1.本实用新型涉及射击模拟演练设备技术领域,尤其涉及一种智能机器人靶车。
背景技术:
2.射击训练大多基于固定靶标开展,严重脱离真实目标随机运动的实战背景。目前使用的移动靶标运动轨迹单一、可带靶标单一、适应场地单一,尤其不能模拟复杂的多目标实战背景,且对射击人员射击技能缺乏实时反馈和针对性提升建议,导致参训人员训练水平低于实战水平,且射击技能提升缺乏理论引导和数据支撑,应对实战的能力水平很难得到本质改善。
技术实现要素:
3.为解决上述技术问题,本实用新型实施例期望提供一种具有三维变靶能力的智能机器人靶车。
4.本实用新型的技术方案是这样实现的:
5.一种智能机器人靶车,包括机器人主体、设于所述机器人主体下的运动装置、转动连接于所述机器人主体上的回转机构以及可摆动地连接于所述回转机构上的靶标机构,所述运动装置用于驱动所述机器人主体运动。
6.优选的,所述回转机构包括连接于所述机器人主体上的回转盘、设于所述回转盘上方的固定块以及连接所述回转盘和所述固定块的转动轴,所述靶标固定于所述固定块上,所述回转盘转动,带动所述转动轴转动并带动固定块转动,进而带动所述靶标机构转动。
7.优选的,所述回转盘的旋转角度为360度。
8.优选的,所述靶标机构包括靶体、靶杆和转动驱动器,所述转动驱动器固定在所述固定块上,所述靶杆的一端连接于所述转动驱动器、另一端连接所述靶体,所述转动驱动器转动以带动所述靶杆摆动角度。
9.优选的,所述靶杆为两根,所述转动驱动器为一个,所述靶杆固定连接于所述转动驱动器的转动轴上,所述转动驱动器带动两个靶杆同时转动。
10.优选的,所述转动驱动器为电机,所述靶杆固定连接于电机轴上,所述回转机构上还设置有轴承座,所述电机轴的端部装配于所述轴承座。
11.优选的,所述运动装置包括驱动电机以及车轮,所述车轮设于所述机器人主体下,所述驱动电机驱动所述车轮转动。
12.优选的,所述机器人主体包括壳体以及设于所述壳体内的主控制器、遥控接收单元、旋转控制单元、运动驱动单元、导航单元、语音播报单元和自动感应单元,所述主控制器与所述控接收单元、旋转控制单元、运动驱动单元、导航单元和语音播报单元连接用于控制所述遥控接收单元、所述旋转控制单元、所述运动驱动单元、所述导航单元、所述语音播报单元和自动感应单元。
13.优选的,所述壳体安装有各个单元的标准接口,所述标准接口用于与外围设备相连接。
14.本实用新型实施例提供的智能机器人靶车通过所述回转机构带动所述靶标机构在所述机器人主体上360度旋转,同时,可摆动的靶标机构连接在所述回转机构上,使得靶标机构具有三维变靶能力,更加逼真的模拟了实战目标动作,改善了模拟演练的效果。
附图说明
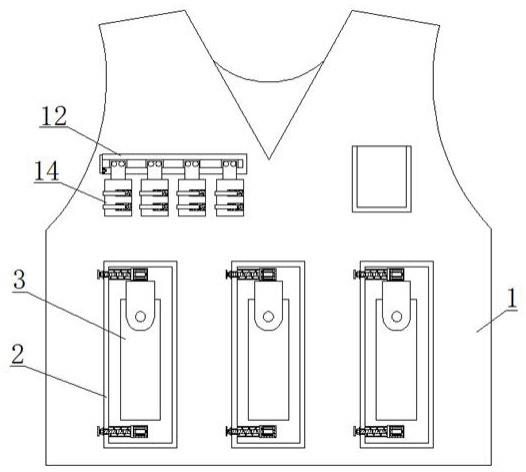
15.图1为本实用新型提供的智能机器人靶车的结构示意图;
16.图2为图1所示的智能机器人靶车的靶标机构起倒变化结构图;
17.图3和图4分别为图1所示的智能机器人靶车的部分结构示意图;
18.图5为本实用新型提供的智能机器人靶车的工作原理图。
具体实施方式
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1-图4。该智能机器人靶车包括机器人主体1、设于所述机器人主体1下的运动装置3、转动连接于所述机器人主体1上的回转机构5以及可摆动地连接于所述回转机构5上的靶标机构7,所述运动装置3用于带动所述机器人主体1运动,通过所述回转机构5带动所述靶标机构7在所述机器人主体1上360度旋转,同时,可摆动的靶标机构7连接在所述回转机构5上,使得靶标机构7具有三维变靶能力,更加逼真的模拟了实战目标动作,改善了模拟演练的效果。
