1.本发明属于桥梁裂缝检测技术领域,涉及一种基于图像技术的桥梁表面裂缝识别方法。
背景技术:
2.在桥梁检测领域,裂缝是评定桥梁技术状况时最为常见的病害。目前裂缝检测绝大部分采用人工检测,即用人工识别裂缝真伪、记录裂缝的位置及走向、测量裂缝的宽度和长度,费工费时检测效率低下。
3.随着无人机等检测机器人平台和图像处理技术的发展,逐渐开始尝试采用检测机器人平台拍摄裂缝照片,再用图像处理技术来分析获取裂缝的相关信息。在桥梁检测中经常会遇到蜘蛛网、杂物、雨水、污渍、人为画线等类似裂缝的桥梁表面附着物或痕迹。区别于人工检测裂缝,检测机器人不能像检测人员一样在现场对裂缝进行判别去伪存真,只能“忠实”的按指令拍摄照片。因此利用图像技术对桥梁表面附着物或痕迹的照片进行裂缝真伪识别是分析获取裂缝相关信息的关键前提条件,目前国内尚无基于图像技术的桥梁表面裂缝真伪识别方法的研究。
技术实现要素:
4.有鉴于此,本发明的目的在于提供了一种识别准确率高的基于图像技术的桥梁表面裂缝识别方法。
5.为达到上述目的,本发明提供如下技术方案:
6.一种基于图像技术的桥梁表面裂缝识别方法,包括以下步骤:
7.一种基于图像技术的桥梁表面裂缝识别方法,其特征在于,包括以下步骤:
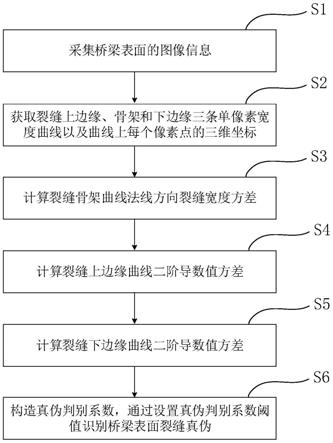
8.步骤s1、采集桥梁表面的图像信息;
9.步骤s2、对采集的图像信息中含有裂缝的图像进行前处理,获取裂缝上边缘、骨架和下边缘三条单像素宽度曲线以及曲线上每个像素点的三维坐标;
10.步骤s3、计算裂缝骨架曲线法线方向裂缝宽度方差;
11.步骤s4、计算裂缝上边缘曲线二阶导数值方差;
12.步骤s5、计算裂缝下边缘曲线二阶导数值方差;
13.步骤s6、分别将法线方向裂缝宽度方差、上边缘曲线二阶导数值方差和下边缘曲线二阶导数值方差乘以相应权重系数后相加构造真伪判别系数,通过设置真伪判别系数阈值识别桥梁表面裂缝真伪。
14.进一步的,在所述步骤s2中,所述前处理包括以下子步骤:
15.子步骤s21、尺寸标定,计算每个像素点的单边尺寸和平面坐标;
16.子步骤s22、裂缝关键信息提取,得到裂缝上边缘、骨架和下边缘三条单像素宽度曲线;
17.子步骤s23、按走向排序,分别按走向计算裂缝上边缘、骨架和下边缘三条单像素
宽度曲线上每个像素点的排列序号;所述三维坐标包括平面坐标和排列序号。
18.进一步的,所述步骤s3包括以下子步骤:
19.子步骤s31、采用三点插值法拟合裂缝骨架曲线函数,求出中间点的法线方程;
20.子步骤s32、分别在裂缝上边缘曲线和裂缝下边缘曲线与法线交点两侧的特定范围内求直线方程代替该处边缘曲线;分别求解出该处裂缝上边缘和裂缝下边缘直线方程与法线方程的交点坐标;
21.子步骤s33、计算两个交点之间的距离作为骨架曲线在该像素点处法线方向的裂缝宽度dn;
22.子步骤s34、重复子步骤s31~子步骤s33,逐个计算出裂缝骨架曲线上第二个像素点至倒数第二个像素点之间各像素点对应的法线方向裂缝宽度dn;
23.子步骤s35、计算法线方向裂缝宽度dn的平均值计算公式如下:
[0024][0025]
子步骤s36、计算法线方向裂缝宽度的方差计算公式如下:
[0026][0027]
其中,2≤n≤n-1,n为裂缝骨架的单像素宽度曲线上像素点的最大排列序号。
[0028]
进一步的,所述步骤s4包括以下子步骤:
[0029]
子步骤s41、采用三点插值法拟合裂缝上边缘曲线函数,并计算中间点处二阶导数值;
[0030]
子步骤s42、重复子步骤s41,逐个计算出裂缝上边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值;
[0031]
子步骤s43、计算上边缘曲线各像素点对应二阶导数值的平均值;
[0032]
