1.本技术涉及空间可展开结构,特别涉及一种空间双稳态薄壁伸展杆弯曲刚度测试装置。
背景技术:
2.受限于发射体积和重量等要求,航天领域的空间结构所使用的支撑臂通常需满足轻质、高刚度和高可靠性等要求。空间双稳态薄壁伸展杆是一类具有薄壁柱壳结构特征,同时具有双稳态特性的重要的空间可展开结构支撑元件,其可以通过储存的弹性应变能或者是由机械传递驱动等方式在两个结构稳态间变形,实现空间结构的收拢卷曲或展开功能。空间双稳态薄壁伸展杆结构具有成型工艺简单、收纳效率高、收纳装置简单、展开过程可靠等优势,在空间可展开结构及其它工程领域具有广泛的应用前景。典型的空间双稳态薄壁伸展杆按照伸展杆截面形状的不同可以分为带状卷尺弹簧支撑杆(storable tubular extendible member,stem)、双层带状卷尺弹簧支撑杆(bi-stem)、可缠绕管式支撑杆(collapsible tubular masts,ctm)以及人字形支撑杆(triangular rollable and collapsible,trac)等。由于这类结构长细比大,在空间中抗弯曲能力较弱,地面测试中这类结构的弯曲刚度性能对空间可展开结构的设计和优化至关重要。目前,一些论文研究已经涉及到空间双稳态薄壁伸展杆弯曲刚度测试装置的设计。例如,杨留义等人设计的弯曲刚度测试装置是在空间双稳态薄壁伸展杆的自由端安装刚性端盖,固定端采用卡箍固定到光学平台上。测试时,固定端不动,自由端采用标准重物加载至伸展杆横截面形心处,通过坐标纸来记录自由端形心位置的位移,当杆的固定端出现小的局部屈曲时,测试停止。最终得到一条横轴为自由端的位移,纵轴为标准重物重量的曲线,通过计算可得到空间双稳态薄壁伸展杆的弯曲刚度(杨留义.织物复合材料双稳态柱壳卷展变形行为研究[d].哈尔滨工业大学,哈尔滨,2018.)。福永桃子等人设计的弯曲刚度测试装置是将测力计固定在框架上,利用测力计的顶端接触到伸展杆横截面的中心来施加载荷,伸展杆的位移通过固定在框架上的激光测距仪来获得。同样也会得到一条横轴为施加载荷端的位移,纵轴为测力计的读数的曲线,通过计算可得到空间双稳态薄壁伸展杆的弯曲刚度(momoko fukunaga,yasuyuki miyazaki.structural characteristics of self-extensible boom[c].aiaa spacecraft structures conference,kissimmee,florida,2018.)。
[0003]
需要指出的是,上述应用于双稳态薄壁空间伸展杆弯曲刚度的测试装置多采用重物加载等方式,存在加载控制精度低的问题;位移测量多采用激光测距仪或者数字图像相关的方法,存在位移测量误差大的问题,部分测试装置没有考虑载荷加载端夹具的影响。此外,上述这些装置存在通用性差,用于不同几何尺寸试样时改动较大等不足。
技术实现要素:
[0004]
本发明的目的在于提供一种空间双稳态薄壁伸展杆弯曲刚度测试装置,旨在提出一种面向空间可展开结构应用的,针对双稳态薄壁伸展杆弯曲刚度进行地面测试的装置。
该装置具有加载控制精度高、位移测量误差小且测量长度可以调节等优点。
[0005]
为实现上述目的,本发明提供如下技术方案。
[0006]
本技术实施例公开了一种空间双稳态薄壁伸展杆弯曲刚度测试装置,包括第一导轨,所述第一导轨上依次设置有固定安装的激光位移传感器以及滑动安装的第一滑块,所述第一滑块顶部固定有载荷加载框,所述第一滑块背离所述激光位移传感器的一端设置有驱动块,所述驱动块与所述载荷加载框之间连接有拉压传感器,所述载荷加载框一侧设置有固定端夹具座,所述载荷加载框与所述固定端夹具座之间固定待测伸展杆,所述拉压传感器监测所述驱动块带动所述载荷加载框的施力数据,所述激光位移传感器监测所述载荷加载框的位移数据。
[0007]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述固定端夹具座底部固定于第二滑块,所述第二滑块滑动安装于第二导轨,所述第一导轨延伸方向垂直于所述第二导轨延伸方向。
[0008]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述第二滑块为带锁紧功能的滑块。
