1.本实用新型属于机器人技术领域,尤其涉及一种面向失独老人的智能服务机器人。
背景技术:
2.很多老年人在孩子发生意外等后成为失独老人,在生活中以无人陪伴的形式渡过晚年,跌倒发生率很高,增加死亡危险,且对孩子充满思念。
3.专利号为 200910049877.9 的名为“智能帮扶式助行机器人的自主跟踪与导航系统”提供了一种携扶老人行走的辅助系统。但是这种系统由于过于复杂、缺乏交互性,因而对使用的老人有很高的要求,如果操作不当可能会造成无法挽回的损失,且该系统对于失独老人没有特殊的陪伴方式。
技术实现要素:
4.本实用新型的目的在于提供一种面向失独老人的智能服务机器人,该机器人可在老人行走时帮扶老人,同时在老人与机器人接触时,可播放孩子的声音,充分慰藉失独老人心理。
5.为实现上述目的,本实用新型提供如下技术方案:一种面向失独老人的智能服务机器人,该面向失独老人的智能服务机器人包括机器人躯体、显示屏、三关节机械臂、控制芯片,所述显示屏位于机器人躯体上端,所述控制芯片固定在机器人躯体内部,显示屏与控制芯片电信号连接,可通过控制芯片控制显示屏转动,所述三关节机械臂设有两个,分别转动连接在机器人躯体两侧,三关节机械臂由控制芯片控制转动,三关节机械臂远离机器人躯体端转动连接有拉手组件,拉手组件与控制芯片电信号连接,所述机器人躯体底部还设有行走组件。
6.进一步的,所述行走组件包括开设在所述机器人躯体底部的通槽,通槽关于机器人躯体底部对称设置,每个通槽内部转动连接有驱动轮,每个驱动轮均固定连接有驱动电机,驱动电机固定在机器人躯体内部。
7.采用上述方案:两个驱动轮分开进行控制,在两个驱动电机转速不一致时,可控制转弯行走。
8.进一步的,两个所述驱动轮之间设有陀螺仪,陀螺仪固定在机器人躯体内部。
9.采用上述方案:采用陀螺仪,保持机器人行走的平衡,防止机器人倾倒。
10.进一步的,所述显示屏朝向机器人躯体端设有连接架,显示屏转动连接在连接架内部,连接架远离显示屏端固定有连接曲杆,连接曲杆远离连接架端固定在机器人躯体上端,显示屏朝向连接架端还固定有伺服电机,由伺服电机控制显示屏转动。
11.采用上述方案:显示屏可进行随时转动。
12.进一步的,所述显示屏上还固定有第一红外感应器,第一红外感应器与所述控制芯片、所述伺服电机串联,通过电信号连接。
13.采用上述方案:显示屏可在红外感应器的控制下,随着老人的移动,跟随老人移动方向转动,随时面向老人。
14.进一步的,所述显示屏底部还固定有扬声器,扬声器连接有调制变声器,调制变声器固定在显示屏底部。
15.采用上述方案:通过调制变声器可将扬声器传播的声音更换成失独老人的孩子声音,提升机器人服务的亲切感,提升孩子随时陪伴老人的体验感。
16.进一步的,所述拉手组件包括转动连接在所述三关节机械臂上的支撑板,支撑板远离三关节机械臂端固定有弧形拉手,弧形拉手朝向支撑板内侧固定有温度传感器模块,温度传感器模块与所述控制芯片电信号连接,与扬声器、控制芯片形成电回路。
17.采用上述方案:通过弧形拉手可在老人需要时与老人扶持牵手,同时弧形拉手内部设置温度传感器模块,在牵手时,可自动触发控制芯片的电信号,控制扬声器播放失独老人的孩子声音,给老人孩子陪伴的感受。
18.进一步的,所述三关节机械臂上还嵌设有第二红外感应器,第二红外感应器与所述控制芯片电信号连接,通过控制芯片控制三关节机械臂转动。
19.采用上述方案:在老人接触三关节机械臂,通过感应可自动控制三关节机械臂转动与老人牵手,或扶持老人行走、
20.本实用新型的有益效果是:
21.1、显示屏和三关节机械臂均可感应老人位置,与老人行走一致,可随时与老人沟通,并在显示屏上播放各种信息,三关节机械臂可对老人进行扶持和拉手。
22.2、通过调制变声器可将扬声器传播的声音更换成失独老人的孩子声音,提升机器人服务的亲切感,提升孩子随时陪伴老人的体验感。
23.3、通过弧形拉手可在老人需要时与老人扶持牵手,同时弧形拉手内部设置温度传感器模块,在牵手时,可自动触发控制芯片的电信号,控制扬声器播放失独老人的孩子声音,给老人孩子陪伴的感受。
附图说明
24.图1是本实用新型提供的一种面向失独老人的智能服务机器人的结构示意图;
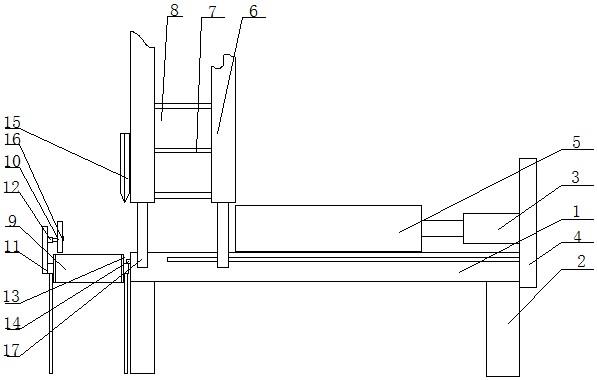
25.图2是本实用新型提供的一种面向失独老人的智能服务机器人的图1的正面结构示意图;
