1.本发明应用于信息化装备背景,名称是信息化装备智能管理系统。
背景技术:
2.随着中国经济的发展,科技的进步,许多产业已被机器人替代,汽车流水线的焊接机器人,智能化的无人驾驶汽车,航拍无人机等等。无人机在侦查、航拍、测绘农业植保等方面的应用已经十分广泛了。
3.在农业方面,水果是司空见惯的,但是在果树生产过程中,病虫害常常又给果树生产造成严重危害,使得果树减产和降低品质,给果农们造成了极大的困扰。随着科技的发展,无人机喷药已经成为一种新型防治病虫害的手段,但细致方面做得还不够到位,比如病虫不是靠药水冲洗下来的,而是靠内吸、触杀、熏蒸而杀灭的,水大易使植物气孔关闭,反而吸收少,流水多,若只增加用药量,不增加用水量,导致药液浓度加大,且药液量少而难以在果树上均匀周到喷洒,影响防治效果,甚至造成药害。故有必要提供信息化装备智能管理系统,可以达到高效控制喷洒功能智能植保无人机的作用。
技术实现要素:
4.本发明的目的在于提供信息化装备智能管理系统,以解决上述背景技术中提出的问题。
5.为了解决上述技术问题,本发明提供如下技术方案:信息化装备智能管理系统,包含包括满航飞行模块、捕捉分析模块和药水控制模块,所述满航飞行模块用于控制无人机喷药,所述捕捉分析模块用于扫描分析果树状态,所述药水控制模块用于控制药水量和比例,所述满航飞行模块和药水控制模块电连接,所述捕捉分析模块和药水控制模块电连接。
6.在一个实施例中,所述满航飞行模块包括轨道规划子模块、低能预警子模块、储存路线子模块和自动返航子模块,所述轨道规划子模块用于规划飞行的轨道,所述轨道规划子模块包括数据读取单元,所述数据读取单元用于对存储的喷洒路线进行读取,所述低能预警子模块用于无人机开启低电警告,所述储存路线子模块用于在无人机续航电量低或药水位低时,储存已喷药路线,所述自动返航子模块用于在无人机续航电量低或药水位低时自动回航,所述自动回航子模块包括信息接收单元,所述信息接收单元用于接收药水量低的信息,所述轨道规划子模块和低能预警子模块电连接,所述储存路线子模块和自动返航子模块电连接。
7.在一个实施例中,所述捕捉分析模块包括虫洞捕捉子模块、病状分析子模块、根部状态分析子模块和对象扫描子模块,所述虫洞捕捉子模块用于捕捉果树上虫害情况,所述病状分析子模块用于分析受虫害程度,所述根部状态分析子模块用于分析根部土壤缺水情况,所述对象扫描子模块用于扫描果树根部土壤,所述虫洞捕捉子模块和病状分析子模块电连接,所述对象扫描子模块和根部状态分析子模块电连接;
8.所述虫洞捕捉子模块包括红外扫描单元和拍摄储存单元,所述红外扫描单元用于
扫描果树树叶虫害情况,所述拍摄储存单元用于拍摄储存虫害树叶视频,所述红外扫描单元和拍摄储存单元电连接,所述病状分析子模块包括图像采集单元和绿色占比分析单元,所述图像采集单元用于对于所拍视频帧数进行图像采集,所述绿色占比分析单元用于将采集图像进行绿色占比分析,所述图像采集单元和绿色占比分析单元电连接,所述根部状态分析子模块包括粉尘监测单元,所述粉尘监测单元用于检测土壤湿度,所述对象扫描子模块包括红外测距单元,所述红外测距单元用于分辨所扫描的物体信息。
9.在一个实施例中,所述药水控制模块包括注口调节子模块、喷头控制子模块和电子水位计子模块,所述注口调节子模块用于调节药水比例,所述喷头控制子模块用于控制喷头开启关闭,所述电子水位计子模块用于药水位低时进行预警,所述电子水位计子模块包括信息传输单元,所述信息传输单元用于传输药水量低的信息。
10.在一个实施例中,所述信息装备智能管理系统主要包括以下步骤:
11.步骤s1:无人机起飞后,根据果园大小轨道规划子模块规划路线;
12.步骤s2:捕捉分析模块对果园情况进行捕捉分析;
13.步骤s3:根部状态分析子模块对土壤缺水情况进行分析;
14.步骤s4:根据分析情况,药水控制模块开始药水喷洒;
15.步骤s5:在无人机续航电量低或药水位低时自动回航。
