1.本发明涉及无人驾驶技术领域,具体来说,涉及一种基于点云特征与蒙特卡洛扩展法的动态物体去除。
背景技术:
2.伴随着人工智能技术在移动机器人领域上的快速发展,尤其在无人驾驶技术领域上体现出了其巨大的发展潜能和应用价值。同时定位与地图构建(simultaneous localization and mapping或slam)作为无人驾驶的核心技术,在车辆定位和导航上发挥着不可或缺的作用。slam技术是指主体在运动当中通过传感器获取信息,来确定自身位姿并构建环境地图的过程,由此来解决主体在未知环境下运动时的定位与建图问题。
3.其中,slam技术的前端视觉里程计(vo)和slam技术在机器人和计算机视觉等科学技术领域占有的地位越来越重要。在最近这些年,有多种slam技术和视觉里程计(vo)都取得了非常理想的实验结果,并且在移动机器人自身状态估计、导航避障、地图构建上都取得了突破性的进展。但是,slam过程经常出现动态物体,动态物体对算法的干扰较强,会影响里程计准确度,产生点云中的“鬼影”问题,需要有效地剔除。
4.在最近这些年,伴随着深度视觉应用的快速进步与发展,深度图像的图像分辨率、设备分辨率和屏幕分辨率都取得了很大程度上的进步。因此,有许多基于深度图像的视觉里程计算法被提出,比如sdf tracker、kinect fusion和sdo等等。但是这些算法只是估计了前后俩帧之间相互运动关系,并不能对slam过程中的动态物体进行去除。因此,本发明提出了一种基于点云特征与蒙特卡洛扩展法的动态物体去除。
技术实现要素:
5.针对于相关技术可能出现的问题,本发明提出了一种基于点云特征与蒙特卡洛扩展法的动态物体去除,解决slam过程中动态物体存在导致的测量精度和效率低的问题。
6.为了实现上述技术目的,本发明的技术方案是这样实现的:
7.采用了以点云特征与蒙特卡洛扩展法的动态物体去除的方法,包括以下步骤:
8.步骤一,构建点云数据样本数据集,并构建三维的全局坐标系,初始化环境信息。
9.步骤二,提取全局坐标系下的点云数据并计算其局部曲率、惯性张量矩阵和协方差矩阵作为点云空间分布特征。
10.步骤三,搭载点云滤波器进行预处理,去除孤立点和边缘点。
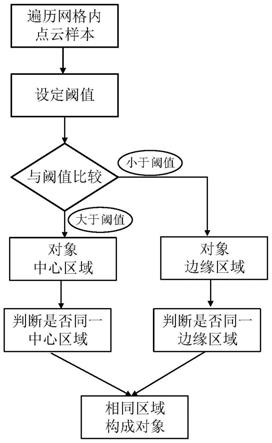
11.步骤四,创新性地提出了一种从中心到边缘的点云聚类算法,对预处理后的点云数据基于新设计的点云聚类算法聚类并确定对象的轮廓。
12.步骤五,使用蒙特卡洛法对全概率公式进行改进,并递推和计算出点云粒子的影响权重,推断聚类对象状态,动态对象去除,静态对象保留。有效的去除了物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。
13.本发明的有益效果:基于点云特征与蒙特卡洛扩展法的动态物体去除解决了slam
过程动态物体对系统精度的影响,解决了slam生成点云中的“鬼影”问题,使得slam系统可以克服复杂环境中的动态环境的影响,进一步提高slam系统的精确性和鲁棒性。
附图说明
14.为了更清楚地说明本发明实例或现有技术中技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些措施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1为从中心到边缘的点云聚类算法流程图。
16.图2为基于点云特征与蒙特卡洛扩展法的动态物体去除的流程图。
具体实施方式
17.下面结合附图和实施例对本发明的实施方式作进一步详细描述。
18.根据本发明实施例所述的一种基于点云特征与蒙特卡洛扩展法的动态物体去除的方法,包括以下步骤:
19.步骤一,构建点云数据样本数据集,并构建三维的全局坐标系,初始化环境信息。为防止由于采集的部分点云数据高度过高或过低导致的垂直方向上的分段不足,将垂直方向上超过某个阈值的点删除。在三维空间坐标系下,将实时的点云数据投影到xy平面上的2d网格图上(保留高度值,反射强度信息)。
