,构建多尺度无向图;将所述多尺度无向图输入到训练好的神经网络,得到待检测区域的矿产区域边界,所述神经网络用于检测矿产区域的边界。
4.第二方面,本发明提供了一种基于人工智能的矿产边界检测系统,包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现上述所述的基于人工智能的矿产边界检测方法。
5.优选的,所述rgb图像中各像素点的纹理复杂度和颜色复杂度的计算方法包括:采用ltp三值编码对各像素点处理,得到各像素点的ltp值;根据所述各像素点的ltp值,得到各像素点的纹理复杂度;获取各像素点对应lab空间的三个通道值,根据所述各像素点对应lab空间的三个通道值,得到各像素点对应的颜色复杂度。
6.优选的,根据所述各像素点对应lab空间的三个通道值,得到各像素点对应的颜色复杂度的方法包括:根据各像素点对应lab空间的三个通道值,构建各像素点的颜色向量;根据各像素点的颜色向量,计算各像素点与其对应的邻域像素点的颜色差值向量;对各像素点与其对应的邻域像素点的颜色差值向量求和,得到各像素点的颜色变化量,将各像素点的颜色变化量作为对应像素点的颜色复杂度。
7.优选的,根据各尺度空间图像中各像素点的地质复杂度向量,得到各尺度空间图像对应的聚类簇的方法包括:根据各像素的地质复杂度特征向量,采用orb算法得到各尺度空间图像中对应的关键点;采用dbscan聚类方法对所述各层次图像中对应的关键点进行聚类,得到所述多尺度空间各层次图像对应的聚类簇。
8.优选的,根据各聚类簇中各关键点的地质复杂度向量,构建各聚类簇对应的图结构的方法包括:获取所述各聚类簇中各关键点的地质复杂度向量,计算所述各尺度空间图像对应的关键点之间的余弦相似度;构建各聚类簇对应的图结构:将各尺度空间图像对应的关键点作为图结构的节点,将各尺度空间图像对应的关键点的地质复杂度向量作为图结构中对应节点的特征值,将所述余弦相似度作为图结构中对应节点之间的边权值。
9.优选的,所述神经网络的训练方法包括:采集多张地质图像作为神经网络的训练集,给所述地质图像打上对应的标签,所述标签为矿产区域的边界;根据训练集以及训练集中各图像对应的标签,对神经网络进行训练。
10.本发明具有如下有益效果:本发明获取了待检测区域的rgb图像中各像素点的纹理复杂度和颜色复杂度,根据纹理复杂度和颜色复杂度构建各像素点的地质复杂度向量,相较于单一的灰度信息或颜色信息表征各像素点的特征精准度更高,由于监控相机在移动监控的过程中由于对焦延迟会出现图像模糊的问题,本发明获取了待检测区域的多尺度空间图像,相对于单一尺度的图像,多尺度空间图像具有较好的抗模糊能力,本发明对各尺度空间图像中的关键点进行聚类,得到各尺度空间图像对应的聚类簇,将各尺度空间中的各聚类簇转换为嵌入向量,根据各聚类簇对应的嵌入向量,构建多尺度无向图,将多尺度无向图输入到训练好的神经网络,得到矿产区域的边界。本发明利用纹理复杂度与色彩复杂度结合的方式构建地质复杂度向量,能够全面地表征矿层特征,本发明构建的多尺度无向图考虑了各尺度图像中关键点之间的互相关性以及多尺度空间中各簇内关键点之间的互相关性,提取到的多尺度无向图特征具备尺度不变性,提高了待检测区域的矿产边界准确性,本发明提供的方法无需基于钻探和爆破收集传感器反馈的数据,进而得到矿产区域的边界,提高了矿产边界检测过程的安全性。
附图说明
11.为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
12.图1为本发明一个实施例所提供的一种基于人工智能的矿产边界检测方法的流程图;图2为本发明一个实施例所提供的待检测区域的原图像示意图;图3为待检测区域原图像关键点的示意图;图4为对原图像隔点下采样得到的关键点图像示意图;图5为对图4隔点下采样得到的关键点的图像示意图;图6为对图5隔点下采样得到的关键点图像示意图。
具体实施方式
13.为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种基于人工智能的矿产边界检测方法及系统进行详细说明如下。
14.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
15.下面结合附图具体的说明本发明所提供的一种基于人工智能的矿产边界检测方法及系统的具体方案。
