1.本发明涉及煤矿井巡检技术领域,具体的涉及一种应用于矿井的挂轨式巡检机器人系统。
背景技术:
2.目前,在煤矿领域进行开采作业时,为保证开采工作的顺利进行,保障作业人员的生命安全,常需要进行现场巡检工作,巡检机器人作为巡检工的替代,能实时采集、存储、传输现场的图像,声音、温度和烟雾等数据,减轻劳动强度、降低劳动风险,巡检机器人的轨道需要事先安装在巡检路线上,由于巡检机器人上设置有大量的检测设备,巡检机器人在行走的过程中产生的震动会对检测设备造成较大的干扰,甚至造成损害的现象。但是现有的矿井式巡检机器人往往都是轮式或履带式贴地行走的巡检机器人,而煤矿地面复制,高度不平,斜面陡峭,贴地行走的巡检机器人则会具有很大的局限性,因此设计一种应用于矿井的挂轨式巡检机器人系统则显得尤为重要。
技术实现要素:
3.本发明提供了一种应用于矿井的挂轨式巡检机器人系统,通过自动巡检机器人代替人工巡检,通过挂轨式代替贴地行走式,不仅减少了人工巡视的危险程度及用工成本,降低了工人的劳动强度,而且还增加了巡检机器人的实用性能,使其能够快速稳定到达矿井任何位置,从而实现数据更加全面的采集,提高了矿井工作人员的安全性能。
4.为解决上述的技术问题,本发明提供了一种应用于矿井的挂轨式巡检机器人系统,其特征在于:包括巡检机器人以及充电装置,所述的充电装置固定在轨道的底部,所述的巡检机器人沿着轨道移动并通过与充电装置接触进行充电,所述的轨道为“工”字型导轨,所述的巡检机器人是由行走机构、控制箱、摄像仪、电池组件、天线组件、外壳组件、后盖板组件、前盖板组件、广播组件和麦克组件所组成,所述的前盖板组件和所述的后盖板组件分别安装在外壳组件的前后两端,所述的外壳组件又是由外壳罩和外壳组焊件上下连成一体所组成,所述的行走机构安装在外壳罩内,所述的外壳组件通过行走机构悬挂式连接在轨道的底部并通过行走机构沿着轨道进行移动,所述的控制箱和所述的电池组件都可拆卸地安装在外壳组焊件内,所述外壳组焊件的一侧安装有若干个天线组件,所述的广播组件安装在外壳组焊件的另一侧内,所述外壳组焊件的侧壁上正对着广播组件的位置开设有喇叭孔,所述的摄像仪和所述的麦克组件都安装在外壳组焊件的底部,所述的控制箱分别与行走机构、摄像仪、电池组件、天线组件、广播组件和麦克组件电连接。
5.进一步:所述外壳组焊件底部的前后两端都呈斜面状,外壳组焊件前后两端的斜面上都设置有行驶灯透明窗,所述外壳组焊件的底部内正对着行驶灯透明窗的位置通过螺栓组件安装有行驶灯组件,所述的行驶灯组件也与控制箱电连接。
6.又进一步:所述的行走机构包括电机、行走机构支架、底板、行走轮支架、驱动轴、驱动支架、驱动支架转轴、电机支架、转轴固定块、接近开关支架、行走机构接线腔体、驱动
轮、联轴器、行走轮、压力轮和接近开关,所述的底板水平放置并且其固定在外壳罩内,所述的电机通过电机支架安装在底板的底部,所述的电机支架通过驱动支架转轴与底板相连,所述驱动支架转轴的一端通过转轴固定块以及固定螺栓对电机支架进行固定连接,所述驱动支架转轴的另一端穿过底板与驱动支架的一端相连,所述驱动支架的另一端活动连接在底板的顶部,所述的驱动轮设置有两个,两个驱动轮呈前后水平放置并分别与轨道的两侧外壁相接触,其中一个驱动轮通过联轴器与电机相连,所述驱动轮的前后两侧各设置有一个行走机构支架,所述的行走机构支架通过转向机构连接在底板的顶部,所述驱动轮的前后两侧还各设置有两个行走轮,同一侧的行走轮相对设置并分别与轨道下端的两侧上边沿相接触,所述的行走轮通过行走轮支架安装在行走机构支架上,每个行走轮的正下方都设置有一个压力轮,所述的压力轮也安装在转向机构上并与轨道下端的下边沿相接触,所述底板的前后两端各通过接近开关支架安装有一个接近开关。
