1.本技术涉及物联网设备的智能配置的领域,且更为具体地,涉及一种基于路由器的物联网设备的配置方法及其系统。
背景技术:
2.伴随着物联网的大潮,无数的物联网设备被安装上wifi模块,接入到互联网上,比如空调、冰箱、洗衣机、热水器、空气净化器、烤箱、电饭煲、照明设备、窗帘等等。wifi最大的优势是无需依赖手机或者其他中间设备,通过wifi路由器就能够连接到互联网上,直接与云服务器连接或者进行远程控制。并且,目前的wifi模块功耗和价格已经下降得很多,很容易被嵌入到各种物联网设备中,无需过多的担心成本和功耗。
3.目前,在智能家居环境中,各个智能设备在工作协同上存在着关联,例如,当智能门锁检测到用户输入离家信号时,如果用户忘记关灯,则可以通过路由器来智能地关闭照明设备;而当用户输入开锁信号时,期待走廊的灯能够亮起。并且,由于大多数时间用户的生活是规律的,例如,用户在用餐时,客厅的灯和厨房的灯通常会开着,而卧室的灯通常是关着的。
4.因此,为了对当前的各个物联网设备的工作状态进行智能控制,期望一种基于路由器的物联网设备的配置方案。
技术实现要素:
5.为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种基于路由器的物联网设备的配置方法及其系统,其采用基于深度学习技术的卷积神经网络模型来挖掘出所述各个时间点的各个物联网设备的工作状态之间的隐藏关联关系,以对所述当前的各个物联网设备的工作状态进行智能控制,并在此之前,本技术还将所述一个或多个时间连续层结构的局部参数与所述第一卷积神经网络的全局参数进行交替训练。通过这样的方式,可以使得各个物联网设备的工作控制效果更好,从而也就会使得智能家居的智能化更加贴合人们的生活。
6.根据本技术的一个方面,提供了一种基于路由器的物联网设备的配置方法,其包括:
7.训练阶段,包括:
8.获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接;
9.将所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵;
10.对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵;
11.分别将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络和第二卷
积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图;
12.对所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征;
13.计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量;
14.基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构;
15.获取由各个所述物联网设备的在某一时间点的状态构成的状态向量;
16.将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;
17.将所述分类特征向量通过分类器以获得分类损失函数值;以及
18.基于所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练;
19.推断阶段,包括:
20.获取各个所述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图;
21.获得由各个所述物联网设备的当前状态构成的状态向量;
22.将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;以及
23.将所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果;以及
24.控制阶段,包括:
25.基于所述分类结果,对各个所述物联网的当前工作状态进行控制。
26.根据本技术的另一方面,提供了一种基于路由器的物联网设备的配置系统,其包括:
27.训练模块,包括:
28.训练数据获取单元,用于获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接;
29.状态输入矩阵构造单元,用于将所述训练数据获取单元获得的所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵;
30.时间输入矩阵生成单元,用于对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵;