子步骤s44、根据上边缘曲线各像素点对应的二阶导数值及上边缘曲线各像素点二阶导数的平均值计算上边缘曲线二阶导数值的方差。
[0033]
进一步的,采用三点插值法拟合裂缝上边缘曲线函数,并计算中间点处二阶导数值的方法为:
[0034]
取裂缝上边缘曲线三个连续像素点,其三维坐标为依次为s
l-1
(x
l-1
,y
l-1
,l-1)、s
l
(x
l
,y
l
,l)、s
l 1
(x
l 1
,y
l 1
,l 1);其中,2≤l≤l-1,l为裂缝上边缘的单像素宽度曲线上像素点的最大排列序号;
[0035]
当x
l-1
、x
l
、x
l 1
均不相等时,通过三点插值法拟合得到的上边曲线函数为y
sl
=ax2 bx c,s
l
(x
l
,y
l
,l)点处的二阶导数为:
[0036]
y”sl
=2a;
[0037]
当x
l-1
=x
l
或x
l
=x
l 1
或x
l-1
=x
l 1
时,设在yox坐标系下通过三点插值法拟合得到的
上边缘曲线函数为求其反函数得到在xoy坐标系下上边缘曲线函数为s
l
(x
l
,y
l
,l)点处的二阶导函数为:
[0038]
若a》0且时,
[0039]
若a》0且时,
[0040]
若a《0且时,
[0041]
若a《0且时,
[0042]
当x
l-1
=x
l
=x
l 1
时,上边缘曲线函数为直线,s
l
(x
l
,y
l
,l)点处的二阶导数为:
[0043]ysl”=0。
[0044]
进一步的,计算上边缘曲线各像素点对应二阶导数值的平均值的计算公式如下:
[0045][0046]
其中,表示上边缘曲线各像素点对应二阶导数值的平均值。
[0047]
进一步的,计算上边缘曲线二阶导数值的方差的计算公式如下:
[0048][0049]
其中其中表示上边缘曲线二阶导数值的方差。
[0050]
进一步的,所述步骤s5包括:
[0051]
采用三点插值法拟合裂缝下边缘曲线函数,逐个计算出裂缝下边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值,并计算下边缘曲线的二阶导数值的方差;计算下边缘曲线二阶导数值的方差的计算公式如下:
[0052][0053]
其中,表示下边缘曲线二阶导数值的方差;y
tm”表示下边缘曲线各像素点对应二阶导数值,表示下边缘曲线各像素点对应二阶导数值的平均值;2≤m≤m-1;m为下边缘曲线像素点的最大排列序号。
[0054]
进一步的,所述步骤s6包括以下子步骤:
[0055]
子步骤s61、设置法线方向裂缝宽度方差的权重系数pd、上边缘曲线二阶导数值方差的权重系数ps和下边缘曲线二阶导数值方差相应的权重系数p
t
的值,其中pd ps p
t
=1;
[0056]
子步骤s62、基于法线方向裂缝宽度方差上边缘曲线二阶导数值方差下边缘曲线二阶导数值方差及权重系数pd、权重系数ps、权重系数p
t
构造真伪判别系数φ;所述真伪判别系数φ的构造公式如下:
[0057][0058]
子步骤s63、设置真伪判别系数阈值φ0,当φ≥φ0时,判定该曲线为真裂缝,当φ《φ0时,判定该曲线为假裂缝。
[0059]
本发明的有益效果在于:
[0060]
1、相较于蜘蛛网、杂物、雨水、污渍、人为画线等类似裂缝的桥梁表面附着物或痕迹,真实裂缝的上、下边缘曲线凹凸变化和法线方向裂缝宽度变化更具随机性,因此这三个参数的离散性是最能判定裂缝真伪的三个特征值。本发明以这三个特征值为基础构造真伪判别系数,全面考虑了判定裂缝真伪的影响因素,提高了识别准确率。
[0061]
2、本发明算法采用三点插值函数拟合出裂缝上、下边缘曲线函数,通过计算裂缝上、下边缘曲线上各像素点(头尾两点除外)的二阶导数,对裂缝上、下边缘曲线变化的凹凸性进行量化处理。
[0062]