7.又进一步:所述的转向机构包括行走机构接线腔体、转向板、转向盘和转向盘固定板,所述的转向盘通过转向盘固定板安装在底板的底部,所述的转向板位于底板的上方并与转向盘相连,所述的行走机构支架设置在转向板上,所述的行走机构接线腔体也安装在底板的底部,所述的控制箱通过行走机构接线腔体与转向盘电连接,所述的转向板带动转向板一同旋转,所述的压力轮安装在行程杆组焊件内,所述的行程杆组焊件的下端伸入至弹簧套内并与其活动连接,所述弹簧套的下端通过弹簧套端盖固定在转向板上,所述的弹簧套的外侧环绕设置有压力轮弹簧,所述压力轮弹簧的两端分别与行程杆组焊件和转向板相连,所述弹簧套的下端内还设置有行程杆限位块。
8.又进一步:所述驱动轮前侧和后侧的底板上还各固定有两个导向轮安装座,同一侧的两个导向轮安装座相对放置并且每个导向轮安装座上都设置有两个导向轮,所述的导向轮通过连接件安装在导向轮弹簧导杆的一端上,所述导向轮弹簧导杆的另一端固定在导向轮安装座上,所述的连接件可沿着导向轮弹簧导杆进行滑动,所述的导向轮弹簧导杆的外侧还环绕设置有导向压缩弹簧,所述导向压缩弹簧的两端分别与导向轮安装座和连接件相连,所述的导向轮与下端下边沿的外壁相接触。
9.又进一步:所述的充电装置是由电极组件、磁铁支架、充电控制器、充电装置安装支架、磁铁罩、安装支架和电磁铁所组成,所述的充电控制器可拆卸地连接在安装支架的底部,所述的安装支架固定在轨道的底部,所述的磁铁罩可拆卸地连接在充电装置安装支架的前端,所述的充电装置安装支架与安装支架前后连成一体,所述的电磁铁通过磁铁支架安装在磁铁罩的前端面上,所述的电极组件设置有两个,两个电极组件分别设置在充电装置安装支架的左右两侧,所述电极组件的顶部设置有与其连成一体的电极外壳卡箍,所述的电极外壳卡箍可拆卸地连接在充电装置安装支架上,所述的磁铁罩与充电装置安装支架之间还设置有磁铁罩密封垫,所述的磁铁罩内的充电装置安装支架上还固定有第一电缆固定头。
10.又进一步:所述的电极组件包括开关支架、电极导杆、电极外壳、电极挡板、球头固定螺母、电极触头、球头、球头弹簧、电极导杆弹簧、开关、第二电缆固定头和电极保护罩,所述的电极外壳卡箍设置在电极外壳的顶部,所述电极外壳的一端设置有第二电缆固定头,所述电极外壳的另一端可拆下地固定有电极挡板,所述电极挡板的中心处开合有通孔,所述的开关通过开关支架安装在电极外壳内,所述开关与电极导杆的一端相连,所述电极导
杆的另一端穿过通孔并且穿过通孔的一端上还开设有导向孔,穿过通孔的电极导杆的一端与通孔之间还设置有球头固定螺母,所述的球头固定螺母内连接有球头,所述球头的一端伸出球头固定螺母与电极触头相连,所述球头的另一端通过球头弹簧连接在电极导杆的导向孔内,所述球头与球头固定螺母的内壁之间还设置有隔离柱,所述电极外壳的内壁上设置有第一凸起部,所述电极导杆位于电极外壳内一段的外壁上还设置有第二凸起部,所述的电极导杆弹簧环绕在电极导杆的外侧并且其的两端分别与第一凸起部和第二凸起部相连,安装有电极挡板的电极外壳一端的外壁上还固定有电极保护罩,所述电极保护罩远离电极外壳的一端上还开设有用于电极触头伸出的通槽。
