技术特征:
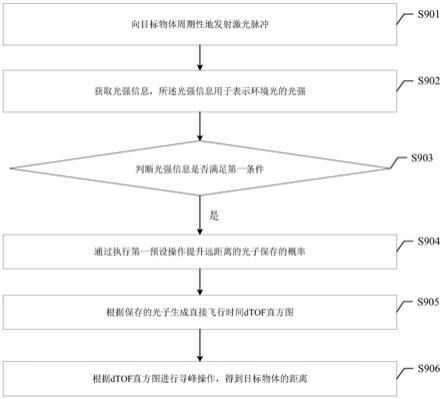
1.一种测距方法,其特征在于,包括:向目标物体周期性地发射激光脉冲;获取光强信息,所述光强信息用于表示环境光的光强;当所述光强信息满足第一条件时,通过执行第一预设操作提升远距离的光子保存的概率;其中,所述第一条件包括所述环境光的光强超过第一光强阈值;根据保存的光子生成直接飞行时间dtof直方图;根据所述dtof直方图进行寻峰操作,得到所述目标物体的距离。2.根据权利要求1所述的测距方法,其特征在于,所述第一光强阈值为分配给单个光电探测单元的内存空间中保存的光子数的限值;所述获取光强信息,具体包括:关闭激光发射器,对所述目标物体所在的场景的环境光进行探测,获得单个光电探测单元的实测环境光光子密度;根据所述实测环境光光子密度和脉冲周期获得脉冲周期内单个光电探测单元探测到的光子数的期望值和标准差;根据所述期望值、预设系数和所述标准差得到脉冲周期内单个光电探测单元探测到的光子数最大值作为所述光强信息。3.根据权利要求2所述的测距方法,其特征在于,还包括:当所述光强信息满足第二条件时,将光电探测单元后探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间,或者,将光电探测单元先探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间;所述第二条件包括所述环境光的光强未超过第二光强阈值;所述第二光强阈值小于或等于所述第一光强阈值。4.根据权利要求1-3任一项所述的测距方法,其特征在于,所述通过执行第一预设操作提升远距离的光子保存的概率,具体包括:将光电探测单元后探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间。5.根据权利要求1所述的测距方法,其特征在于,所述通过执行第一预设操作提升远距离的光子保存的概率,具体包括:获得光子保存的时延门限;所述时延门限用于对光子的保存提供延时,使得光电探测单元对应的内存空间连续保存飞行时间的两个光子的到达时刻之差大于该光电探测单元的死区时间;光子的到达时刻为光电探测单元探测到该光子的时刻;对于脉冲周期内光电探测单元连续探测到的光子,判断当前光子与前一成功保存飞行时间的光子的到达时刻之差是否大于所述时延门限,如果是,则将所述当前光子的飞行时间保存至该光电探测单元对应的内存空间。6.根据权利要求5所述的测距方法,其特征在于,所述获得光子保存的时延门限,具体包括:关闭激光发射器,对所述目标物体所在的场景的环境光进行探测,获得单个光电探测单元的实测环境光光子密度;根据所述实测环境光光子密度和脉冲周期获得脉冲周期内单个光电探测单元探测到的光子数的期望值和标准差;以及,根据所述实测环境光光子密度和单个光电探测单元的死区时间获得脉冲周期内单个光电探测单元探测的光子密度理论值;
根据所述期望值、预设系数和所述标准差得到脉冲周期内单个光电探测单元探测到的光子数最大值;根据所述脉冲周期、所述光子数最大值和所述光子密度理论值得到所述时延门限。7.根据权利要求6所述的测距方法,其特征在于,所述时延门限具体通过以下公式获得:其中,所述n
det
表示单个光电探测单元探测到的光子数最大值,所述t
p
表示脉冲周期,所述τ
delay
表示所述时延门限,所述λ表示脉冲周期内单个光电探测单元探测的光子密度理论值。8.根据权利要求1-7任一项所述的测距方法,其特征在于,所述光强信息为利用光电探测单元采集的数据获得的。9.根据权利要求1-8任一项所述的测距方法,其特征在于,光电探测单元工作在自由触发模式。10.根据权利要求1-4任一项所述的测距方法,其特征在于,在所述生成直接飞行时间dtof直方图之后,还包括:根据所述dtof直方图进行滤波,得到滤波后的dtof直方图;所述根据所述dtof直方图寻峰,得到所述目标物体的距离,具体包括:根据所述滤波后的dtof直方图寻峰,得到峰值对应的直接飞行时间;根据所述峰值对应的直接飞行时间和光速,获得所述目标物体的距离。11.一种电子设备,其特征在于,包括:激光发射器、控制器、光电传感器、时间数字转换器tdc和内存;所述光电传感器包括多个光电探测单元,每个光电探测单元在所述内存具有对应的内存空间;所述激光发射器、所述tdc及所述内存均与所述控制器连接;所述光电传感器连接所述tdc;所述控制器,用于控制激光发射器向目标物体周期性地发射激光脉冲;所述光电探测单元,用于探测光子;所述光子来自所述目标物体所在的场景;所述tdc,用于记录所述光电探测单元探测到的光子的飞行时间;对于光电探测单元,远距离的光子的飞行时间大于近距离的光子的飞行时间;所述控制器,还用于获取光强信息;当所述光强信息满足第一条件时,通过执行第一预设操作提升远距离的光子保存的概率;根据保存的光子生成直接飞行时间dtof直方图;根据所述dtof直方图进行寻峰操作,得到所述目标物体的距离;所述光强信息用于表示环境光的光强,所述第一条件包括所述环境光的光强超过第一光强阈值;所述内存,用于根据所述控制器的控制来保存光子的飞行时间。