26.图3是本实用新型提供的一种面向失独老人的智能服务机器人的图2中沿a-a线剖视示意图;
27.图4是本实用新型提供的一种面向失独老人的智能服务机器人的显示屏后端示意图;
28.图5是本实用新型提供的一种面向失独老人的智能服务机器人的图4中i处放大示意图。
29.图中:1、机器人躯体;2、显示屏;3、三关节机械臂;4、控制芯片;5、拉手组件;6、行走组件;7、通槽;8、驱动轮;9、驱动电机;10、陀螺仪;11、连接架;12、连接曲杆;13、伺服电机;14、第一红外感应器;15、扬声器;16、调制变声器;17、支撑板;18、弧形拉手;19、温度传感器模块;20、第二红外感应器。
具体实施方式
30.为能进一步了解本实用新型的实用新型内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
31.请同时参考图1至图5,下面将结合附图对本实用新型实施例的面向失独老人的智能服务机器人作详细说明。
32.如图1所示,该面向失独老人的智能服务机器人包括机器人躯体1、显示屏2、三关节机械臂3、控制芯片4,所述显示屏2位于机器人躯体1上端,所述控制芯片4固定在机器人躯体1内部,显示屏2与控制芯片4电信号连接,可通过控制芯片4控制显示屏2转动,所述三关节机械臂3设有两个,分别转动连接在机器人躯体1两侧,三关节机械臂3由控制芯片4控制转动,三关节机械臂3远离机器人躯体1端转动连接有拉手组件5,拉手组件5与控制芯片4电信号连接,所述机器人躯体1底部还设有行走组件6。
33.具体的,如图2和图3所示,行走组件6包括开设在所述机器人躯体1底部的通槽7,通槽7关于机器人躯体1底部对称设置,每个通槽7内部转动连接有驱动轮8,每个驱动轮8均固定连接有驱动电机9,驱动电机9固定在机器人躯体1内部。
34.其中,两个所述驱动轮8之间设有陀螺仪10,陀螺仪10固定在机器人躯体1内部。
35.在行走时,通过两个驱动电机9驱动驱动轮8进行转动,且两个驱动电机9之间独立,因此在两个驱动电机9的转速不一致时,可实现机器人的转弯行走,同时底部设置陀螺仪,在行走时可保持平衡。
36.具体的,如图4所示,显示屏2朝向机器人躯体1端设有连接架11,显示屏2转动连接在连接架11内部,连接架11远离显示屏2端固定有连接曲杆12,连接曲杆12远离连接架11端固定在机器人躯体1上端,显示屏2向连接架11端还固定有伺服电机13,由伺服电机13控制显示屏2转动。
37.其中,显示屏2上还固定有第一红外感应器14,第一红外感应器14与所述控制芯片4、所述伺服电机13串联,通过电信号连接,显示屏2底部还固定有扬声器15,扬声器15连接有调制变声器16,调制变声器16固定在显示屏2底部。
38.在老人行走时,由第一红外传感器14进行感应老人位置,在未检测到老人位置时,触发电信号,由控制芯片4控制伺服电机13打开,控制显示屏2进行转动,随时朝向老人,同时在显示屏2内部,可播放关于孩子的日常活动,且可播放新闻等老人爱好看的相关内容。
39.同时由扬声器15播放的声音,可在调制变声器16的变声下,改变成失独老人孩子的声音,陪伴老人。
40.如图5所示,拉手组件5包括转动连接在所述三关节机械臂3上的支撑板17,支撑板17远离三关节机械臂3端固定有弧形拉手18,弧形拉手18朝向支撑板17内侧固定有温度传感器模块19,温度传感器模块19与所述控制芯片4电信号连接,与扬声器15、控制芯片4形成电回路。
41.且在三关节机械臂3上还嵌设有第二红外感应器20,第二红外感应器20与所述控制芯片4电信号连接,通过控制芯片4控制三关节机械臂3转动。
42.在老人靠近机器人躯体1时,第二红外感应器20可进行触发电信号,由控制芯片4控制三关节机械臂3进行转动,可扶持老人行走,同时老人可拉住弧形拉手18,在拉住时,位于弧形拉手18内侧的温度传感器模块19感受手部温度,触发电信号,由控制芯片4控制打开
扬声器15,播放孩子的声音,给老人与孩子牵手的感受。
43.上述的红外感应器、温度传感器模块等均为现有市场可购买产品。
44.本实用新型的工作原理是:通过扬声器15和显示屏2可显示和播放失独老人的孩子的声音和画面,给老人慰藉,同时在老人靠近机器人躯体1时,三关节手臂可自动转动,与老人扶持和牵手,牵手时可触发扬声器15播放孩子声音。
45.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。