21.请参阅图3,所述回转机构5包括安装于所述机器人主体1上的回转盘51、设于所述回转盘51上方的固定块53以及两端分别连接所述回转盘51和所述固定块53的转动轴55,所述靶标固定于所述固定块53上,所述回转盘360度转动,带动所述转动轴55转动并同时带动固定块53转动,进而带动所述靶标机构7转动,形成了所述靶标机构7的360度回转运动,模拟实战目标更逼真。
22.请参阅图3和图4,所述靶标机构7包括靶体71、靶杆73和转动驱动器75,所述转动驱动器75固定在所述固定块53上,所述靶杆73的一端连接于所述转动驱动器75、另一端连接所述靶体71,所述转动驱动器75转动来带动所述靶杆73摆动角度,所述靶杆73左右摆动角度,靶体71形成起倒变化,在回转机构360度转动的同时实现起倒动作,具备三维变靶能力,更加逼真的模拟了实战目标动作。
23.具体的,在本实施例中,所述靶杆73为两个,所述转动驱动器75为一个,所述靶杆固定连接于所述转动驱动器的转动轴上,所述转动驱动器带动两个靶杆同时转动。通过两个靶杆73的设置实现了双杆结构固定靶体71,解决了现有技术中单杆导致的支撑重量轻、靶杆73晃动的问题,增强了变靶运动过程中动作稳定性。在所述转动驱动器75的带动下,所述靶杆形成了摇杆,两个靶杆同时摆动。
24.具体的,在本实施例中,所述转动驱动器75为电机。电机轴77穿过所述固定块53,两个所述靶杆固定连接在电机轴上,所述回转机构的回转盘上还设置有轴承座79,所述轴承座79安装有滚珠轴承,所述电机轴的端部装配于所述滚珠轴承内,电机轴转动,带动所述靶杆发生偏转,在往复转动一定角度的过程中带动所述靶杆往复摆动。通过一个电机来带动两个所述靶杆同时运动,有效地提高了靶杆摆动的稳定性。
25.所述运动装置3包括驱动电机31以及车轮33,所述车轮设于所述机器人主体1下,所述驱动电机驱动所述车轮转动。具体的,每个车轮采用一个驱动电机驱动,采用四轮驱动,能够适用复杂的地形环境,即可在铺装路面、也可在非铺装路面行进,便于模拟实战目标的速度大小、运动轨迹和行进环境。
26.请参阅图5。所述机器人主体1包括壳体11以及设于所述壳体内的主控制器12、遥控接收单元13、旋转控制单元14、运动驱动单元15、导航单元16、语音播报单元17和自动感应单元18,所述主控制器与所述控接收单元、旋转控制单元、运动驱动单元、导航单元和语音播报单元连接用于控制所述遥控接收单元、所述旋转控制单元、所述运动驱动单元、所述导航单元和所述语音播报单元。通过各单元模块的组配,可以实现无线遥控、语音播报、实时感知、轨迹导航、多台编组等功能,突破了当前固定靶和移动靶训练滞后于实战的问题。
27.所述壳体安装有各个单元的标准接口,所述标准接口用于与外围设备相连接。同时,所述壳体集成控制模块成盒状,壳体外侧留有各部件的标准接口,壳体和控制系统功能分离,便于组装、拆卸、运输和制造。
28.具体的,所述主控制器采用arm控制芯片。
29.具体的,所述遥控接收单元为遥控接收器。
30.具体的,所述旋转控制单元为arm控制芯片或者arm控制器,其与所述回转机构5的电机和转动驱动器75连接,用于控制回转机构5和靶标机构7运动。
31.具体的,所述运动驱动单元为控制芯片,该控制芯片与运动装置3的驱动电机相连接,用于控制所述驱动电机动作。
32.具体的,所述导航单元为用于接收gps信号的导航模块。
33.具体的,所述语音播报单元为语音播报器。
34.具体的,所述自动感应单元由图像传感器、超声波雷达和激光雷达等组成,实现避障行驶。
35.本实用新型实施例提供的智能机器人靶车通过所述回转机构5带动所述靶标机构7在所述机器人主体1上360度旋转,同时,可摆动的靶标机构7连接在所述回转机构5上,使得靶标机构7具有三维变靶能力,更加逼真的模拟了实战目标动作,改善了模拟演练的效果。
36.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。