31.卷积神经网络处理单元,用于分别将所述状态输入矩阵构造单元获得的所述状态输入矩阵和所述时间输入矩阵生成单元获得的所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特
征图和用于表示高维时间关联特征的时间特征图;
32.全局池化处理单元,用于对所述卷积神经网络处理单元获得的所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征;
33.交叉熵计算单元,用于计算所述全局池化处理单元获得的所述时间特征向量中各个位置的特征值与所述卷积神经网络处理单元获得的所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量;
34.连续层结构确定单元,用于基于所述交叉熵计算单元获得的所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构;
35.状态向量构造单元,用于获取由各个所述物联网设备的在某一时间点的状态构成的状态向量;
36.映射单元,用于将所述状态向量构造单元获得的所述状态向量映射到所述卷积神经网络处理单元获得的所述状态特征图所在的特征空间中以获得分类特征向量;
37.分类器处理单元,用于将所述映射单元获得的所述分类特征向量通过分类器以获得分类损失函数值;以及
38.训练单元,用于基于所述分类器处理单元获得的所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练;以及
39.推断模块,包括:
40.状态特征图生成单元,用于获取各个所述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图;
41.状态向量生成单元,用于获得由各个所述物联网设备的当前状态构成的状态向量;
42.分类特征向量生成单元,用于将所述状态向量生成单元获得的所述状态向量映射到所述状态特征图生成单元获得的所述状态特征图所在的特征空间中以获得分类特征向量;以及
43.分类单元,用于将所述分类特征向量生成单元获得的所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果;以及
44.控制模块,包括:
45.控制单元,用于基于所述分类单元获得的所述分类结果,对各个所述物联网的当前工作状态进行控制。
46.根据本技术提供的基于路由器的物联网设备的配置方法及其系统,其采用基于深度学习技术的卷积神经网络模型来挖掘出所述各个时间点的各个物联网设备的工作状态之间的隐藏关联关系,以对所述当前的各个物联网设备的工作状态进行智能控制,并在此之前,本技术还将所述一个或多个时间连续层结构的局部参数与所述第一卷积神经网络的全局参数进行交替训练。通过这样的方式,可以使得各个物联网设备的工作控制效果更好,从而也就会使得智能家居的智能化更加贴合人们的生活。
附图说明
47.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
48.图1为根据本技术实施例的基于路由器的物联网设备的配置方法的场景示意图。
49.图2为根据本技术实施例的基于路由器的物联网设备的配置方法中训练阶段的流程图。
50.图3为根据本技术实施例的基于路由器的物联网设备的配置方法中推断阶段和控制阶段的流程图。
51.图4为根据本技术实施例的基于路由器的物联网设备的配置方法中训练阶段的架构示意图。
52.图5为根据本技术实施例的基于路由器的物联网设备的配置方法中推断阶段的架构示意图。
53.图6为根据本技术实施例的基于路由器的物联网设备的配置系统的框图。
具体实施方式
54.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
55.场景概述
56.如前所述,目前,在智能家居环境中,各个智能设备在工作协同上存在着关联,例如,当智能门锁检测到用户输入离家信号时,如果用户忘记关灯,则可以通过路由器来智能地关闭照明设备;而当用户输入开锁信号时,期待走廊的灯能够亮起。并且,由于大多数时间用户的生活是规律的,例如,用户在用餐时,客厅的灯和厨房的灯通常会开着,而卧室的灯通常是关着的。因此,为了对当前的各个物联网设备的工作状态进行智能控制,期望一种基于路由器的物联网设备的配置方案。
57.相应地,在本技术的技术方案中,期望挖掘各个时间点的各个物联网设备的工作状态之间的隐藏的关联关系,从而能够对当前的各个物联网设备的工作状态进行智能控制。
58.基于此,本技术的申请人考虑到大多数用户的工作是以周为单位的,因此首先获得一周当中的一些标准参考时间点的各个物联网设备的工作状态,比如周一早上8:00,中午12:00,下午6:30,晚上8:30这种标准参考时间点,将每个时间点的各个物联网设备的工作状态排列在矩阵的一行中,然后将各个时间点的各个物联网设备的工作状态沿矩阵的列排列,从而得到物联网设备的状态输入矩阵。
