技术特征:
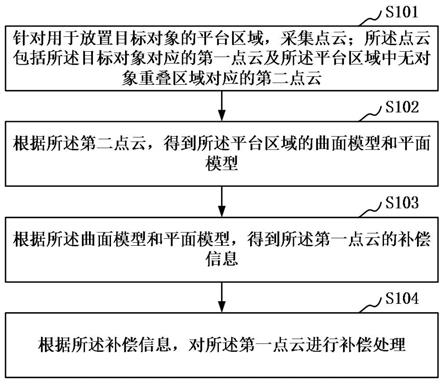
1.一种点云补偿方法,其特征在于,所述方法包括:针对用于放置目标对象的平台区域,采集点云;所述点云包括所述目标对象对应的第一点云及所述平台区域中无对象重叠区域对应的第二点云;根据所述第二点云,得到所述平台区域的曲面模型和平面模型;根据所述曲面模型和平面模型,得到所述第一点云的补偿信息;根据所述补偿信息,对所述第一点云进行补偿处理。2.根据权利要求1所述的方法,其特征在于,所述根据所述曲面模型和平面模型,得到所述第一点云的补偿信息,包括:根据所述曲面模型,得到所述平台区域中对象重叠区域对应的曲面点云,以及,根据所述平面模型,得到所述平台区域中对象重叠区域对应的平面点云;根据所述曲面点云和平面点云,得到所述第一点云的补偿信息。3.根据权利要求1所述的方法,其特征在于,根据所述第二点云,得到所述平台区域的曲面模型,包括:从所述第二点云中选取部分第二点云,利用最小二乘法对所述部分第二点云进行多曲线拟合处理,得到多曲线模型;根据所述多曲线模型,得到所述平台区域的曲面模型。4.根据权利要求1所述的方法,其特征在于,根据所述第二点云,得到所述平台区域的平面模型,包括:利用最小二乘法对所述第二点云进行平面拟合处理,得到所述平台区域的平面模型。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:根据点的高度信息,确定所述点云中的所述第一点云和第二点云。6.根据权利要求5所述的方法,其特征在于,所述根据点的高度信息,确定所述点云中的所述第一点云和第二点云,包括:对所述点云进行平面拟合处理,得到所述平台区域的基准面;根据与所述基准面之间的高度是否满足高度阈值条件,将所述点云中的点划分至所述第一点云或第二点云。7.根据权利要求1至6任意一项所述的方法,其特征在于,所述根据所述补偿信息,对所述第一点云进行补偿处理,包括:根据所述补偿信息对所述第一点云进行补偿处理,得到所述目标对象对应的第三点云;基于所述第三点云,获取所述目标对象的平面度。8.一种点云补偿装置,其特征在于,所述装置包括:点云采集模块,用于针对用于放置目标对象的平台区域,采集点云;所述点云包括所述目标对象对应的第一点云及所述平台区域中无对象重叠区域对应的第二点云;模型得到模块,用于根据所述第二点云,得到所述平台区域的曲面模型和平面模型;信息得到模块,用于根据所述曲面模型和平面模型,得到所述第一点云的补偿信息;补偿处理模块,用于根据所述补偿信息,对所述第一点云进行补偿处理。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序
被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。11.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及智能制造技术领域,提供了一种点云补偿方法、装置、计算机设备、存储介质和计算机程序产品。本申请能够实现提高对目标对象的点云进行补偿处理的准确性。该方法包括:针对用于放置目标对象的平台区域,采集点云,点云包括目标对象对应的第一点云及平台区域中无对象重叠区域对应的第二点云,根据第二点云,得到平台区域的曲面模型和平面模型,根据曲面模型和平面模型,得到第一点云的补偿信息,根据补偿信息,对第一点云进行补偿处理。对第一点云进行补偿处理。对第一点云进行补偿处理。
技术研发人员:梁航 肖寒 刘枢 吕江波 沈小勇
受保护的技术使用者:北京思谋智能科技有限公司
技术研发日:2022.04.24
技术公布日:2022/5/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。