1.本发明涉及建筑结构风场分析、图像识别技术领域,具体涉及一种基于多尺度输入神经网络的建筑风场地面粗糙度识别方法。
背景技术:
2.建筑结构风洞实验中风场的模拟需要提前确定地面粗糙度类别,进而根据基本风压等参数确定相应的风剖面。确定地面粗糙度类别的常规方法包括规范定性判别法、esdu数字风力模型法和地形模拟试验法,其中规范定性判别法主要根据规范对场地情况的定性描述对待测结构周边环境类别进行判断,主观影响因素较大,且对于周边环境元素较多的情况,该方法判断结果可靠性较低;地形模拟试验法涉及到模型制作、测点布置等,试验周期较长,效率较低,在实际项目较多的情况下难以实施;esdu方法通过对给定范围内的风力进行计算判定结构风场类别,该方法可靠性较高,但涉及到复杂的计算过程,整体实施效率有待提高,且对于一般技术人员难以完全掌握。因此,如何高效高精度地进行建筑风场地面粗糙度识别,是结构风工程试验模拟亟待解决的问题。
3.随着计算机视觉技术的发展和应用,基于深度学习的图像识别分类方法受到了广泛的关注。目前已有的图像识别分类方法大多被应用于单尺度图像的识别,因为建筑周边环境元素包括建筑、道路、河流、草地、海岸、树木等,并且不同半径范围内的环境元素对地面粗糙度的影响也不同,单尺度图像很难全面反映建筑风场的地面特征,难以满足建筑风场地面粗糙度识别的要求。目前缺少通过图像识别建筑风场地面粗糙度的方法。
技术实现要素:
4.本发明提供一种基于多尺度输入神经网络的建筑风场地面粗糙度识别方法,以克服地面粗糙度常规判断方法识别精度低、执行效率差的缺点,用以提升建筑风场试验模拟的准确性和效率。
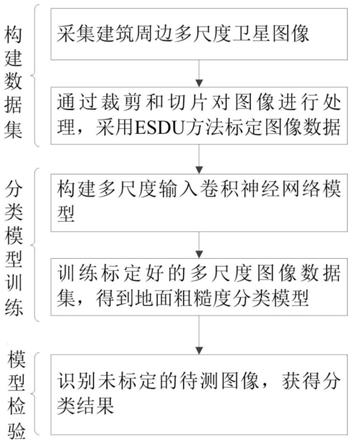
5.本发明基于多尺度输入神经网络的建筑风场地面粗糙度识别方法,包括如下步骤:
6.s1.根据建筑周边范围大小划分至少2个尺度,采集所述建筑周边不同尺度的卫星图像获得样本图像,所述样本图像预处理为圆形,并将圆形的所述样本图像等分为至少8个扇形图;
7.s2.采用esdu方法标定所述扇形图内区域的地面粗糙度;
8.s3.构建多尺度输入卷积神经网络模型,采用相互独立的卷积神经网络分别训练输入的每种尺度的扇形图,至softmax层输出结果;
9.s4.在softmax层对多种尺度扇形图的训练输出结果进行融合,融合时根据尺度分配权重,加权计算后得到最终的分类结果,根据所述分类结果及所述esdu方法的地面粗糙度标定标签计算loss函数;
10.s5.对比所述loss函数值收敛误差,当误差小于0.5%,则模型训练完成,得到分类
模型;否则,反向传播优化网络权重,直至模型loss函数收敛,得到分类模型;
11.s6.使未标定的待测图像的尺度划分、扇形图数量尺寸与训练的所述样本图像保持一致,将所述待测图像输入所述分类模型进行识别分类,获得分类结果。
12.本发明可以通过百度地图、高德地图、谷歌地图等现有技术快速获得建筑周边范围的卫星图像,一般截图的卫星图像为矩形,本发明基于风向选择,将样本图像处理为圆形,并将每个样本图像等分为至少8个扇形图,同一样本图像的每一个扇形图表示360度风向的一个分区,保证风向数量、满足风场模拟要求。采集的集本图像,包括不同的尺度,每一种尺度的样本图像输入卷积神经网络模型独立训练,训练后在softmax层输出结果,并在softmax层将多尺度样本图像的输出结果融合得到分类模型。
13.本发明还具有以下优选设计:
14.所述样本图像划分为10km、5km、2km三个尺度。
15.所述在softmax层对多种尺度扇形图的训练输出结果进行融合时,可采用如下较佳的权重组合,10km尺度权重系数为0.5,5km尺度的权重系数为0.3,2km尺度的权重系数为0.2。
16.本发明所述样本图像等分为8~36个扇形图,满足风场模拟要求。
17.所述esdu方法的地面粗糙度标定标签包括,
18.标签a:近海海面和海岛、海岸、湖岸及沙漠地区;
19.标签b:田野、乡村、丛林、丘陵以及房屋稀疏的乡镇和城市市郊;
20.标签c:密集建筑群且房屋较低的城市市区;
21.标签d:密集建筑群且房屋较高的城市市区。
22.本发明所述多尺度输入卷积神经网络模型为alexnet卷积神经网络,包括5个卷积层和2个全连接层,激活函数采用relu函数;softmax层的所述loss函数采用交叉熵损失函数。也可以采用其他有同等效果的网络模型进行训练。
23.与现有技术相比,本发明的有益效果是:
24.本发明通过多尺度输入卷积神经网络模型,训练的图像样本可以从卫星地图上快速截取,样本图像处理为扇形图,训练时充分考虑风向的影响,充分表达建筑周边场地地貌特征,提高了训练模型的鲁棒性,使得建筑风场地面粗糙度分类结果更精确、更可靠。采用训练好的分类模型对待测场地图像进行识别,分类效率更高,更有利于建筑风场试验模拟的开展。
附图说明
25.图1是本发明一种基于多尺度卷积神经网络的建筑风场地面粗糙度识别方法的流程图;
26.图2是本发明实施例中建筑周边卫星图像预处理的流程图;
27.图3是本发明实施例提供的多尺度输入卷积神经网络模型。
具体实施方式
28.下面结合附图和实施例,详细说明本发明的技术方案,以便本领域普通技术人员更好地理解和实施本发明的技术方案。
29.基于多尺度输入神经网络的建筑风场地面粗糙度识别方法,如图1至图3所示,主要包含构建数据集、分类模型训练和模型检验,具体包括如下步骤:
30.s1.根据建筑周边范围大小划分3个尺度,本实施例中,样本图像划分为10km、5km、2km三个尺度,采集所述建筑周边不同尺度的卫星图像获得样本图像,所述样本图像预处理为圆形,并将圆形的所述样本图像等分为36个扇形图,其中卫星图像可直接在百度地图、高德地图或谷歌地图等商业地图软件中截取,截取的图像应保证特征完整性,建议图像尺寸不小于227mm*227mm,然后将图像裁剪为圆形作为样本图像;
31.s2.采用esdu方法标定所述扇形图内区域的地面粗糙度;
32.具体地,esdu方法的地面粗糙度标定标签包括,
33.标签a:近海海面和海岛、海岸、湖岸及沙漠地区;
34.标签b:田野、乡村、丛林、丘陵以及房屋稀疏的乡镇和城市市郊;
35.标签c:密集建筑群且房屋较低的城市市区;
36.标签d:密集建筑群且房屋较高的城市市区;
37.s3.构建多尺度输入卷积神经网络模型,采用相互独立的卷积神经网络分别训练输入的每种尺度的扇形图,至softmax层输出结果;
38.s4.在softmax层对多种尺度扇形图的训练输出结果进行融合,融合时根据尺度分配权重,加权计算后得到最终的分类结果,根据所述分类结果及所述esdu方法的地面粗糙度标定标签计算loss函数,
39.本实例中采用如下较佳的权重组合,10km尺度权重系数为0.5,5km尺度的权重系数为0.3,2km尺度的权重系数为0.2;
40.s5.对比所述loss函数值收敛误差,当误差小于0.5%,则模型训练完成,得到分类模型;否则,反向传播优化网络权重,直至模型loss函数收敛,得到分类模型;
41.本实施例中,如图3所示,多尺度输入卷积神经网络模型为alexnet卷积神经网络,包括5个卷积层和2个全连接层,激活函数采用relu函数;softmax层的所述loss函数采用交叉熵损失函数,relu函数即线性整流函数(rectified linear unit),又称修正线性单元,是一种人工神经网络中常用的激活函数,具体表达式如下:
42.relu(x)=max(0,x),其中
43.交叉熵损失函数表达如下:
[0044][0045]
其中,n为样本数量,m为类别的数量,取4;y
ic
为符号函数,如果样本i的真实类别等于c取1,否则取0;为网络输出分布,即观测样本i属于类别c的预测概率,
[0046]
在其他实施例中,也可采用其他有同等效果的网络模型进行训练;
[0047]
s6.使未标定的待测图像的尺度划分、扇形图数量尺寸与训练的所述样本图像保持一致,将所述待测图像输入所述分类模型进行识别分类,获得分类结果。
[0048]
采用本发明实施例提供的技术方案,通过多尺度输入卷积神经网络模型,能够充分表达建筑周边场地地貌特征,提高训练模型的鲁棒性,使得建筑风场地面粗糙度分类结果更精确、更可靠,分类准确率可达91%。采用训练好的分类模型对待测场地图像进行识别,分类效率更高,更有利于建筑风场试验模拟的开展。
[0049]
在其他实施例中,建筑周边范围大小也可划分2个尺度或3个以上的尺度,样本图像可以预处理为满足风场模拟要求且等分的8~36个扇形图。也可以采用其他与alexnet卷积神经网络同等效果的网络模型进行训练得到分类模型。
[0050]
上述实施例仅是本发明较优实施例,但并不能作为对发明的限制,任何基于本发明构思基础上作出的变型和改进,均应落入到本发明保护范围之内,具体保护范围以权利要求书记载为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。