3、引入方差概念,通过计算裂缝上、下边缘曲线函数二阶导数和法线方向裂缝宽度的方差值来反映这三个特征值的离散程度。根据这三个特征值对判别裂缝真伪的贡献度不同,引入不同的权重系数更科学的构造真伪判别系数。该算法方便实现程序化,计算效率高。
[0063]
4、本发明还可通过大量试验统计分析不断优化调整,设置更为科学合理的权重系数和真伪判别系数阈值,最大程度的提高真伪识别准确率。
附图说明
[0064]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0065]
图1为本发明基于图像技术的桥梁表面裂缝识别方法的一个优选实施例的流程图。
[0066]
图2为单像素宽度曲线的示意图。
[0067]
图3为裂缝上边缘、骨架和下边缘三条单像素宽度曲线示意图。
具体实施方式
[0068]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0069]
如图1所示,本发明基于图像技术的桥梁表面裂缝识别方法的一个优选实施例包括以下步骤:
[0070]
步骤s1、采集桥梁表面的图像信息。采集桥梁表面的图像信息时可采用各型拍摄机器(例如桥梁检测机器人),按照桥梁检测作业具体要求,采集获取桥梁各部位表面裂缝的图像信息。采集时,将图像拍摄设备正对桥梁被观测表面,使每次拍摄保持成像正交被拍摄面,并每次记录拍摄距离,连续拍摄成像收集所有拍摄图像。
[0071]
步骤s2、对采集的图像信息中含有裂缝的图像进行前处理得到裂缝上边缘、骨架和下边缘三条单像素宽度曲线以及曲线上每个像素点的三维坐标;所述前处理包括以下子步骤:
[0072]
子步骤s21、尺寸标定,计算每个像素点的单边尺寸和平面坐标。像素单边尺寸可按以下公式进行计算:
[0073][0074]
式中:η表示像素单边尺寸,单位为mm;b表示正交拍摄距离,单位为mm;f表示镜头焦距,单位为mm;sc表示成像器件尺寸,单位为mm2;ri表示摄像头的照片分辨率。根据像素单边尺寸可计算得到每个像素中心点平面坐标。
[0075]
子步骤s22、裂缝关键信息提取,通过图像处理得到裂缝上边缘(s)、骨架(g)和下边缘(t)三条单像素宽度曲线;通过图像处理提取出单像素宽度曲线为现有技术,在此不作赘述。如图2和图3所示,这三条曲线可以真实反映裂缝的宽度、长度和走向。
[0076]
子步骤s23、按走向排序,分别按走向计算裂缝上边缘、骨架和下边缘三条单像素宽度曲线上每个像素点的排列序号。按走向排序时,用3
×
3的矩形核分别遍历裂缝上边缘、骨架和下边缘三条单像素宽度曲线上所有的点,先判断首尾再按走向逐点依次排序。裂缝上边缘、骨架和下边缘三条单像素宽度曲线进行单独排序,假设裂缝上边缘的单像素宽度曲线上像素点数量为l,裂缝骨架的单像素宽度曲线上像素点数量为n,裂缝下边缘的单像素宽度曲线上像素点数量为m;则裂缝上边缘的像素点按照走向顺序从1到l依次分配排列序号,裂缝骨架的像素点按照走向顺序从1到n依次分配排列序号,裂缝下边缘的像素点按照走向顺序从1到m依次分配排列序号。所述三维坐标包括平面坐标和排列序号。
[0077]
步骤s3、采用三点插值法拟合骨架曲线函数,求出中间点的法线方程,并计算裂缝骨架曲线法线方向裂缝宽度方差。本步骤为现有技术,例如:本步骤具体可包括以下子步骤:
[0078]
子步骤s31、采用三点插值法拟合裂缝骨架曲线函数,求出所选的三个点中,中间点处的法线方程。
[0079]
子步骤s32、分别在裂缝上边缘曲线和裂缝下边缘曲线与法线交点两侧的特定范围内求直线方程代替该处边缘曲线;并分别求解出该处裂缝上边缘和裂缝下边缘直线方程与法线方程的交点坐标。
[0080]
子步骤s33、计算两个交点之间的距离作为骨架曲线在该像素点处法线方向的裂缝宽度dn。
[0081]
子步骤s34、重复子步骤s31~子步骤s33,逐个计算出裂缝骨架曲线上第二个像素点至倒数第二个像素点之间各像素点对应的法线方向裂缝宽度dn。
