一种基于v2x的红绿灯路口发动机启停智能控制方法及系统
技术领域
1.本发明涉及汽车发动机控制技术领域,具体涉及一种基于v2x的红绿灯路口发动机启停智能控制方法及系统。
背景技术:
2.随着汽车的发展日益智能化,自动驾驶功能在国内外各车型上搭载逐渐增多,汽车发动机的智能控制功能也随之发展。基于车载传感器的发动机智能控制起步早,发展较为完善,但传统传感器感知效果受环境因素影响较大,仅依赖车载传感器难以实现高度智能控制功能。
3.v2x(vehicle to everything)即车与交通者和网络设备之间的通信连接,5g/v2x obu(5g/v2x on board unit)即支持5g的v2x车载单元,得益于通信技术的发展,5g通讯延时较低且具有很高的可靠性,通过5g/v2x obu,车辆可与云端服务器间实现信息交互。
4.传统的汽车发动机启停控制,仅考虑了水温、电池soc(荷电状态)、轮速等,发动机的启停条件均为车辆自身状态,不包括道路环境信息,从而导致驾驶员非预期的进入启停激活工况;并且在某些短时停车工况下,再次启动所需的电量及喷油量已经大于停机期间的节油量,且带来抖动,驾驶体验差。
技术实现要素:
5.本发明要解决的技术问题是:提供一种基于v2x的红绿灯路口发动机启停智能控制方法及系统,利用车载传感器与5g/v2x obu相配合,能够避免发动机短时进入启停后又马上启动,节省燃油,减少车辆振动,带来良好的驾驶体验。
6.为解决上述技术问题,本发明采用的技术方案是:一种基于v2x的红绿灯路口发动机启停智能控制方法,由如下两个步骤组成:
7.s1、信息接收与感知,具体为通过车载摄像装置及车载导航系统确定车辆当前所属车道及前进方向,并利用5g/v2x obu接收红绿灯处云端发送到车端的实时道路环境信息;
8.s2、信息计算与发动机启停控制,具体为根据车道及前进方向信息和所述实时道路环境信息,对当前拥堵程度及通过路口所需时间进行判断,计算出本次停车的预期时长;若所述预期时长大于设定阈值,在自车状态满足发动机停机条件的前提下,允许进入发动机停机模式,否则,发动机持续工作。
9.进一步的,所述信息接收与感知,具体包括如下步骤:
10.s101,接收到停车请求后,车载导航系统依据本车位置判断车辆前方100米距离是否存在红绿灯,若存在,则执行后续步骤s102;否则,不进入发动机启停智能控制,并重新执行步骤s101;
11.s102,启动车载摄像装置对车辆前方进行拍摄;
12.s103,将车辆前方图像定义为当前帧目标,进行图像预处理及roi区域提取;
13.s104,对图像roi区域进行特征比对并结合车载导航系统数据,确定车辆当前所属车道及前进方向;
14.s105,5g/v2x obu接收红绿灯处云端发送的实时道路环境信息;
15.s106,5g/v2x obu将收到的实时道路环境信息通过整车can总线传给车载控制器。
16.进一步的,所述信息计算与发动机启停控制,具体包括如下步骤:
17.s201,车载控制器接收所述实时道路环境信息,并结合车辆当前所属车道及前进方向信息,通过数学模型计算本次停车预期时长;
18.s202,判断所述预期时长是否大于设定阈值,若是,则继续执行步骤s203,若否,则不允许发动机停机;
19.s203,判断自车状态信息是否满足足发动机停机条件,若是,则允许发动机停机,若否,则不允许发动机停机。
20.进一步的,所述实时道路环境信息包括:当前车道红绿灯时长信息与亮灯状态、当前路口车流量、当前车道每秒通过车流量、当前车道等待红绿灯的车辆数量。
21.进一步的,所述自车状态信息包括:包括水温、电池soc、制动踏板状态。
22.进一步的,所述通过数学模型计算本次停车预期时长,具体如下:
23.驾驶员启动车辆所需时间t满足对数正态分布:
[0024][0025]
其中,μ为与当前车道每秒通过车流量c相关的一个函数,f(t)为车辆在时间t时启动的概率,σ为常数;
[0026]
则对驾驶员启动车辆所需时间t进行估计:
[0027][0028]
则对本次停车预期时长t进行估计:
[0029][0030]
其中,tr为红灯剩余时长,m为前方车辆数目。
[0031]
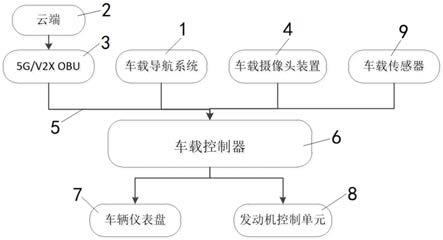
一种基于v2x的红绿灯路口发动机启停智能控制系统,包括接收与感知模块、计算与控制模块;所述接收与感知模块包括:车载导航系统1、云端2、5g/v2x obu3、车载摄像装置4、整车can总线5,车载控制器6感知模块;
[0032]
所述计算与控制模块包括:车辆仪表盘7、发动机控制单元8、车载传感器9、车载控制器6处理模块;
[0033]
所述云端2具体设于红绿灯处,用于采集实时道路环境信息并发送给车端的5g/v2x obu,所述5g/v2x obu设于车辆上,用于接收所述实时道路环境信息;
[0034]