11.又进一步:所述的后盖板组件包括后盖板、后盖板罩、第一射灯安装座、电极座、电极座套筒、电极座固定板、吸块、吸块球头安装座、吸块球头安装座套筒、第一led射灯和第一测距传感器,所述的后盖板可拆卸地安装在外壳组件的后端,所述的后盖板罩可拆卸地安装在后盖板与外壳组件连接的一侧上,所述的后盖板罩与后盖板之间的连接处设置有后盖板密封垫,所述后盖板远离后盖板罩的一侧安装有吸块球头安装座套筒,所述吸块球头安装座套筒的一端穿过后盖板伸入至后盖板罩内并与吸块球头安装座相连,所述的吸块连接在关节轴承的一端上,所述关节轴承的另一端穿过吸块球头安装座套筒活动连接在吸块球头安装座内,所述的吸块在充电装置内电磁铁吸力的吸引下带动巡检机器人移动使其与电磁铁相连,所述的第一测距传感器安装在后盖板罩内的后盖板上,所述的第一测距传感器位于吸块球头安装座的正下方并且其的一端伸出后盖板,所述吸块左右两侧的后盖板上还各设置有一个电极座,所述后盖板罩内的后盖板上安装有电极座套筒,所述电极座套筒的一端伸出后盖板并且其伸出的一端内还安装有电极座,所述的电极座与连接在电极座套筒另一端的电极座固定板固定连接,在吸块与充电装置内的电磁铁相连时,电极座与充电装置内的电极触头相连,对电池组件进行充电,所述第一测距传感器左右两侧的后盖板上还各设置有一个第一led射灯,所述后盖板罩内的后盖板上安装有第一射灯安装座,所述第一射灯安装座的一端穿过后盖板并且其内部还安装有第一led射灯。
12.又进一步:所述的前盖板组件包括前盖板、前盖板罩、第二射灯安装座、第二led射灯和第二测距传感器,所述的前盖板可拆卸地安装在外壳组件的前端,所述的前盖板罩可拆卸地安装在前盖板与外壳组件连接的一侧上,所述的前盖板罩与前盖板之间的连接处设置有前盖板密封垫,所述的第二测距传感器安装在前盖板罩内的前盖板上,所述的第二测距传感器的一端伸出前盖板,所述第二测距传感器左右两侧的后盖板上还各设置有一个第二led射灯,所述前盖板罩内的前盖板上安装有第二射灯安装座,所述第二射灯安装座的一端穿过前盖板并且其内部还安装有第二led射灯。
13.再进一步:所述的外壳组焊件的底部还安装有温度传感器、烟雾传感器和气体检测传感器,所述的气体检测传感器是由氧气传感器、氮气传感器、二氧化碳传感器、一氧化碳传感器、硫化氢传感器、二氧化硫传感器、二氧化氮传感器、氨气传感器和氢气传感器所组成,所述的温度传感器、烟雾传感器、氧气传感器、氮气传感器、二氧化碳传感器、一氧化碳传感器、硫化氢传感器、二氧化硫传感器、二氧化氮传感器、氨气传感器和氢气传感器分别与控制箱电连接。
14.采用上述结构后,本发明具有以下有益效果:
15.1、本发明通过自动巡检机器人代替人工巡检,通过挂轨式代替贴地行走式,不仅
减少了人工巡视的危险程度及用工成本,降低了工人的劳动强度,而且还增加了巡检机器人的实用性能,使其能够快速稳定到达矿井任何位置,从而实现数据更加全面的采集,提高了矿井工作人员的安全性能;
16.2、本设计的矿井巡检机器人上安装有温度、烟雾、气体等测量环境的传感器,对巷道环境全程实时监控,减少灾害的发生;
17.3、本机器人自带转向机构,弯道巡检时转向灵活,运行稳定可靠;本机器人驱动装置的驱动力可调,可以实现行走、上坡、转弯不打滑,满足巡检需要;