59.同时,为了更精确地表达这些标准参考时间点的时间信息,同样对于每个标准参考时间点的时间信息进行独热编码,例如周一早上8:00可以编码为“0010000100”,再将多个独热编码沿矩阵的列排列,从而得到物联网设备的时间输入矩阵。
60.然后,分别将状态输入矩阵和时间输入矩阵输入第一卷积神经网络和第二卷积神
经网络,以获得分别表示高维状态关联特征的状态特征图,和表示高维时间关联特征的时间特征图。
61.之后,为了以通过第二卷积神经网络精确编码的时间特征图中的信息来对状态特征图中的相对模糊的时间信息进行修正,首先对时间特征图进行沿通道和特征矩阵行的全局池化,从而得到长度为矩阵的列数的时间特征向量,用于表示所编码获得的时间信息的全局特征。此外,由于在状态特征图中,对应于每个特征矩阵的列的是时间维度,即假设状态特征图为t*s*c,其中t为时间维度,计算时间特征向量与s*c的每个特征矩阵的交叉熵值,以便得到在时间维度上状态特征图的交叉熵向量。
62.这里,该交叉熵向量用于找到状态特征图中具有超过阈值的预定相似表示形式的多个连续特征矩阵,这可以反向推导出第一卷积神经网络当中的预定的由连续层表示的块结构,从而通过对于这些块结构进行单独训练,可以使得第一卷积神经网络提取出更符合精确的时间信息分布的高维特征分布。
63.也就是,基于交叉熵向量中的连续位置之间的差值,确定第一卷积神经网络中的一个或多个时间维度上的连续层结构,并在第一卷积神经网络的训练过程中,将所述一个或多个时间连续层结构的局部参数与所述第一卷积神经网络的全局参数进行交替训练,这里,如果存在多个时间连续层结构,则每个时间连续层结构的局部参数也在单独的迭代周期中进行训练。
64.这样,在完成训练之后,就可以按照如上所述的方法从各个物联网设备的工作状态的历史数据得到状态特征图,再以状态特征图乘以各个物联网设备的当前工作状态构成的状态向量,以得到当前各个物联网设备的工作状态的概率特征向量,以对各个物联网设备的当前工作状态进行控制。
65.基于此,本技术提出了一种基于路由器的物联网设备的配置方法,其包括:训练阶段、推断阶段和控制阶段。其中,训练阶段包括步骤:获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接;将所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵;对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵;分别将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图;对所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征;计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量;基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构;获取由各个所述物联网设备的在某一时间点的状态构成的状态向量;将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;将所述分类特征向量通过分类器以获得分类损失函数值;以及,基于所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练。其中,推断阶段包括步骤:获取各个所
述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图;获得由各个所述物联网设备的当前状态构成的状态向量;将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;以及,将所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果。其中,控制阶段包括步骤:基于所述分类结果,对各个所述物联网的当前工作状态进行控制。
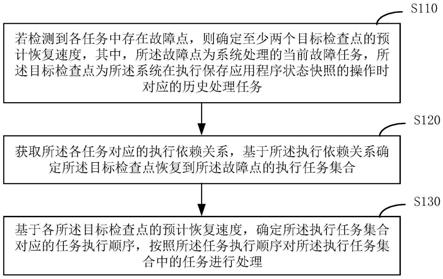
66.图1图示了根据本技术实施例的基于路由器的物联网设备的配置方法的场景示意图。如图1所示,在该应用场景的训练阶段中,首先,获取一周中各天的多个标准参考时间点的各个物联网设备(例如,如图1中所示意的t)的工作状态作为训练数据,其中,所述各个物联网设备包括但不局限于空调、冰箱、洗衣机、热水器、空气净化器、烤箱、电饭煲、照明设备、窗帘等,并且各个所述物联网设备基于路由器(例如,如图1中所示意的p)相互可通信地连接,同时,所述工作状态可以为开启或者关闭状态等。然后,将获得的所述训练数据和所述多个标准参考时间点中各个标准参考时间点输入至部署有基于路由器的物联网设备的配置算法的服务器(例如,如图1中所示意的s)中,其中,所述服务器能够基于路由器的物联网设备的配置算法以所述训练数据和所述多个标准参考时间点中各个标准参考时间点对基于路由器的物联网设备的配置的卷积神经网络进行训练。