所述车载导航系统1、5g/v2x obu3、车载摄像装置4、车辆仪表盘7、发动机控制单元8、车载传感器9均通过整车can总线5与所述车载控制器6电连接。
[0035]
进一步的,所述车载导航系统1用于识别本车位置和车辆前方红绿灯位置,并将位置信息发送给车载控制器6感知模块;
[0036]
所述车载摄像装置4用于拍摄车辆前方图像,并对所述图像进行预处理及roi区域提取,同时将处理后的图像信息发送给车载控制器6感知模块。
[0037]
进一步的,所述车载传感器9用于实时监控的车辆状态信息,并将所述状态信息发送给车载控制器6处理模块,所述状态信息包括水温、电池soc、制动踏板状态。
[0038]
进一步的,所述车载控制器6感知模块用于对接收的信息进行预处理以确定车辆当前所属车道及前进方向,并将接收的信息发送给车载控制器6处理模块;
[0039]
所述车载控制器6处理模块用于处理车载控制器6感知模块发送的信息,并根据处理结果发送相应的控制指令给车辆仪表盘7和发动机控制单元8。
[0040]
本发明与现有技术相比具有以下主要的优点:
[0041]
1、利用支持5g的v2x车载单元接收云端发送到车端的实时道路环境信息,通过拍摄车辆前方图像的摄像装置及车载导航系统确定所属车道及前进方向,对当前拥堵程度及通过路口所需时间进行判断计算出可能的停车时长,从而对发动机启停进行智能控制,能够避免不必要的启停工况,减少来自动力系统的振动,带来更舒适的驾乘体验;
[0042]
2、通过车载传感器、车载摄像装置、车载控制器与5g/v2x obu相配合,实现车端与云端数据相结合,共同实现发动机启停的智能控制,使发动机启停控制更加精确,进一步优化发动机停机时机,节省燃油,增加电瓶寿命。
附图说明
[0043]
图1为本发明控制方法信息接收与感知流程图;
[0044]
图2为本发明控制方法信息计算与发动机启停控制流程图;
[0045]
图3为本发明驾驶员启动时间对数正态分布图;
[0046]
图4为本发明控制系统示意图。
[0047]
图中:1、车载导航系统;2、云端;3、5g/v2x obu;4、车载摄像装置;5、整车can总线;6、车载控制器;7、车辆仪表盘;8、发动机控制单元;9、车载传感器。
具体实施方式
[0048]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0049]
需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
[0050]
一、一种基于v2x的红绿灯路口发动机启停智能控制方法
[0051]
根据本发明实施的一种基于v2x(vehicle to everything,即车与交通者和网络设备之间的通信连接)的红绿灯路口发动机启停智能控制方法,由如下两个步骤组成:
[0052]
s1、信息接收与感知,具体为通过拍摄车辆前方图像的摄像装置及车载导航系统
确定车辆当前所属车道及前进方向,利用5g/v2x obu(5g/v2x on board unit,即支持5g的v2x车载单元)接收云端发送到车端的实时道路环境信息(如当前车道红绿灯时长信息与亮灯状态、当前路口车流量、当前车道每秒通过车流量、当前车道等待红绿灯的车辆数量信息等);
[0053]
s2、信息计算与发动机启停控制,具体为根据车道及前进方向信息和所述实时道路环境信息,对当前拥堵程度及通过路口所需时间进行判断,计算出本次停车的预期时长;若所述预期时长大于设定阈值,在自车状态满足发动机停机条件的前提下,允许进入发动机停机模式,否则,发动机持续工作。避免不必要的启停工况,减少来自动力系统的振动和节省一部分燃油,带来更舒适的驾乘体验。
[0054]
其中,所述云端为:部署在红绿灯处向车端传输信息的设备和软件;
[0055]
所述发动机启停(start/stop system)为:当车辆行驶过程中临时停车时,可以自动熄火,当需要继续前进的时候,系统会自动重启发动机,可以通过短暂停车的时候发动机自动休眠以达到节油减排的目的。
[0056]
进一步的,如图1所示,所述信息接收与感知,具体包括如下步骤:
[0057]
s101,接收到停车请求后,车载导航系统依据本车位置判断车辆前方100米距离是否存在红绿灯,若存在,则执行后续步骤s102;否则,不进入发动机启停智能控制,并重新执行步骤s101。
[0058]
s102,启动车载摄像装置对车辆前方进行拍摄。
[0059]
s103,将车辆前方图像定义为当前帧目标,进行图像预处理及roi区域提取(特征区域提取)。
[0060]
s104,对图像roi区域进行特征比对并结合车载导航系统数据,确定车辆当前所属车道及前进方向。
[0061]
s105,支持5g的车载v2x单元接收所述红绿灯处云端发送的实时道路环境信息(如当前车道红绿灯时长信息与亮灯状态、当前路口车流量、当前车道每秒通过车流量、当前车道等待红绿灯的车辆数量信息等)。
[0062]