18.4、本机器人防爆型式为矿用本安型,体积小、重量轻,动力消耗低,运行时间长,采用模块化设计,防护等级高,易于安装和维护,非常适合在煤矿高粉尘、高湿度、高瓦斯恶劣环境工作。
19.5、本机器人安装可见光探头,通过内部算法设计具备可识别皮带跑偏、皮带异物入侵和仪表数值等优势;本机器人安装红外热成像探头,可识别对巡检设备机电高温、管道漏气漏水、设备局部故障点等识别报警;
20.6、本机机器人可智能融合煤矿安全监控系统,实现对现场瓦斯、烟雾等监测参数报警后联动巡检,从而提高问题处理效率,进一步降低对现场人员危害的情况。
附图说明
21.下面结合附图和具体实施方式对本发明作进一步详细的说明。
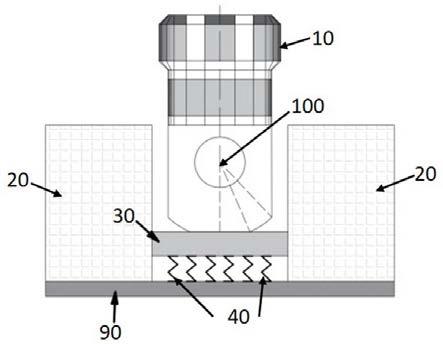
22.图1为本发明的结构示意图。
23.图2为巡检机器人的立体结构图。
24.图3为巡检机器人的右视结构图。
25.图4为巡检机器人的主视结构图。
26.图5为巡检机器人的俯视结构图。
27.图6为巡检机器人的左视结构图。
28.图7为外壳组件的结构图。
29.图8为图7中i的放大图。
30.图9为行走机构的俯视结构图。
31.图10为行走机构的仰视结构图。
32.图11为行走机构的侧视结构图。
33.图12为图9中沿a-a的剖面图。
34.图13为压力轮的安装结构图。
35.图14为充电装置的主视结构图。
36.图15为充电装置的俯视结构图。
37.图16为充电装置的的侧视结构图。
38.图17为电极组件的结构图。
39.图18为后盖板组件的结构图。
40.图19为图18中沿b-b的剖面图。
41.图20为图18中沿c-c的剖面图。
42.图21为前盖板组件的结构图。
43.图22为图21中沿d-d的剖面图。
44.图23为图21中沿e-e的剖面图。
具体实施方式
45.7、如图1、图2、图3、图4、图5、图6和图7所示的一种应用于矿井的挂轨式巡检机器人系统,包括巡检机器人1以及充电装置2,所述的充电装置固定在轨道3的底部,所述的巡检机器人沿着轨道移动并通过与充电装置接触进行充电,所述的轨道为“工”字型导轨,所述的巡检机器人是由行走机构1-1、控制箱1-2、摄像仪1-3、电池组件1-4、天线组件1-5、外壳组件1-6、后盖板组件1-7、前盖板组件1-8、广播组件和麦克组件1-10所组成,所述的前盖板组件和所述的后盖板组件分别安装在外壳组件的前后两端,所述的外壳组件又是由外壳罩1-6-2和外壳组焊件1-6-1上下连成一体所组成,所述的行走机构安装在外壳罩内,所述的外壳组件通过行走机构悬挂式连接在轨道的底部并通过行走机构沿着轨道进行移动,所述的控制箱和所述的电池组件都可拆卸地安装在外壳组焊件内,所述外壳组焊件的一侧安装有若干个天线组件,所述的广播组件安装在外壳组焊件的另一侧内,所述外壳组焊件的侧壁上正对着广播组件的位置开设有喇叭孔1-9,所述的摄像仪和所述的麦克组件都安装在外壳组焊件的底部,所述的控制箱分别与行走机构、摄像仪、电池组件、天线组件、广播组件和麦克组件电连接。本发明通过自动巡检机器人代替人工巡检,通过挂轨式代替贴地行走式,不仅减少了人工巡视的危险程度及用工成本,降低了工人的劳动强度,而且还增加了巡检机器人的实用性能,使其能够快速稳定到达矿井任何位置,从而实现数据更加全面的采集,提高了矿井工作人员的安全性能。