12.根据权利要求11所述的电子设备,其特征在于,所述第一光强阈值为分配给单个光电探测单元的内存空间中保存的光子数的限值;所述控制器,具体用于控制关闭所述激光发射器,通过所述光电传感器对所述目标物体所在的场景的环境光进行探测,获得单个光电探测单元的实测环境光光子密度;根据所述实测环境光光子密度和脉冲周期获得脉冲周期内单个光电探测单元探测到的光子数的期望值和标准差;根据所述期望值、预设系数和所述标准差得到脉冲周期内单个光电探测
单元探测到的光子数最大值作为所述光强信息。13.根据权利要求12所述的电子设备,其特征在于,所述控制器,还用于当所述光强信息满足第二条件时,将光电探测单元后探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间,或者,将光电探测单元先探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间;所述第二条件包括所述环境光的光强未超过第二光强阈值;所述第二光强阈值小于或等于所述第一光强阈值。14.根据权利要求11-13任一项所述的电子设备,其特征在于,所述控制器,具体用于控制所述内存将光电探测单元后探测到的若干个光子各自的飞行时间优先保存至该光电探测单元对应的内存空间。15.根据权利要求11所述的电子设备,其特征在于,所述控制器,具体用于获得光子保存的时延门限;对于脉冲周期内光电探测单元连续探测到的光子,判断当前光子与前一成功保存飞行时间的光子的到达时刻之差是否大于所述时延门限,如果是,则控制所述内存将所述当前光子的飞行时间保存至该光电探测单元对应的内存空间;所述时延门限用于对光子的保存提供延时,使得光电探测单元对应的内存空间连续保存飞行时间的两个光子的到达时刻之差大于该光电探测单元的死区时间;光子的到达时刻为光电探测单元探测到该光子的时刻。16.根据权利要求15所述的电子设备,其特征在于,所述控制器,具体用于控制关闭所述激光发射器,通过所述光电传感器对所述目标物体所在的场景的环境光进行探测,获得单个光电探测单元的实测环境光光子密度;根据所述实测环境光光子密度和脉冲周期获得脉冲周期内单个光电探测单元探测到的光子数的期望值和标准差;以及,根据所述实测环境光光子密度和单个光电探测单元的死区时间获得脉冲周期内单个光电探测单元探测的光子密度理论值;根据所述期望值、预设系数和所述标准差得到脉冲周期内单个光电探测单元探测到的光子数最大值;根据所述脉冲周期、所述光子数最大值和所述光子密度理论值得到所述时延门限。17.根据权利要求16所述的电子设备,其特征在于,所述时延门限具体通过以下公式获得:其中,所述n
det
表示单个光电探测单元探测到的光子数最大值,所述t
p
表示脉冲周期,所述τ
delay
表示所述时延门限,所述λ表示脉冲周期内单个光电探测单元探测的光子密度理论值。18.根据权利要求11-17任一项所述的电子设备,其特征在于,所述光电传感器的各个光电探测单元工作在自由触发模式。19.根据权利要求11-14任一项所述的电子设备,其特征在于,所述控制器,还用于根据所述dtof直方图进行滤波,得到滤波后的dtof直方图;所述控制器,具体用于根据所述滤波后的dtof直方图寻峰,得到峰值对应的直接飞行时间;根据所述峰值对应的直接飞行时间和光速,获得所述目标物体的距离。
技术总结
本申请公开了一种测距方法及电子设备。依据环境光的光强对光子的保存进行控制,在环境光光强较强时通过第一预设操作提升远距离光子保存的概率,打破优先保存近距离光子的固有实现方式,避免了强环境光条件下远距离光子无法成功保存的问题。本申请在测距时,抵抗强光环境干扰,提升对远距离目标返回的光子的保存概率,进而生成时间维度上更加均衡化的dTOF直方图,提升对远距离目标的测距性能。并且测距方法在具体实现时,曝光时间短、曝光次数少,不会浪费激光能量,且帧率高,测距时间短。此外,不需要增加额外的硬件成本。不需要增加额外的硬件成本。不需要增加额外的硬件成本。
技术研发人员:余恺 张朝龙 俞锋 曾佳 蒋珂玮
受保护的技术使用者:华为技术有限公司
技术研发日:2020.11.19
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。