16.基于人工智能的矿产边界检测方法实施例现有技术基于钻探和爆破收集传感器反馈的数据,并对数据进行分析获取矿产区域的边界,安全性较低。为了解决上述问题,本实施例提出了基于人工智能的矿产边界检测方法,如图1所示,本实施例的基于人工智能的矿产边界检测方法包括以下步骤:步骤s1,获取待检测区域的rgb图像。
17.本实施例用监控相机对待检测区域进行移动采集,以监控相机采集到待检测区域的一张图像为例进行后续处理,待检测区域的原图像如图2所示,图中颜色较浅的区域为矿产资源。利用自适应边缘插值算法对矿产区域图像的边缘和纹理特征进行增强,得到增强后待检测区域rgb格式的视频帧。边缘自适应插值是公知技术,此处不再赘述。
18.步骤s2,根据所述rgb图像中各像素点的纹理复杂度和颜色复杂度,得到各像素点的地质复杂度向量。
19.本实施例采用ltp三值编码模式对矿产区域的rgb图像中各像素点进行处理,得到各像素点对应的ltp值。ltp三值编码模式为公知技术,此处不再赘述。
20.对于(x,y)像素点,计算其邻域八个像素点的ltp值与其ltp值之差,本实施例将该像素点与其邻域内像素点之间连线的延长线作为坐标轴,规定由该像素点指向其邻域像素点的方向作为该坐标轴的正方向,该像素点的ltp值与其邻域像素点ltp值之间差值的绝对值作为该差值向量的模长,若其邻域像素点的ltp值大于该像素点的ltp值,则该向量的方向与坐标轴正方向同向;反之,该向量的方向与坐标轴正向相反。最终得到八个差值向量,
将这八个差值向量作为一个集合,记为,这八个差值向量反映该像素点在其邻域八个方向上的纹理变化量。其纹理复杂度表示为:其中,为(x,y)像素点在其邻域方向上的差值向量之和,为(x,y)像素点在第个邻域像素点方向上的差值向量。
21.将各像素点的ltp值和各像素点在其邻域八个方向上的差值向量之和作为对应像素点的纹理复杂度,具体表示为:其中,为(x,y)像素点的纹理复杂度,为(x,y)像素点的ltp值。
22.本实施例利用像素级信息,对色彩变化方向进行描述,具体来说,根据各像素点在lab空间的三个通道值构建各像素点的颜色向量,各像素点的颜色向量表示为:其中,为(x,y)像素点的颜色向量,为(x,y)像素点的亮度,为(x,y)像素点从绿色到红色的分量,为(x,y)像素点从蓝色到黄色的分量。
23.计算各像素点对应的邻域八个像素点的颜色向量与其颜色向量之差,得到颜色向量的差值向量,该差值向量反映该像素点在对应邻域点方向上lab颜色变化量,对各像素点在其八个邻域方向上的lab颜色变化量求和,得到各像素点的颜色复杂度,对于(x,y)像素点,其颜色复杂度表示为。
24.纹理复杂度包含地质的岩相和纹理变化方向,岩相表征地质的纹理特征,纹理变化方向表征矿层纹理的走势和地质结构的信息;颜色复杂度表征岩层的种类,即矿产信息和岩性。本实施例将各像素点对应的纹理复杂度和颜色复杂度作为对应像素点的地质复杂度向量,相较于单一的灰度信息或颜色信息表征各像素点的特征,其内容更加丰富,基于此指标进行后续分类任务时,可确保分类精准度更高。地质复杂度向量可表示为:其中,为(x,y)像素点的地质复杂度向量。
25.步骤s3,根据所述rgb图像,得到多尺度空间图像,根据各尺度空间图像中各像素点的地质复杂度向量,将地质复杂度大于设定复杂度阈值的像素点记为关键点;对各尺度空间图像对应的关键点进行聚类,得到各尺度空间图像对应的聚类簇。
26.监控相机在移动监控的过程中可能会出现对焦延迟,进而导致图像模糊,因此本实施例构建多尺度空间,用以模拟视频帧可能出现的失焦情况。在多尺度空间中提取到的特征,在融合之后具备尺度不变性,因此,相较于单一尺度的特征,多尺度特征具备良好的
抗模糊能力,即抗噪性。
27.具体来说,对于每一帧图像利用隔点下采样构建多尺度空间,本实施例下采样间隔为一个像素点,得到多尺度空间的四个尺度图像,各尺度图像具备不同的分辨率,以模拟生理视觉的近大远小特点。
28.本实施例采用orb算法,基于各像素对应的地质复杂度向量提取各尺度图像对应的关键点,关键点表征各尺度图像地质复杂度变化较高的像素点,即将地质复杂度大于设定复杂度阈值的像素点记为关键点,图3为待检测区域原图像关键点的示意图,图4为对原图像隔点下采样得到的关键点图像示意图,图5为对图4隔点下采样得到的关键点的图像示意图,图6为对图5隔点下采样得到的关键点图像示意图,图中较白的点为关键点。各尺度图像关键点的集合反映对应尺度图像的地质复杂度信息。采用dbscan聚类的方法对各尺度图像中对应的关键点分别进行聚类,得到各层次图像对应的聚类簇,本实施例设定dbscab的邻域半径eps=4,最小密度阈值,在具体应用中,可根据实际需要进行设定。orb算法和dbscan聚类为公知技术,此处不再赘述。