本机器人防爆型式为矿用本安型,体积小、重量轻,动力消耗低,运行时间长,采用模块化设计,防护等级高,易于安装和维护,非常适合在煤矿高粉尘、高湿度、高瓦斯恶劣环境工作。本机器人安装可见光探头,通过内部算法设计具备可识别皮带跑偏、皮带异物入侵和仪表数值等优势;本机器人安装红外热成像探头,可识别对巡检设备机电高温、管道漏气漏水、设备局部故障点等识别报警;本机机器人可智能融合煤矿安全监控系统,实现对现场瓦斯、烟雾等监测参数报警后联动巡检,从而提高问题处理效率,进一步降低对现场人员危害的情况。
46.如图4、图7和图8所示的外壳组焊件底部的前后两端都呈斜面状,外壳组焊件前后两端的斜面上都设置有行驶灯透明窗1-6-3,所述外壳组焊件的底部内正对着行驶灯透明窗的位置通过螺栓组件安装有行驶灯组件1-11,所述的行驶灯组件也与控制箱电连接。
47.如图9、图10、图11、图12和图13所示的行走机构包括电机1-1-3、行走机构支架1-1-4、底板1-1-5、行走轮支架1-1-6、驱动轴1-1-16、驱动支架1-1-17、驱动支架转轴1-1-20、电机支架1-1-21、转轴固定块1-1-23、接近开关支架1-1-29、行走机构接线腔体1-1-33、驱动轮1-1-36、联轴器1-1-46、行走轮1-1-49、压力轮1-1-55和接近开关1-1-70,所述的底板水平放置并且其固定在外壳罩内,所述的电机通过电机支架安装在底板的底部,所述的电机支架通过驱动支架转轴与底板相连,所述驱动支架转轴的一端通过转轴固定块以及固定螺栓对电机支架进行固定连接,所述驱动支架转轴的另一端穿过底板与驱动支架的一端相连,所述驱动支架的另一端活动连接在底板的顶部,所述的驱动轮设置有两个,两个驱动轮呈前后水平放置并分别与轨道的两侧外壁相接触,其中一个驱动轮通过联轴器与电机相连,所述驱动轮的前后两侧各设置有一个行走机构支架,所述的行走机构支架通过转向机
构连接在底板的顶部,所述驱动轮的前后两侧还各设置有两个行走轮,同一侧的行走轮相对设置并分别与轨道下端的两侧上边沿相接触,所述的行走轮通过行走轮支架安装在行走机构支架上,每个行走轮的正下方都设置有一个压力轮,所述的压力轮也安装在转向机构上并与轨道下端的下边沿相接触,所述底板的前后两端各通过接近开关支架安装有一个接近开关。
48.如图12和图13所示的转向机构包括行走机构接线腔体1-1-33、转向板1-1-7、转向盘1-1-8和转向盘固定板1-1-9,所述的转向盘通过转向盘固定板安装在底板的底部,所述的转向板位于底板的上方并与转向盘相连,所述的行走机构支架设置在转向板上,所述的行走机构接线腔体也安装在底板的底部,所述的控制箱通过行走机构接线腔体与转向盘电连接,所述的转向板带动转向板一同旋转,所述的压力轮安装在行程杆组焊件1-1-1内,所述的行程杆组焊件的下端伸入至弹簧套1-1-11内并与其活动连接,所述弹簧套的下端通过弹簧套端盖1-1-12固定在转向板上,所述的弹簧套的外侧环绕设置有压力轮弹簧1-1-56,所述压力轮弹簧的两端分别与行程杆组焊件和转向板相连,所述弹簧套的下端内还设置有行程杆限位块1-1-13。