67.在训练完成后,在推断阶段中,首先,获取各个所述物联网设备(例如,如图1中所示意的t)的工作状态的历史数据(例如,从云端存储器中获取)以及获得各个所述物联网设备的当前状态。然后,将所述工作状态的历史数据以及各个所述物联网设备的当前状态输入至部署有基于路由器的物联网设备的配置算法的服务器(例如,如图1中所示意的s)中,其中,所述服务器能够以基于路由器的物联网设备的配置算法对所述工作状态的历史数据以及各个所述物联网设备的当前状态进行处理,以生成各个所述物联网设备的当前工作状态的控制结果的分类结果。
68.进而,在推断完成后,在控制阶段中,再基于所述分类结果,对各个所述物联网的当前工作状态进行控制,其中,各个所述物联网设备基于路由器(例如,如图1中所示意的p)相互可通信地连接。
69.在介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术的各种非限制性实施例。
70.示例性方法
71.图2图示了根据本技术实施例的基于路由器的物联网设备的配置方法中训练阶段的流程图。如图2所示,根据本技术实施例的基于路由器的物联网设备的配置方法,包括:训练阶段,包括步骤:s110,获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接;s120,将所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵;s130,对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵;s140,分别将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图;s150,对所述时间特征
图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征;s160,计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量;s170,基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构;s180,获取由各个所述物联网设备的在某一时间点的状态构成的状态向量;s190,将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;s200,将所述分类特征向量通过分类器以获得分类损失函数值;以及,s210,基于所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练。
72.图3图示了根据本技术实施例的基于路由器的物联网设备的配置方法中推断阶段和控制阶段的流程图。如图3所示,根据本技术实施例的基于路由器的物联网设备的配置方法,还包括:推断阶段,包括步骤:s310,获取各个所述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图;s320,获得由各个所述物联网设备的当前状态构成的状态向量;s330,将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量;以及,s340,将所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果。如图3所示,根据本技术实施例的基于路由器的物联网设备的配置方法,还包括:控制阶段,包括步骤:s350,基于所述分类结果,对各个所述物联网的当前工作状态进行控制。
73.图4图示了根据本技术实施例的基于路由器的物联网设备的配置方法中训练阶段的架构示意图。如图4所示,在训练阶段中,在该网络架构中,首先,将获得的所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态(例如,如图4中所示意的in1)按照时间维度和物联网设备维度构造为二维的状态输入矩阵(例如,如图4中所示意的m1);接着,对所述多个标准参考时间点中各个标准参考时间点(例如,如图4中所示意的in2)进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵(例如,如图4中所示意的m2);然后,分别将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络(例如,如图4中所示意的cnn1)和第二卷积神经网络(例如,如图4中所示意的cnn2)以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