16.在一个实施例中,所述步骤s2进一步包括以下步骤:
17.步骤s21:红外扫描单元对果树进行扫描;
18.步骤s22:虫洞捕捉子模块对果树树叶虫洞情况进行捕捉,拍摄储存单元对捕捉情况进行拍摄储存;
19.步骤s23:根据所捕捉拍摄视频的帧张,图像采集单元对虫害树叶进行图像采集;
20.步骤s24:绿色占比分析单元将计算所采集的图像中绿色占比率;
21.步骤s25:根据比对结果,病状分析子模块分析当前区域受虫害程度。
22.在一个实施例中,所述步骤s24中,绿色占比率t计算公式为:
[0023][0024]
其中t为图像中绿色占比率,无人机在果树上方飞行过程中,从所拍摄的视频帧张中,采集到当前果树特写的图像,n为图像中绿色区域大小面积,v为绿色区域内其他颜色的面积,果树树叶被啃食后,会出现黄色的部分和虫洞,被虫害的部分越多,其他颜色的面积v的值越大,绿色占比率越低。
[0025]
在一个实施例中,所述步骤s4进一步包括以下步骤:
[0026]
步骤s41:喷头控制子模块用于开启药水喷洒功能;
[0027]
步骤s42:将农药与水分别在两个容器里,通过注口使农药与水混合,注口调节子模块按照所需比例调配好药水;
[0028]
所述步骤s42进一步包括以下步骤:
[0029]
步骤s421:当绿色占比度达到80%,按照1:350的比例调配;
[0030]
步骤s422:当遇到受虫害程度轻度严重时,当绿色占比度达到60%,按1:300的比例调配;
[0031]
步骤s423:当遇到受虫害程度严重时,当绿色占比度达到30%,按1:250的比例调
配。
[0032]
在一个实施例中,所述步骤s3进一步包括以下步骤:
[0033]
步骤s31:无人机飞行轨道中红外测距单元不断向下与红外所测到物体进行垂直测距,当所测距离等同于无人机飞行高度,则无人机飞到果树种植间距的上空,红外所测到的物体是地面,对象扫描子模块开始对果树之间土壤进行扫描;
[0034]
步骤s32:无人机在飞行期间,因螺旋转动对一定范围内产生气流,当果树之间土壤水分含量较少时,受气流影响易造成泥土粉尘飘扬,反之当土壤较为湿润时当前气流无法对其产生影响,粉尘监测单元使无人机实时监测气流中的粉尘情况;
[0035]
步骤s33:根据所检测的土壤粉尘情况,根部状态分析子模块分析果树是否缺水;
[0036]
步骤s34:若土壤略干,注口调节子模块关闭农药注口,无人机对所扫描的区域进行降水。
[0037]
在一个实施例中,所述步骤s5进一步包括以下步骤:
[0038]
步骤s51:当检测到无人机电量达到低量时,低能预警子模块对无人机开启低电警告;
[0039]
步骤s52:同时储存路线子模块储存已喷药路线;
[0040]
步骤s53:当电子水位计子模块检测到药水处于低水位时,信息传输单元对无人机传输低水位信息;
[0041]
步骤s54:信息接收单元一旦接收到低电警告或低水位信息,自动返航子模块会回航补充;
[0042]
步骤s55:补充好电量或药水量后,数据读取单元读取之前存储的已喷洒路线,接着根据规划的轨道继续喷洒。
[0043]
与现有技术相比,本发明所达到的有益效果是:本发明,可以根据被虫害程度,调节药水比例,更改药水浓度,可以根据地面粉尘情况,对果树进行浇水,可以在无人机低能或药水位低的时候,标记所处位置,补充好电量或药水后,方便接着喷洒。
附图说明
[0044]
下面结合附图,通过对本技术的具体实施方式详细描述,将使本技术的技术方案及其它有益效果显而易见。
[0045]
在附图中:
[0046]
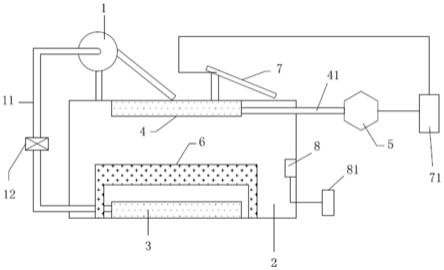
图1是本发明的整体结构示意图。
具体实施方式
[0047]