29.步骤s4,根据各聚类簇中各关键点的地质复杂度向量,构建各聚类簇对应的图结构,根据所述图结构,得到各聚类簇对应的嵌入向量,根据所述各聚类簇对应的嵌入向量,构建多尺度无向图。
30.离散的关键点没有考虑各关键点之间的相关性,对于图像整体地质复杂度的描述不够全面,而无向图的拓补结构能够有效地表征无向图中每个节点之间的互相关性,因此,本实施例为各尺度图像中的每个簇构建图结构,以弥补离散的点集特征存在的缺陷。
31.具体来说,将各尺度图像中每个簇内所有关键点的特征值作为一个集合,即其中,为第i个尺度图像中第j个簇内各关键点的特征值构成的集合,为第i个尺度图像中第j个簇内第n个关键点的地质复杂度向量。
32.将各尺度图像中各簇内的关键点作为图结构的节点,将关键点之间的余弦相似度作为对应节点之间的边权值,计算各尺度图像中各簇内关键点之间的余弦相似度,将各尺度图中每个簇内所有节点之间的边权值作为一个集合,即其中,为第i个尺度图像中第j个簇内边权值的集合;为第i个尺度图像中第j个簇内第个关键点与第n个节点之间的边权值。
33.对于各尺度图像中的每个簇,构建一个图结构,表征簇内各关键点之间的互相关性,即其中,为第i个尺度图像中第j个簇构成的图结构,为第i个尺度图像中第j个簇内所有关键点之间的边权值构成的集合。
34.后续步骤中需要将多尺度空间中每个簇构成的图结构作为一个节点,进而构建多
尺度无向图结构,而多层嵌套图结构会造成维度灾难,计算极其复杂,因此在构建多尺度无向图之前,利用图嵌入方法,将各尺度图像中的各簇对应的图结构转换为低维向量。本实施例利用graph2vec方法进行图嵌入,输出各簇对应的图结构的嵌入向量,即输入为,输出为,为第i个尺度图像中第j个簇的嵌入向量。
35.对于多尺度空间所有的嵌入向量,构建多尺度无向图结构。具体来说,将每个嵌入向量作为无向图的节点,节点包含的数据为嵌入向量,节点之间的边权为嵌入向量互相之间的余弦相似度。嵌入向量之间余弦相似度的计算公式如下:其中,为第a个尺度图像中第b个图结构对应的嵌入向量,代表与之间的余弦相似度。
36.步骤s5,将所述多尺度无向图输入到训练好的神经网络,得到待检测区域的矿产区域边界,所述神经网络用于检测矿产区域的边界。
37.本实施例采集多张地质图像作为神经网络的训练集,给地质图像打上对应的标签,标签为矿产区域的边界,为了提高神经网络的准确性,本实施例采集的地质图像包括矿产图像、边界图像、地层图像,利用训练集对神经网络进行训练。
38.将待检测区域的多尺度无向图输入到训练好的神经网络,本实施例的神经网络为gnn网络,激活函数使用relu函数,损失函数使用交叉熵函数,输出为待检测区域的矿产区域边界。
39.本实施例获取了待检测区域的rgb图像中各像素点的纹理复杂度和颜色复杂度,根据纹理复杂度和颜色复杂度构建各像素点的地质复杂度向量,相较于单一的灰度信息或颜色信息表征各像素点的特征精准度更高,由于监控相机在移动监控的过程中由于对焦延迟会出现图像模糊的问题,本实施例获取了待检测区域的多尺度空间图像,相对于单一尺度的图像,多尺度空间图像具有较好的抗模糊能力,本实施例对各尺度空间图像中的关键点进行聚类,得到各尺度空间图像对应的聚类簇,将各尺度空间中的各聚类簇转换为嵌入向量,根据各聚类簇对应的嵌入向量,构建多尺度无向图,将多尺度无向图输入到训练好的神经网络,得到矿产区域的边界。本实施例利用纹理复杂度与色彩复杂度结合的方式构建地质复杂度向量,能够全面地表征矿层特征,本实施例构建的多尺度无向图考虑了各尺度图像中关键点之间的互相关性以及多尺度空间中各簇内关键点之间的互相关性,提取到的多尺度无向图特征具备尺度不变性,提高了待检测区域的矿产边界准确性,本实施例提供的方法无需基于钻探和爆破收集传感器反馈的数据,进而得到矿产区域的边界,提高了矿产边界检测过程的安全性。
40.基于人工智能的矿产边界检测系统实施例本实施例基于人工智能的矿产边界检测系统包括存储器和处理器,所述处理器执行所述存储器存储的计算机程序,以实现上述所述的基于人工智能的矿产边界检测方法。
41.由于基于人工智能的矿产边界检测方法已经在基于人工智能的矿产边界检测方法实施例中进行了说明,所以本实施例不再对基于人工智能的矿产边界检测方法进行赘
述。
42.需要说明的是:以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。