图(例如,如图4中所示意的f1)和用于表示高维时间关联特征的时间特征图(例如,如图4中所示意的f2);接着,对所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量(例如,如图4中所示意的vf1);然后,计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量(例如,如图4中所示意的v1);接着,基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构(例如,如图4中所示意的cl);s180,获取由各个所述物联网设备的在某一时间点的状态(例如,如图4中所示意的in3)构成的状态向量(例如,如图4中所示意的v2);然后,将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量(例如,如图4中所示意的vf2);接着,将所述分类特征向量通过分类器(例如,如图4中所示意的圈s)以获得分类损失函数值;以及,最后,基于所述分类损失函数值,对所述一个或多个在时间维度上的
连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练。
74.图5图示了根据本技术实施例的基于路由器的物联网设备的配置方法中推断阶段的架构示意图。如图5所示,在推断阶段中,在该网络结构中,首先,将获取的各个所述物联网设备的工作状态(例如,如图5中所示意的p)的历史数据通过经训练阶段训练完成的所述第一卷积神经网络(例如,如图5中所示意的cnn)以获得状态特征图(例如,如图5中所示意的f);接着,将获得的由各个所述物联网设备的当前状态(例如,如图5中所示意的q)构成状态向量(例如,如图5中所示意的v);然后,将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量(例如,如图5中所示意的vf);以及,最后,将所述分类特征向量通过分类器(例如,如图5中所示意的圈s)以获得分类结果。进而,在控制阶段中,再基于所述分类结果,对各个所述物联网的当前工作状态进行控制。
75.更具体地,在训练阶段中,在步骤s110和步骤s120中,获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接,并将所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵。如前所述,在本技术的技术方案中,期望能够挖掘出所述各个时间点的各个所述物联网设备的工作状态之间的隐藏的关联关系,从而能够对当前的各个所述物联网设备的工作状态进行智能控制。因此,首先就需要获取在该所述一系列时间点的各个所述物联网设备的工作状态作为训练数据,应可以理解,考虑到大多数用户的工作是以周为单位的,因此首先获得一周当中的一些标准参考时间点的各个所述物联网设备的工作状态,比如周一早上8:00,中午12:00,下午6:30,晚上8:30这种标准参考时间点;然后,再将每个时间点的各个所述物联网设备的工作状态排列在矩阵的一行中,然后将各个时间点的各个所述物联网设备的工作状态沿矩阵的列排列,从而得到所述物联网设备的状态输入矩阵。
76.具体地,在本技术实施例中,将所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵的过程,包括:首先,将每个所述标准参考时间点的各个所述物联网设备的工作状态排列在所述状态输入矩阵的一行中;然后,将各个所述标准参考时间点的各个所述物联网设备的工作状态沿所述状态输入矩阵的列排列以获得所述状态输入矩阵。相应地,在一个具体示例中,如果所述物联网设备的工作状态为开启,则设定为1;如果所述物联网设备的工作状态为关闭,则设定为0。
77.更具体地,在训练阶段中,在步骤s130和步骤s140中,对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵,并分别将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图。应可以理解,为了更精确地表达这些所述标准参考时间点的时间信息,因此,在本技术的技术方案中,同样对于每个所述标准参考时间点的时间信息进行独热编码,例如周一早上8:00可以编码为“0010000100”,再将多个所述独热编码沿矩阵的列排列,从而得到物联网设备的时间输入矩阵。也就是,首先,对所述多个标准参考时间点中各个标准参考时间点进行独热编码;然后,再通过第一卷积神经网络与第二卷积神经网络分别对所述状态输入矩阵和所述时间输
入矩阵进行处理,以提取出各个所述物联网设备之间的高维状态关联特征,从而得到状态特征图,并提取出各个所述物联网设备之间的高维时间关联特征,从而得到所述时间特征图。