[0009]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述载荷加载框以及所述固定端夹具座分别包括贴合夹持所述待测伸展杆的两夹块,所述夹块通过螺钉固定。
[0010]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述驱动块底部固定于第三滑块,所述第三滑块滑动安装于所述第一导轨,所述驱动块背离所述载荷加载框的一端设置有驱动电机,所述驱动电机驱动所述驱动块沿所述第一导轨移动。
[0011]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述驱动电机底部固定安装于第四滑块,所述第四滑块滑动安装于所述第一导轨,所述驱动电机与所述驱动块之间连接有丝杠,所述丝杠中部安装于滚珠丝杠专用轴承。
[0012]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述滚珠丝杠专用轴承相对设置有2个,共同安装于螺母座,所述螺母座底部固定安装于第五滑块,所述第五滑块为滑动安装于所述第一导轨的带锁紧功能的滑块。
[0013]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述丝杠与所述驱动电机之间依次设置有弹性联轴器以及行星齿轮减速器。
[0014]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述第一导轨设置于水平平台上,所述水平平台上还设置有激光位移传感器专用数显表以及拉压传感器专用智能数显表。
[0015]
优选的,在上述的空间双稳态薄壁伸展杆弯曲刚度测试装置中,所述水平平台上还设置有步进电机控制器、步进电机驱动器、24v直流电源。
[0016]
与现有技术相比,本发明技术方案的优势在于采用了导轨和滑块连接的设计,克服了现有的空间双稳态薄壁空间伸展杆弯曲刚度测试装置测试试件长度不能调节的缺陷,取得了空间双稳态薄壁伸展杆弯曲刚度测试装置的测试试件长度范围可以调节的效果;正是采用了步进电机和加载框加载的部件的设计,克服了现有的空间双稳态薄壁空间伸展杆弯曲刚度测试装置采用重力加载等方式时,存在加载控制精度低和存在重力影响的缺陷的缺陷,取得了加载控制精度高的效果;正是采用了位移值利用激光位移传感器直接从移动
端测量的部件的设计,克服了现有的空间双稳态薄壁空间伸展杆弯曲刚度测试装置采用数字图像进行测试的相关方法,存在位移测试误差大的缺陷,取得了空间双稳态薄壁伸展杆弯曲刚度测试装置位移测试精度得以提高的效果;正是采用了模块化的部件设计,克服了现有的空间双稳态薄壁空间伸展杆弯曲刚度测试装置通用性差,用于不同几何尺寸试样时改动较大的缺陷,取得了针对不同截面形状的空间双稳态薄壁伸展杆可实现夹具快速更换,适用范围广的效果。
附图说明
[0017]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0018]
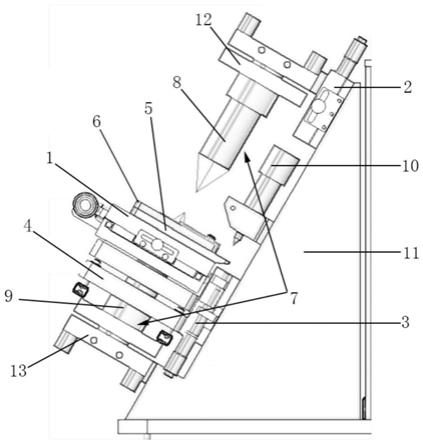
图1所示为本发明具体实施例中空间双稳态薄壁伸展杆弯曲刚度测试装置的立体图;
[0019]
图2所示为图1中右上角部分放大图。
具体实施方式
[0020]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行详细的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0021]
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0022]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0023]
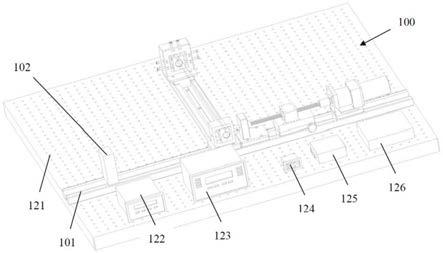