[0082]
子步骤s35、计算dn的平均值可按以下公式计算:
[0083][0084]
子步骤s36、计算法线方向裂缝宽度的方差可按以下公式计算:
[0085][0086]
其中,2≤n≤n-1,n为裂缝骨架的单像素宽度曲线上像素点的最大排列序号。
[0087]
步骤s4、采用三点插值法拟合裂缝上边缘曲线函数,逐个计算出裂缝上边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值,计算上边缘曲线二阶导数值的方差。具体可包括以下子步骤:
[0088]
子步骤s41、采用三点插值法拟合裂缝上边缘曲线函数,并计算中间点处二阶导数值。具体方法如下:
[0089]
取裂缝上边缘曲线三个连续像素点,假设上述三个连续像素点的三维坐标依次为s
l-1
(x
l-1
,y
l-1
,l-1)、s
l
(x
l
,y
l
,l)、s
l 1
(x
l 1
,y
l 1
,l 1);其中,2≤l≤l-1。
[0090]
当x
l-1
、x
l
、x
l 1
均不相等时,通过三点插值法拟合得到的上边曲线函数为y
sl
=ax2 bx c,s
l
(x
l
,y
l
,l)点处的二阶导数为:
[0091]ysl”=2a。
[0092]
当x
l-1
、x
l
、x
l 1
中任意两个的值相等,且与另一个的值不相等时,即满足当x
l-1
=x
l
或x
l
=x
l 1
或x
l-1
=x
l 1
,且不满足x
l-1
=x
l
=x
l 1
时,设在yox坐标系下通过三点插值法拟合得到的上边缘曲线函数为求其反函数得到在xoy坐标系下上边缘曲线函数为s
l
(x
l
,y
l
,l)点处的二阶导数可分以下四种情况进行求解:
[0093]
(1)若a》0且时,s
l
(x
l
,y
l
,l)点处的一阶导函数为:则s
l
(x
l
,y
l
,l)点处的二阶导函数为:
[0094]
(2)若a》0且时,s
l
(x
l
,y
l
,l)点处的一阶导函数为:则s
l
(x
l
,y
l
,l)点处的二阶导函数为:
[0095]
(3)若a《0且时,s
l
(x
l
,y
l
,l)点处的一阶导函数为:则s
l
(x
l
,y
l
,l)点处的二阶导函数为:
[0096]
(4)若a《0且时,s
l
(x
l
,y
l
,l)点处的一阶导函数为:则s
l
(x
l
,y
l
,l)点处的二阶导函数为:
[0097]
当x
l-1
=x
l
=x
l 1
时,上边缘曲线函数为直线,s
l
(x
l
,y
l
,l)点处的二阶导数为:
[0098]ysl”=0。
[0099]
子步骤s42、重复子步骤s41,逐个计算出裂缝上边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值y
sl”。
[0100]
子步骤s43、计算上边缘曲线各像素点对应二阶导数值y
sl”的平均值计算公式如下:
[0101][0102]
子步骤s44、根据上边缘曲线各像素点对应的二阶导数值及上边缘曲线各像素点二阶导数的平均值计算上边缘曲线二阶导数值的方差计算公式如下:
[0103][0104]
其中2≤l≤l-1。
[0105]
步骤s5、采用三点插值法拟合裂缝下边缘曲线函数,逐个计算出裂缝下边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值,计算下边缘曲线二阶导数值的方差。具体可包括以下子步骤:
[0106]
子步骤s51、采用三点插值法拟合裂缝下边缘曲线函数,并计算中间点处二阶导数值。具体方法如下:
[0107]
取裂缝下边缘曲线三个连续像素点,假设上述三个连续像素点的三维坐标依次为t
m-1
(x
m-1
,y