78.具体地,在本技术实施例中,将所述状态输入矩阵和所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图的过程,包括:所述第一卷积神经网络的最后一层以sigmoid函数进行激活以使得所述状态特征图中各个位置的特征值在0到1的概括空间中,以便于后续的计算。
79.更具体地,在训练阶段中,在步骤s150和步骤s160中,对所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征,并计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量。应可以理解,为了以通过所述第二卷积神经网络精确编码的所述时间特征图中的信息来对所述状态特征图中的相对模糊的时间信息进行修正,在本技术的技术方案中,首先,对所述时间特征图进行沿通道和特征矩阵行的全局池化处理,从而得到长度为矩阵的列数的时间特征向量,这里,所述时间特征向量用于表示所编码获得的时间信息的全局特征。然后,计算所述时间特征向量中各个位置的特征值与所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量。应可以理解,由于在所述状态特征图中,对应于每个所述特征矩阵的列的是时间维度,也就是,假设所述状态特征图为t*s*c,其中t为时间维度,并且由于所述交叉熵主要用于度量两个概率分布间的差异性信息,因此计算所述时间特征向量与s*c的每个所述特征矩阵的交叉熵值,以便得到在时间维度上所述状态特征图的交叉熵向量。
80.具体地,在本技术实施例中,对所述时间特征图进行沿通道和特征矩阵行的全局池化处理以获得长度为所述特征矩阵的列数的时间特征向量的过程,包括:首先,对所述时间特征图进行沿通道的全局最大值池化处理,以获得通道特征矩阵;然后,对所述通道特征矩阵进行沿特征矩阵行的全局平均值池化处理,以获得所述时间特征向量。通过全局池化处理,能够减少参数数量,这样不仅可以减少计算量,还可以减少过拟合。
81.更具体地,在训练阶段中,在步骤s170中,基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构。应可以理解,由于所述交叉熵向量用于找到所述状态特征图中具有超过阈值的预定相似表示形式的多个连续特征矩阵,这可以反向推导出所述第一卷积神经网络当中的预定的由连续层表示的块结构,从而通过对于这些所述块结构进行单独训练,可以使得所述第一卷积神经网络提取出更符合精确的时间信息分布的高维特征分布。也就是,在本技术的技术方案中,首先基于所述交叉熵向量中的连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个时间维度上的连续层结构。
82.具体地,在本技术实施例中,基于所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构的过程,包括:响应于所述差值小于预定阈值,确定所述第一卷积神经网络中的对应区域为一个在时间维度上的连续层结构。
83.更具体地,在训练阶段中,在步骤s180和步骤s190中,获取由各个所述物联网设备的在某一时间点的状态构成的状态向量,并将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量。也就是,首先,在某一时间点上获取各个所述物联网设备的工作状态;然后,再将获得的所述工作状态构造为所述状态向量;最后,将所述状态向量映射到所述状态特征图所在的特征空间中,以得到用于分类的分类特征向量。具体地,在本技术实施例中,可以将所述状态特征向量乘以所述状态特征图,从而得到所述分类特征向量。
84.更具体地,在训练阶段中,在步骤s200和步骤s210中,将所述分类特征向量通过分类器以获得分类损失函数值,并基于所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练。也就是,在所述第一卷积神经网络的训练过程中,将所述一个或多个时间连续层结构的局部参数与所述第一卷积神经网络的全局参数进行交替训练,值得一提的的是,这里,如果存在多个时间连续层结构,则每个所述时间连续层结构的局部参数也在单独的迭代周期中进行训练。
85.具体地,在本技术实施例中,将所述分类特征向量通过分类器以获得分类损失函数值的过程,包括:首先,将所述分类特征向量输入类softmax函数以获得所述状态控制向量。在一个具体示例中,可以先计算所述分类特征向量中各个位置的类softmax函数值以获得状态控制概率向量;接着再基于所述状态控制概率向量中各个位置的特征值与预定阈值之间的比较,生成所述状态控制向量。然后,计算所述状态控制向量与由各个物联网设备的工作状态的真实值组成的真实状态向量之间的交叉熵损失函数值作为所述分类损失函数值。