下文的公开提供了许多不同的实施方式或例子用来实现本技术的不同结构。为了简化本技术的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本技术。此外,本技术可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本技术提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
[0048]
请参阅图1,本发明提供技术方案:信息化装备智能管理系统,包含满航飞行模块、
捕捉分析模块和药水控制模块,满航飞行模块用于控制无人机喷药,捕捉分析模块用于扫描分析果树状态,药水控制模块用于控制药水量和比例,满航飞行模块和药水控制模块电连接,捕捉分析模块和药水控制模块电连接。
[0049]
满航飞行模块包括轨道规划子模块、低能预警子模块、储存路线子模块和自动返航子模块,轨道规划子模块用于规划飞行的轨道,轨道规划子模块包括数据读取单元,数据读取单元用于对存储的喷洒路线进行读取,低能预警子模块用于无人机开启低电警告,储存路线子模块用于在无人机续航电量低或药水位低时,储存已喷药路线,自动返航子模块用于在无人机续航电量低或药水位低时自动回航,自动回航子模块包括信息接收单元,信息接收单元用于接收药水量低的信息,轨道规划子模块和低能预警子模块电连接,储存路线子模块和自动返航子模块电连接。
[0050]
捕捉分析模块包括虫洞捕捉子模块、病状分析子模块、根部状态分析子模块和对象扫描子模块,虫洞捕捉子模块用于捕捉果树上虫害情况,病状分析子模块用于分析受虫害程度,根部状态分析子模块用于分析根部土壤缺水情况,对象扫描子模块用于扫描果树根部土壤,虫洞捕捉子模块和病状分析子模块电连接,对象扫描子模块和根部状态分析子模块电连接;
[0051]
虫洞捕捉子模块包括红外扫描单元和拍摄储存单元,红外扫描单元用于扫描果树树叶虫害情况,拍摄储存单元用于拍摄储存虫害树叶视频,红外扫描单元和拍摄储存单元电连接,病状分析子模块包括图像采集单元和绿色占比分析单元,图像采集单元用于对于所拍视频帧数进行图像采集,绿色占比分析单元用于将采集图像进行绿色占比分析,图像采集单元和绿色占比分析单元电连接,根部状态分析子模块包括粉尘监测单元,粉尘监测单元用于检测土壤湿度,对象扫描子模块包括红外测距单元,红外测距单元用于分辨所扫描的物体信息。
[0052]
药水控制模块包括注口调节子模块、喷头控制子模块和电子水位计子模块,注口调节子模块用于调节药水比例,喷头控制子模块用于控制喷头开启关闭,电子水位计子模块用于药水位低时进行预警,电子水位计子模块包括信息传输单元,信息传输单元用于传输药水量低的信息。
[0053]
信息装备智能管理系统主要包括以下步骤:
[0054]
步骤s1:无人机起飞后,根据果园大小轨道规划子模块规划路线;
[0055]
步骤s2:捕捉分析模块对果园情况进行捕捉分析;
[0056]
步骤s3:根部状态分析子模块对土壤缺水情况进行分析;
[0057]
步骤s4:根据分析情况,药水控制模块开始药水喷洒;
[0058]
步骤s5:在无人机续航电量低或药水位低时自动回航。
[0059]
步骤s2进一步包括以下步骤:
[0060]
步骤s21:红外扫描单元对果树进行扫描;
[0061]
步骤s22:虫洞捕捉子模块对果树树叶虫洞情况进行捕捉,拍摄储存单元对捕捉情况进行拍摄储存;
[0062]
步骤s23:根据所捕捉拍摄视频的帧张,图像采集单元对虫害树叶进行图像采集;
[0063]
步骤s24:绿色占比分析单元将计算所采集的图像中绿色占比率;
[0064]
步骤s25:根据比对结果,病状分析子模块分析当前区域受虫害程度。
[0065]
步骤s24中,绿色占比率t计算公式为:
[0066][0067]
其中t为图像中绿色占比率,无人机在果树上方飞行过程中,从所拍摄的视频帧张中,采集到当前果树特写的图像,n为图像中绿色区域大小面积,v为绿色区域内其他颜色的面积,果树树叶被啃食后,会出现黄色的部分和虫洞,被虫害的部分越多,其他颜色的面积v的值越大,绿色占比率越低。
[0068]
步骤s4进一步包括以下步骤:
[0069]
步骤s41:喷头控制子模块用于开启药水喷洒功能;
[0070]
步骤s42:将农药与水分别在两个容器里,通过注口使农药与水混合,注口调节子模块按照所需比例调配好药水;
[0071]
步骤s42进一步包括以下步骤:
[0072]
步骤s421:当绿色占比度达到80%,按照1:350的比例调配;
[0073]
步骤s422:当遇到受虫害程度轻度严重时,当绿色占比度达到60%,按1:300的比例调配;
[0074]
步骤s423:当遇到受虫害程度严重时,当绿色占比度达到30%,按1:250的比例调配。
[0075]
步骤s3进一步包括以下步骤:
[0076]
步骤s31:无人机飞行轨道中红外测距单元从空中向下进行垂直测距,当所测距离较远,则无人机飞到果树种植间距的上空,对象扫描子模块开始对果树之间土壤进行扫描;
[0077]
步骤s32:无人机在飞行期间,因螺旋转动对一定范围内产生气流,当果树之间土壤水分含量较少时,受气流影响易造成泥土粉尘飘扬,反之当土壤较为湿润时当前气流无法对其产生影响,粉尘监测单元使无人机实时监测气流中的粉尘情况;
[0078]
步骤s33:根据所检测的土壤粉尘情况,根部状态分析子模块分析果树是否缺水;
[0079]
步骤s34:若土壤略干,注口调节子模块关闭农药注口,无人机对所扫描的区域进行降水。
[0080]
步骤s5进一步包括以下步骤:
[0081]
步骤s51:当检测到无人机电量达到低量时,低能预警子模块对无人机开启低电警告;
[0082]
步骤s52:同时储存路线子模块储存已喷药路线;
[0083]
步骤s53:当电子水位计子模块检测到药水处于低水位时,信息传输单元对无人机传输低水位信息;
[0084]
步骤s54:信息接收单元一旦接收到低电警告或低水位信息,自动返航子模块会回航补充;
[0085]
步骤s55:补充好电量或药水量后,数据读取单元读取之前存储的已喷洒路线,接着根据规划的轨道继续喷洒。
[0086]
实施例1,所述无人机进入果园,根据规划轨道,开始进行扫描,对于果园的情况进行拍摄储存,从所拍摄的视频帧数中,采集了一张图像,图像中绿色部分有n=50cm2,绿色
中其它颜色部分v=5cm2,绿色占比率为虫害程度较轻,无人机按照1:350的比例调配药水进行喷洒,当红外测距检测到地面,检测到粉尘量较少,则无人机关闭喷洒功能,到下一棵果树前再打开。
[0087]
实施例2,所述无人机进入果园,根据规划轨道,开始进行扫描,对于果园的情况进行拍摄储存,从所拍摄的视频帧数中,采集了一张图像,图像中绿色部分有n=80cm2,绿色中其它颜色部分v=40cm2,绿色占比率为虫害程度轻度严重,无人机按照1:300的比例调配药水进行喷洒,当红外测距检测到地面,检测到粉尘量较少,则无人机关闭喷洒功能,到下一棵果树前再打开。
[0088]
实施例3,所述无人机进入果园,根据规划轨道,开始进行扫描,对于果园的情况进行拍摄储存,从所拍摄的视频帧数中,采集了一张图像,图像中绿色部分有n=90cm2,绿色中其它颜色部分v=65cm2,绿色占比率为虫害程度严重,无人机按照1:250的比例调配药水进行喷洒,当红外测距检测到地面,检测到粉尘量较多时,则无人机关闭农药注口,对所扫描的区域进行降水,到下一棵果树前再打开农药注口。
[0089]
在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的。
[0090]
以上对本技术实施例所提供的一种清洗装置进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的技术方案及其核心思想;本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例的技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。