结合图1-2所示,空间双稳态薄壁伸展杆弯曲刚度测试装置100,包括第一导轨101,第一导轨101上依次设置有固定安装的激光位移传感器102以及滑动安装的第一滑块103,第一滑块103顶部固定有载荷加载框104,第一滑块103背离激光位移传感器102的一端设置有驱动块105,驱动块105与载荷加载框104之间连接有拉压传感器106,载荷加载框104一侧设置有固定端夹具座107,载荷加载框104与固定端夹具座107之间固定待测伸展杆200,拉压传感器106监测驱动块105带动载荷加载框104的施力数据,激光位移传感器102监测载荷加载框104的位移数据。
[0024]
该实施例中,驱动块经拉压传感器拉或推载荷加载框,载荷加载框与固定端夹具
座固定住待测的伸展杆,得到位移与载荷的曲线图。
[0025]
进一步地,固定端夹具座107底部固定于第二滑块108,第二滑块108滑动安装于第二导轨109,第一导轨101延伸方向垂直于第二导轨109延伸方向。第二滑块108为带锁紧功能的滑块。
[0026]
该实施例中,可以针对待测伸展杆的长度来调节固定端夹具座的位置,调节后锁紧第二滑块即可。
[0027]
进一步地,载荷加载框104以及固定端夹具座107分别包括贴合夹持待测伸展杆200的两夹块110,夹块110通过螺钉111固定。
[0028]
该实施例中,通过更换不同贴合的夹块就可以适应不同形状的待测伸展杆。
[0029]
进一步地,驱动块105底部固定于第三滑块112,第三滑块112滑动安装于第一导轨101,驱动块105背离载荷加载框104的一端设置有驱动电机113,驱动电机113驱动驱动块105沿第一导轨101移动。
[0030]
该实施例中,通过驱动电机驱动驱动块的移动,驱动电机优选步进电机,精度高,调节方便。
[0031]
进一步地,驱动电机113底部固定安装于第四滑块114,第四滑块114滑动安装于第一导轨101,驱动电机113与驱动块105之间连接有丝杠115,丝杠115中部安装于滚珠丝杠专用轴承116。
[0032]
该实施例中,滚珠丝杠专用轴承不动,将电机输出的丝杠的转动变为直线运动,驱动电机和驱动块分别通过底部的滑块实现移动,精度高,丝杠与驱动块的连接处需要设置轴承来保证连接。
[0033]
进一步地,滚珠丝杠专用轴承116相对设置有2个,共同安装于螺母座117,螺母座117底部固定安装于第五滑块118,第五滑块118为滑动安装于第一导轨101的带锁紧功能的滑块。
[0034]
该实施例中,可以根据不同丝杠的长度来调节螺母座的位置,调节后锁紧第五滑块即可。
[0035]
进一步地,丝杠115与驱动电机113之间依次设置有弹性联轴器119以及行星齿轮减速器120。
[0036]
该实施例中,提高了精度。
[0037]
进一步地,第一导轨101设置于水平平台121上,水平平台121上还设置有激光位移传感器专用数显表122以及拉压传感器专用智能数显表123。
[0038]
该实施例中,实时读出数据。
[0039]
进一步地,水平平台121上还设置有步进电机控制器124、步进电机驱动器125、24v直流电源126。
[0040]
该实施例中,实现控制驱动电机的输出。
[0041]
空间双稳态薄壁伸展杆弯曲刚度测试装置具体的工作流程为:
[0042]
step1:将所有模块安装到位,根据待测伸展杆试件的长度,将带锁紧功能第二滑块调节至第二导轨上合适的位置,固定;
[0043]
step2:将要待测伸展杆贴合在夹块,拧紧螺钉固定;
[0044]
step3:将所有传感器与专用智能数显表连接到位,将步进电机(驱动电机113)、步
进电机控制器、步进电机驱动器和24v直流电源连接到位;
[0045]
step4:通电,调节步进电机至所需要的载荷加载速度,对专用智能数显表分别进行归零操作;
[0046]
step5:按下步进电机控制器上的按钮,步进电机开始旋转,开始加载,载荷值从拉压传感器专用智能数显表读出,位移值从激光位移传感器专用智能数显表读出,记录下数值,重复操作,得到一组关于空间双稳态薄壁伸展杆位移值和载荷值的数据,绘制出位移值和载荷值的曲线,进而得到空间双稳态薄壁伸展杆的弯曲刚度。
[0047]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0048]
以上所述仅是本技术的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。