86.特别地,在一个具体示例中,基于所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练的过程,包括:在每一轮迭代中,先基于所述分类损失函数值更新所述一个或多个在时间维度上的连续层结构的局部参数,以及,后基于所述分类损失函数值更新所述第一卷积神经网络的全局参数。
87.在训练完成后,进入推断阶段。也就是在使用基于路由器的物联网设备的配置算法来训练卷积神经网络后,将训练后的卷积神经网络用于推断中。
88.更具体地,在推断阶段中,在步骤s310中,获取各个所述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图。也就是,首先,从云端获取各个所述物联网设备的工作状态的历史数据;然后,将得到的所述历史数据通过经训练阶段训练完成的所述第一卷积神经网络进行处理,以提取出各个所述物联网设备之间的高维状态关联特征,从而获得状态特征图。值得一提的是,这里,各个所述物联网设备基于路由器相互可通信地连接。
89.更具体地,在推断阶段中,在步骤s320和步骤s330中,获得由各个所述物联网设备的当前状态构成的状态向量,并将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量。也就是,同理,首先,获取各个所述物联网设备的当前状态,也就是实际的状态;然后,再把所述当前状态构造为状态向量;最后将所述状态向量映射到所述状态特征图所在的特征空间中以获得分类特征向量。在一个具体示例中,以所述状态特征图乘以所述状态向量,以得到当前各个所述物联网设备的工作状态的概率特征向量,也就是所
述分类特征向量。
90.更具体地,在推断阶段中,在步骤s340中,将所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果。具体地,在本技术实施例中,首先,计算所述分类特征向量中各个位置的类softmax函数值以获得状态控制向量。在一个具体示例中,以如下公式计算所述分类特征向量中各个位置的类softmax函数值,以获得状态控制向量;所述公式为:p=exp(-fi)/∑exp(-fi),其中,fi表示所述分类特征向量中各个位置的特征值。
91.然后,基于所述状态控制向量中各个位置的特征值与预定阈值之间的比较,以生成分类结果。具体地,当所述状态控制向量中某个位置的特征值大于所述预定阈值时,所述分类结果为该所述物联网设备的当前工作状态的控制结果为开启状态;当所述状态控制向量中某个位置的特征值小于所述预定阈值时,所述分类结果为该所述物联网设备的当前工作状态的控制结果为关闭状态。
92.更具体地,在控制阶段中,在步骤s350中,基于所述分类结果,对各个所述物联网的当前工作状态进行控制。具体地,在本技术实施例中,当所述分类结果为该所述物联网设备的当前工作状态的控制结果为开启状态时,相应于对该所述物联网设备的工作状态进行开启控制;相应地,当所述分类结果为该所述物联网设备的当前工作状态的控制结果为关闭状态时,相应于对该所述物联网设备的工作状态进行关闭控制。
93.综上,基于本技术实施例的基于路由器的物联网设备的配置方法被阐明,其采用基于深度学习技术的卷积神经网络模型来挖掘出所述各个时间点的各个物联网设备的工作状态之间的隐藏关联关系,以对所述当前的各个物联网设备的工作状态进行智能控制,并在此之前,本技术还将所述一个或多个时间连续层结构的局部参数与所述第一卷积神经网络的全局参数进行交替训练。通过这样的方式,可以使得各个物联网设备的工作控制效果更好,从而也就会使得智能家居的智能化更加贴合人们的生活。
94.示例性系统
95.图6图示了根据本技术实施例的基于路由器的物联网设备的配置系统的框图。如图6所示,根据本技术实施例的基于路由器的物联网设备的配置系统600,包括:训练模块610、推断模块620和控制模块630。
96.如图6所示,所述训练模块610,包括:训练数据获取单元6101,用于获取训练数据,所述训练数据为一周中的各天的多个标准参考时间的各个物联网设备的工作状态,其中,各个所述物联网设备基于路由器相互可通信地连接;状态输入矩阵构造单元6102,用于将所述训练数据获取单元6101获得的所述一周中的各天的多个标准参考时间的各个物联网设备的工作状态按照时间维度和物联网设备维度构造为二维的状态输入矩阵;时间输入矩阵生成单元6103,用于对所述多个标准参考时间点中各个标准参考时间点进行独热编码,并将所述多个标准参考时间点对应的多个独热编码排列为二维的时间输入矩阵;卷积神经网络处理单元6104,用于分别将所述状态输入矩阵构造单元6102获得的所述状态输入矩阵和所述时间输入矩阵生成单元6103获得的所述时间输入矩阵输入第一卷积神经网络和第二卷积神经网络以获得用于表示各个物联网设备之间的高维状态关联特征的状态特征图和用于表示高维时间关联特征的时间特征图;全局池化处理单元6105,用于对所述卷积神经网络处理单元6104获得的所述时间特征图进行沿通道和特征矩阵行的全局池化处理以