20.步骤二,提取全局坐标系下的点云数据并计算其局部曲率、惯性张量矩阵和协方差矩阵作为点云空间分布特征。并对所求局部曲率的大小进行划分,从小到大依次为孤立点、边缘点、棱点以及平面点。假设pi=(xi,yi,zi)
t
是网格内的一个点云数据,p
i 1
,p
i 2
,
…
p
i n
分别为点云pi后n个邻点,p
i-1
,p
i-2
…
p
i-n
分别为点云pi的前n个邻点,这些点共同构成pi的邻域点。激光点的局部曲率可以定义为:
[0021][0022]
根据所求惯性张量矩阵m和协方差矩阵c描绘点云的形状特征。
[0023][0024][0025]
步骤三,搭载点云滤波器进行预处理,去除孤立点和边缘点。将三维空间的点云投
影到xoy平面,并基于x方向和y方向的距离均匀网格化,将每个网格的尺寸设置为0.2m
×
0.2m,去除孤立点和边缘点后,仍能确保每个网格内至少要有一个棱点或平面点。测量的环境地面非平整时,则网格的长度应设置得小一些,反之,测量的环境地面相对平坦,则网格的长度应设置得大一些。遍历当前帧点云的x值和y值,获取x轴上最大值和最小值,分别记为x
max
和x
min
,获取y轴上最大值和最小值,分别记为y
max
和y
min
。考虑每个网格大小为i
x
×iy
,其中i
x
为单个网格在x轴方向的长度,iy为单个网格在y轴方向的长度。那么对该帧点云总共建立m
×
n个网格。
[0026]
其中,
[0027]
步骤四,创新性地提出了一种从中心到边缘的点云聚类算法,对预处理后的点云数据基于新设计的点云聚类算法聚类并确定对象的轮廓。首先,遍历网格图内的点云,连接点云密度大于阈值的网格,获取所需对象的中心区域。传感器到任意两个中心点云之间的夹角记为β,距离分别d1和d2,为如果夹角β小于给定阈值θ,判断两点为不同对象,如果夹角β大于给定阈值θ,判断两点为不同对象。利用公式进一步对非中心点云处理,确定边缘点云。从而从对象的中心区域周围获取精确的边缘区域,组合对象的中心区域和边缘区域,从而获得一个完全独立的对象。
[0028][0029]
步骤五,使用蒙特卡洛法对全概率公式进行改进,并递推和计算出点云粒子的影响权重,推断聚类对象状态,动态对象去除,静态对象保留。
[0030]
根据全概率公式,系统当前的期望状态可以表示为:
[0031][0032]
上式中,q(x
t
|z
1:t
)为建议分布,w(x
t
)表示每一个粒子的权重。根据后验概率公式p(z
1:t
)=∫p(z
1:t
|x
t
)p(x
t
)dx
t
并采用蒙特卡洛法对全概率公式的积分部分求解,得到改进后的系统期望状态:
[0033][0033]
其中,i是样本的序号,是归一化之后的权重。为了提高效率,可以通过递推的方式更新点云粒子的权重:
[0034][0035]
最后,归一化每个对象中的点云粒子的影响权重,累加所有点云粒子的影响权重并求均值作为系统状态的估计值,根据估计值判断聚类对象是否动态,动态对象去除,静态对象保留。有效的去除物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。
[0036]
本发明的优点在于:
[0037]
本发明将解决slam视觉里程计过程中的动态点问题,设计了一种基于点云特征与蒙特卡洛扩展法的动态物体去除方法,首先,初始化环境信息,计算点云的局部曲率、惯性张量矩阵和协方差矩阵,将其作为点云的空间分布特征,然后通过点云滤波器进一步预处理,可以有效地去掉一些干扰和噪声。创新性地提出了一种从中心到边缘的点云聚类算法,对预处理后的点云数据基于新设计的点云聚类算法聚类并确定对象的轮廓。使用蒙特卡洛法对全概率公式进行改进,并递推和计算出点云粒子的影响权重,推断聚类对象状态,动态对象去除,静态对象保留。
[0038]
本发明有效的去除了物理环境中移动物体的动态信息,得到了一个真实的静态物理环境。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。