49.如图9所示驱动轮前侧和后侧的底板上还各固定有两个导向轮安装座1-1-25,同一侧的两个导向轮安装座相对放置并且每个导向轮安装座上都设置有两个导向轮1-1-51,所述的导向轮通过连接件1-1-27安装在导向轮弹簧导杆1-1-26的一端上,所述导向轮弹簧导杆的另一端固定在导向轮安装座上,所述的连接件可沿着导向轮弹簧导杆进行滑动,所述的导向轮弹簧导杆的外侧还环绕设置有导向压缩弹簧1-1-52,所述导向压缩弹簧的两端分别与导向轮安装座和连接件相连,所述的导向轮与下端下边沿的外壁相接触。
50.采用上述行走机构后,本发明通过自带的转向机构在弯道巡检时转向更加灵活,运行稳定可靠;本机器人驱动装置的驱动力可调,可以实现行走、上坡、转弯不打滑,满足巡检需要。
51.如图14、图15和图16的充电装置是由电极组件2-1、磁铁支架2-2、充电控制器2-3、充电装置安装支架2-4、磁铁罩2-5、安装支架2-6和电磁铁2-8所组成,所述的充电控制器可拆卸地连接在安装支架的底部,所述的安装支架固定在轨道的底部,所述的磁铁罩可拆卸地连接在充电装置安装支架的前端,所述的充电装置安装支架与安装支架前后连成一体,所述的电磁铁通过磁铁支架安装在磁铁罩的前端面上,所述的电极组件设置有两个,两个电极组件分别设置在充电装置安装支架的左右两侧,所述电极组件的顶部设置有与其连成一体的电极外壳卡箍2-10,所述的电极外壳卡箍可拆卸地连接在充电装置安装支架上,所述的磁铁罩与充电装置安装支架之间还设置有磁铁罩密封垫2-7,所述的磁铁罩内的充电装置安装支架上还固定有第一电缆固定头2-9。本发明通过电磁吸力对巡检机器人进行吸引,并通过电极组件的特殊结构设计使其能够与巡检机器人的接触电极良好接触,彼此之间不会留有空隙,从而防止在充电的过程中产生火花,起到了提高安全性能的作用;而且本发明通过采用上述方法使巡检机器人与充电装置主体在接触时不会发生不必要的碰撞,防止火花的产生;并且通过电磁铁的吸力,起到限位作用,防止机器人发生移动,造成电极接合面之间有缝隙,使充电不可靠
52.如图17所示的电极组件包括开关支架2-1-1、电极导杆2-1-2、电极外壳2-1-3、电极挡板2-1-4、球头固定螺母2-1-5、电极触头2-1-6、球头2-1-11、球头弹簧2-1-12、电极导
杆弹簧2-1-13、开关2-1-14、第二电缆固定头2-1-15和电极保护罩2-1-19,所述的电极外壳卡箍设置在电极外壳的顶部,所述电极外壳的一端设置有第二电缆固定头,所述电极外壳的另一端可拆下地固定有电极挡板,所述电极挡板的中心处开合有通孔,所述的开关通过开关支架安装在电极外壳内,所述开关与电极导杆的一端相连,所述电极导杆的另一端穿过通孔并且穿过通孔的一端上还开设有导向孔2-1-2-1,穿过通孔的电极导杆的一端与通孔之间还设置有球头固定螺母,所述的球头固定螺母内连接有球头,所述球头的一端伸出球头固定螺母与电极触头相连,所述球头的另一端通过球头弹簧连接在电极导杆的导向孔内,所述球头与球头固定螺母的内壁之间还设置有隔离柱,所述电极外壳的内壁上设置有第一凸起部2-1-3-1,所述电极导杆位于电极外壳内一段的外壁上还设置有第二凸起部2-1-2-2,所述的电极导杆弹簧环绕在电极导杆的外侧并且其的两端分别与第一凸起部和第二凸起部相连,安装有电极挡板的电极外壳一端的外壁上还固定有电极保护罩,所述电极保护罩远离电极外壳的一端上还开设有用于电极触头伸出的通槽。本发明的电极触头采用万向球头结构,充电过程与电极座对接时,保证了电极触头和电极座的两个接合面完全贴合、无缝隙,降低对接精度要求,实现可靠充电。