获得长度为所述特征矩阵的列数的时间特征向量,其中,所述时间特征向量用于表示编码获得的时间信息的全局特征;交叉熵计算单元6106,用于计算所述全局池化处理单元6105获得的所述时间特征向量中各个位置的特征值与所述卷积神经网络处理单元6104获得的所述状态特征图在时间维度上的各个特征矩阵之间的交叉熵数值以获得交叉熵向量;连续层结构确定单元6107,用于基于所述交叉熵计算单元6106获得的所述交叉熵向量中连续位置的特征值之间的差值,确定所述第一卷积神经网络中的一个或多个在时间维度上的连续层结构;状态向量构造单元6108,用于获取由各个所述物联网设备的在某一时间点的状态构成的状态向量;映射单元6109,用于将所述状态向量构造单元6108获得的所述状态向量映射到所述卷积神经网络处理单元6104获得的所述状态特征图所在的特征空间中以获得分类特征向量;分类器处理单元6110,用于将所述映射单元6109获得的所述分类特征向量通过分类器以获得分类损失函数值;以及,训练单元6111,用于基于所述分类器处理单元6110获得的所述分类损失函数值,对所述一个或多个在时间维度上的连续层结构的局部参数和所述第一卷积神经网络的全局参数进行训练。
97.如图6所示,所述推断模块620,包括:状态特征图生成单元6201,用于获取各个所述物联网设备的工作状态的历史数据并通过经训练阶段训练完成的所述第一卷积神经网络以获得状态特征图;状态向量生成单元6202,用于获得由各个所述物联网设备的当前状态构成的状态向量;分类特征向量生成单元6203,用于将所述状态向量生成单元6202获得的所述状态向量映射到所述状态特征图生成单元6201获得的所述状态特征图所在的特征空间中以获得分类特征向量;以及,分类单元6204,用于将所述分类特征向量生成单元6203获得的所述分类特征向量通过分类器以获得分类结果,其中,所述分类结果为各个所述物联网设备的当前工作状态的控制结果。
98.如图6所示,所述控制模块630,包括:控制单元6301,用于基于所述分类单元获得的所述分类结果,对各个所述物联网的当前工作状态进行控制。
99.这里,本领域技术人员可以理解,上述基于路由器的物联网设备的配置系统600中的各个单元和模块的具体功能和操作已经在上面参考图1到图5的基于路由器的物联网设备的配置方法的描述中得到了详细介绍,并因此,将省略其重复描述。
100.如上所述,根据本技术实施例的基于路由器的物联网设备的配置系统600可以实现在各种终端设备中,例如基于路由器的物联网设备的配置算法的服务器等。在一个示例中,根据本技术实施例的基于路由器的物联网设备的配置系统600可以作为一个软件模块和/或硬件模块而集成到终端设备中。例如,该基于路由器的物联网设备的配置系统600可以是该终端设备的操作装置中的一个软件模块,或者可以是针对于该终端设备所开发的一个应用程序;当然,该基于路由器的物联网设备的配置系统600同样可以是该终端设备的众多硬件模块之一。
101.替换地,在另一示例中,该基于路由器的物联网设备的配置系统600与该终端设备也可以是分立的设备,并且该基于路由器的物联网设备的配置系统600可以通过有线和/或无线网络连接到该终端设备,并且按照约定的数据格式来传输交互信息。
102.以上结合具体实施例描述了本技术的基本原理,但是,需要指出的是,在本技术中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本技术的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作
用,而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
103.本技术中涉及的器件、装置、设备、系统的方框图仅作为例示性的例子并且不意图要求或暗示必须按照方框图示出的方式进行连接、布置、配置。如本领域技术人员将认识到的,可以按任意方式连接、布置、配置这些器件、装置、设备、系统。诸如“包括”、“包含”、“具有”等等的词语是开放性词汇,指“包括但不限于”,且可与其互换使用。这里所使用的词汇“或”和“和”指词汇“和/或”,且可与其互换使用,除非上下文明确指示不是如此。这里所使用的词汇“诸如”指词组“诸如但不限于”,且可与其互换使用。
104.还需要指出的是,在本技术的装置、设备和方法中,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本技术的等效方案。
105.提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。