s106,支持5g的车载v2x单元将所收到的实时道路环境信息通过整车can总线传给车载控制器,并进行所述信息计算与发动机启停控制。
[0063]
进一步的,如图2所示,所述信息计算与发动机启停控制,具体包括如下步骤:
[0064]
s201,车载控制器接收所述实时道路环境信息,结合车辆当前所属车道及前进方向信息,通过数学模型计算本次停车可能时长(预期时长)。
[0065]
s202,判断本次停车可能时长(预期时长)是否大于设定阈值,若大于,则继续执行后续步骤,同时在仪表盘上显示允许发动机停机提示;否则,不允许发动机停机,同时在仪表盘上显示不允许发动机停机提示。
[0066]
s203,判断自车状态(如水温、电池soc、制动踏板等条件)是否满足足发动机停机条件,若是,则发动机停机;否则,发动机不停机。
[0067]
更进一步的,计算停车可能时长的数学模型具体如下:
[0068]
如图3所示,驾驶员启动车辆所需时间t(驾驶员启动时间)满足对数正态分布:
[0069][0070]
其中,μ是与当前车道每秒通过车流量c相关的一个函数,f(t)为车辆在时间t时启动的概率,σ为常数。
[0071]
则对驾驶员启动时间t进行估计:
[0072][0073]
则对本次停车可能时长t进行估计:
[0074][0075]
其中,tr为红灯剩余时长,t为驾驶员启动时间,m为前方车辆数目。
[0076]
二、一种基于v2x的红绿灯路口发动机启停智能控制系统
[0077]
基于同一发明构思,本技术实施例还提供了一种基于v2x的红绿灯路口发动机启停智能控制系统,包括接收与感知模块和计算与控制模块。
[0078]
进一步的,所述接收与感知模块用于执行所述步骤s101~s106,具体包括:车载导航系统1,云端2,5g/v2x obu(支持5g的车载v2x单元)3,车载摄像装置4,整车can总线5,车载控制器6感知模块。
[0079]
其中,所述车载导航系统1,用于识别本车位置,并判断车辆前方100米距离是否存在红绿灯,同时将判断结果发送给车载控制器6感知模块;
[0080]
所述云端2为部署在红绿灯处向车端传输信息的设备及其配套软件,用于采集实时道路环境信息(如当前车道红绿灯时长信息与亮灯状态、当前路口车流量、当前车道每秒通过车流量、当前车道等待红绿灯的车辆数量信息等),并发送给车端的5g/v2x obu;
[0081]
所述5g/v2x obu,用于将所收到的实时道路环境信息通过整车can总线5传给车载控制器6感知模块;
[0082]
所述车载摄像装置4,用于对车辆前方进行拍摄,将车辆前方图像定义为当前帧目标,并进行图像预处理及roi区域提取(特征区域提取),同时将处理后的图像以及roi区域信息通过整车can总线5传给车载控制器6感知模块;
[0083]
所述车载控制器6感知模块,用于接收车载导航系统1、云端2、5g/v2x obu、车载摄像装置4传递的数据,并转发给车载控制器6处理模块;同时用于对图像roi区域进行特征比对并结合车载导航系统数据,确定车辆当前所属车道及前进方向,并将车辆当前所属车道及前进方向信息发送给车载控制器6处理模块。
[0084]
更进一步的,所述计算与控制模块用于执行所述步骤s201~s103,具体包括:车辆仪表盘7,发动机控制单元8,车载传感器9、车载控制器6处理模块。
[0085]
其中,所述车辆仪表盘7,用于接收车载控制器6处理模块的指令,并显示相应提示;
[0086]
所述发动机控制单元8,用于接收车载控制器6处理模块的指令,并相应的控制发
动机的启停;
[0087]
所述车载传感器9,用于监控自车状态(如水温、电池soc、制动踏板状态等条件)信息并发送给车载控制器6处理模块;
[0088]
所述车载控制器6处理模块,用于接收所述实时道路环境信息,结合车辆当前所属车道及前进方向信息,通过数学模型计算本次停车可能时长(预期时长);同时判断本次停车可能时长(预期时长)是否大于设定阈值以及自车状态是否满足足发动机停机条件,并根据判断结果发送相应指令给车辆仪表盘7和发动机控制单元8。
[0089]
综上所述,采用本发明的一种基于v2x的红绿灯路口发动机启停智能控制方法及系统:
[0090]
1、利用支持5g的v2x车载单元接收云端发送到车端的实时道路环境信息,通过拍摄车辆前方图像的摄像装置及车载导航系统确定所属车道及前进方向,对当前拥堵程度及通过路口所需时间进行判断计算出可能的停车时长,从而对发动机启停进行智能控制,能够避免不必要的启停工况,减少来自动力系统的振动,带来更舒适的驾乘体验;
[0091]
2、通过车载传感器、车载摄像装置、车载控制器与5g/v2x obu相配合,实现车端与云端数据相结合,共同实现发动机启停的智能控制,使发动机启停控制更加精确,进一步优化发动机停机时机,节省燃油,增加电瓶寿命。
[0092]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。