53.如图18、图19和图20所示的后盖板组件包括后盖板1-7-1、后盖板罩1-7-2、第一射灯安装座1-7-4、电极座1-7-5、电极座套筒1-7-6、电极座固定板1-7-7、吸块1-7-8、吸块球头安装座1-7-9、吸块球头安装座套筒1-7-10、第一led射灯1-7-12和第一测距传感器1-7-23,所述的后盖板可拆卸地安装在外壳组件的后端,所述的后盖板罩可拆卸地安装在后盖板与外壳组件连接的一侧上,所述的后盖板罩与后盖板之间的连接处设置有后盖板密封垫1-7-3,所述后盖板远离后盖板罩的一侧安装有吸块球头安装座套筒,所述吸块球头安装座套筒的一端穿过后盖板伸入至后盖板罩内并与吸块球头安装座相连,所述的吸块连接在关节轴承1-7-21的一端上,所述关节轴承的另一端穿过吸块球头安装座套筒活动连接在吸块球头安装座内,所述的吸块在充电装置内电磁铁吸力的吸引下带动巡检机器人移动使其与电磁铁相连,所述的第一测距传感器安装在后盖板罩内的后盖板上,所述的第一测距传感器位于吸块球头安装座的正下方并且其的一端伸出后盖板,所述吸块左右两侧的后盖板上还各设置有一个电极座,所述后盖板罩内的后盖板上安装有电极座套筒,所述电极座套筒的一端伸出后盖板并且其伸出的一端内还安装有电极座,所述的电极座与连接在电极座套筒另一端的电极座固定板固定连接,在吸块与充电装置内的电磁铁相连时,电极座与充电装置内的电极触头相连,对电池组件进行充电,所述第一测距传感器左右两侧的后盖板上还各设置有一个第一led射灯,所述后盖板罩内的后盖板上安装有第一射灯安装座,所述第一射灯安装座的一端穿过后盖板并且其内部还安装有第一led射灯。本发明通过关节轴承的设计使吸块在充电时与电磁铁的两个接合面完全贴合、无缝隙,降低对接精度要求,实现可靠充电。
54.如图21、图22和图23所示的前盖板组件包括前盖板1-8-1、前盖板罩1-8-2、第二射灯安装座1-8-4、第二led射灯1-8-5和第二测距传感器1-8-9,所述的前盖板可拆卸地安装在外壳组件的前端,所述的前盖板罩可拆卸地安装在前盖板与外壳组件连接的一侧上,所述的前盖板罩与前盖板之间的连接处设置有前盖板密封垫1-8-3,所述的第二测距传感器安装在前盖板罩内的前盖板上,所述的第二测距传感器的一端伸出前盖板,所述第二测距传感器左右两侧的后盖板上还各设置有一个第二led射灯,所述前盖板罩内的前盖板上安
装有第二射灯安装座,所述第二射灯安装座的一端穿过前盖板并且其内部还安装有第二led射灯。
55.上述的外壳组焊件的底部还安装有温度传感器、烟雾传感器和气体检测传感器,所述的气体检测传感器是由氧气传感器、氮气传感器、二氧化碳传感器、一氧化碳传感器、硫化氢传感器、二氧化硫传感器、二氧化氮传感器、氨气传感器和氢气传感器所组成,所述的温度传感器、烟雾传感器、氧气传感器、氮气传感器、二氧化碳传感器、一氧化碳传感器、硫化氢传感器、二氧化硫传感器、二氧化氮传感器、氨气传感器和氢气传感器分别与控制箱电连接。本发明的矿井巡检机器人上安装有温度、烟雾、气体等测量环境的传感器,对巷道环境全程实时监控,减少灾害的发生。
56.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。