m-1
,m-1)、tm(xm,ym,m)、t
m 1
(x
m 1
,y
m 1
,m 1);其中,2≤m≤m-1;m为下边缘曲线像素点的最大排列序号。
[0108]
当x
m-1
、xm、x
m 1
均不相等时,通过三点插值法拟合得到的下边曲线函数为y
tm
=ax2 bx c,tm(xm,ym,m)点处的二阶导数为:
[0109]ytm”=2a。
[0110]
当x
m-1
、xm、x
m 1
中任意两个的值相等,且与另一个的值不相等时,即满足x
m-1
=xm或xm=x
m 1
或x
m-1
=x
m 1
,且不满足x
m-1
=xm=x
m 1
时,设在yox坐标系下通过三点插值法拟合得到的下边缘曲线函数为求其反函数得到在xoy坐标系下下边缘曲线函数为tm(xm,ym,m)点处的二阶导数可分以下四种情况进行求解:
[0111]
(1)若a》0且时,tm(xm,ym,m)点处的一阶导函数为:则tm(xm,ym,m)点处的二阶导函数为:
[0112]
(2)若a》0且时,tm(xm,ym,m)点处的一阶导函数为:则tm(xm,ym,m)点处的二阶导函数为:
[0113]
(3)若a《0且时,tm(xm,ym,m)点处的一阶导函数为:则tm(xm,ym,m)点处的二阶导函数为:
[0114]
(4)若a《0且时,tm(xm,ym,m)点处的一阶导函数为:则tm(xm,ym,m)点处的二阶导函数为:
[0115]
当x
m-1
=xm=x
m 1
时,下边曲线函数为直线,tm(xm,ym,m)点处的二阶导数为:
[0116]ytm”=0;
[0117]
子步骤s52、重复子步骤s51,逐个计算出裂缝下边缘曲线上第二个像素点至倒数第二个像素点之间各像素点对应的二阶导数值y
tm”。
[0118]
子步骤s53、计算下边缘曲线各像素点对应二阶导数值y
tm”的平均值计算公式如下:
[0119][0120]
子步骤s54、计算下边缘曲线二阶导数值的方差计算公式如下:
[0121][0122]
其中2≤m≤m-1。
[0123]
步骤s6、分别将法线方向裂缝宽度方差、上边缘曲线二阶导数值方差和下边缘曲线二阶导数值方差乘以相应权重系数后相加构造真伪判别系数,通过设置真伪判别系数阈值识别桥梁表面裂缝真伪。具体可包括以下子步骤:
[0124]
子步骤s61、设置法线方向裂缝宽度方差、上边缘曲线二阶导数值方差和下边缘曲线二阶导数值方差相应的权重系数pd、ps和p
t
,其中pd ps p
t
=1。
[0125]
子步骤s62、构造真伪判别系数φ;
[0126][0127]
子步骤s63、设置真伪判别系数阈值φ0,当φ≥φ0时,判定该曲线为真裂缝,当φ《φ0时,判定该曲线为假裂缝。
[0128]
pd、ps、p
t
和φ0都可通过大量试验统计分析不断优化调整,设置更为科学合理的权重系数和真伪判别系数阈值,最大程度的提高裂缝真伪识别准确率。
[0129]
本发明紧紧围绕裂缝上、下边缘曲线凹凸变化和法线方向裂缝宽度变化的离散性这三个最能判别裂缝真伪特征值,以这三个特征值为基础构造真伪判别系数,全面考虑了判定裂缝真伪的影响因素。采用三点插值函数拟合出裂缝上、下边缘曲线函数,计算裂缝上、下边缘曲线上各像素点(头尾两点除外)的二阶导数,对裂缝上、下边缘曲线变化的凹凸性进行量化处理。引入方差概念,通过计算裂缝上、下边缘曲线函数二阶导数和法线方向裂缝宽度的方差值来反映这三个特征值的离散程度。根据这三个特征值对判别裂缝真伪的贡献度不同,引入不同的权重系数更科学的构造真伪判别系数。该算法方便实现程序化,计算效率和识别准确率高,为桥梁表面混凝土裂缝检测定量评价提供了有效保障,有利于工程结构安全性和服役寿命的评估。
[0130]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。