1.本发明涉及一种用于垃圾分类的无人车视觉识别方法。
背景技术:
2.现如今,随着垃圾分类的普遍推广,为了节省人工成本,智能垃圾分类识别系统的研究是非常重要。
3.目前有的智能垃圾分类系统大多都需要由人工提前进行分类,通过袋子上的二维码等将垃圾自动收入对应的垃圾桶内。但是像一些公共场所可能会出现个别零散的垃圾,就需要带有智能垃圾分类识别系统的无人车,它能对垃圾进行识别,再进行对应的处理。因为同一垃圾可能有不同的形状,或是在采集垃圾图像时出现由于环境等因素出现了不清晰、有遮挡的情况,普通的物体识别系统的识别能力比较有限。
技术实现要素:
4.本发明的目的在于提供一种用于垃圾分类的无人车视觉识别方法。
5.为解决上述问题,本发明提供一种用于垃圾分类的无人车视觉识别方法,包括:
6.采用小波变换融合图像融合算法,对不清晰的垃圾图像数据进行处理和融合,以得到融合后的垃圾图像;
7.基于融合后的垃圾图像,确定对应的垃圾类别。
8.进一步的,在上述方法中,采用小波变换融合图像融合算法,对不清晰的垃圾图像数据进行处理和融合,以得到融合后的垃圾图像,包括:
9.把不清晰的垃圾图像,按照预设的规则分解成若干个小图像,而后将每一个小图像放置于对应的位置上进行融合,待所有的内容完成融合后,最后做一次小波逆变换,得到最终融合后的垃圾图像。
10.进一步的,在上述方法中,所述小波逆变换为离散小波变换。
11.进一步的,在上述方法中,所述离散小波变换的过程如下:
12.将信号x[n]通过具有脉冲响应h[n]的半带低通滤波器;
[0013]
根据奈奎斯特定理进行下采样,间隔一个剔除样本点,信号留下一半样本点,尺度翻倍。
[0014]
进一步的,在上述方法中,对不清晰的垃圾图像数据进行处理和融合中,包括:使用系数绝对值较大法和加权平均法两种融合规则,对不清晰的垃圾图像数据进行处理和融合。
[0015]
进一步的,在上述方法中,采用小波变换融合图像融合算法,对不清晰的垃圾图像数据进行处理和融合,以得到融合后的垃圾图像,包括:
[0016]
在python的gui功能库tkinder编写了一个具有小波变换融合图像融合算法的用于垃圾分类的无人车视觉识别系统,利用无人车视觉识别系统对不清晰的图像数据进行处理和融合,以得到融合后的垃圾图像。
[0017]
与现有技术相比,本发明可以用于垃圾分类的无人车视觉识别系统,目前的智能垃圾分类系统大多都需要由人工提前进行分类打包,但零散的垃圾如此处理会浪费人工成本。带有智能垃圾分类识别系统的无人车能对个别垃圾进行识别并处理。但是,采集图像时可能会出现了不清晰、有遮挡的情况,故而图像的质量对机器识别的准确度有很大的影响。本发明利用简单的图像处理和图像融合技术解决低质量垃圾图像严重影响识别准确度的问题,遮挡、光线等多种因素都可能会影响获取图像的重要特征,造成机器识别效率低下。利用python中的tkinder库制作了一个用于垃圾分类的无人车视觉识别系统,给出了算法的数学原理、融合步骤和主要程序。
附图说明
[0018]
图1是本发明一实施例的小波变换融合的示意图;
[0019]
图2是本发明一实施例的用于垃圾分类的无人车视觉识别系统界面设计布局的示意图;
[0020]
图3是本发明一实施例的用于垃圾分类的无人车视觉识别系统运行示意图;
[0021]
图4是本发明一实施例的单张图像选择示意图;
[0022]
图5是本发明一实施例的完成单张图像选择后的示意图;
[0023]
图6是本发明一实施例的完成两张不清晰图像选择后的示意图;
[0024]
图7是本发明一实施例的小波变换融合后的系统界面示意图。
具体实施方式
[0025]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0026]
如图1所示,本发明提供一种用于垃圾分类的无人车视觉识别方法,包括:
[0027]
步骤s1,采用小波变换融合图像融合算法,对不清晰的垃圾图像数据进行处理和融合,以得到融合后的垃圾图像;
[0028]
步骤s2,基于融合后的垃圾图像,确定对应的垃圾类别。
[0029]
本发明得到用于垃圾分类的无人车视觉识别方法一实施例中,步骤s1,采用小波变换融合图像融合算法,对不清晰的垃圾图像数据进行处理和融合,以得到融合后的垃圾图像,包括:
[0030]
把不清晰的垃圾图像,按照预设的规则分解成若干个小图像,而后将每一个小图像放置于对应的位置上进行融合,待所有的内容完成融合后,最后做一次小波逆变换,得到最终融合后的垃圾图像。
[0031]
在此,小波变换融合的思路是会分别把清晰和不清晰的垃圾图像,按照预设的规则分解成若干个小图像,而后将每一个小图像放置于对应的位置上进行融合,待所有的内容完成融合后,最后做一次小波逆变换,就能得到最终融合后的垃圾图像。
[0032]
小波变换的数学公式(4.3)如下:
[0033][0034]
[0035]
公式中,a为尺度,τ为平移量。尺度和平移量分别决定的是函数的伸缩与平移,分别对应于频率(反比)和时间。
[0036]
小波变换的固有特性使其在图像处理中有如下优点:小波变换能够保证在分解图像的过程中没有信息损失和冗余信息,保持了信息的完整性,具有完善的重构能力;它把原图像分解成低频图像和高频图像的组合,分别代表了图像的不同结构,故而容易提取原始图像的结构信息和细节信息;同时它还提供了与人类视觉系统方向相吻合的选择性图像。
[0037]
本发明得到用于垃圾分类的无人车视觉识别方法一实施例中,所述小波逆变换为离散小波变换。
[0038]
在此,图像融合的小波分解一般采用离散小波变换(discrete wavelet transform,dwt)。dwt的函数基由一个称为母小波或分析小波的单一函数通过膨胀和平移获得。dwt用小波函数和尺度函数来分别分析高频信号和低频信号,也即高通滤波器和低通滤波器。
[0039]
dwt融合算法基本思想:首先对源图像进行小波变换,然后按照一定规则对变换系数进行合并;最后对合并后的系数进行小波逆变换得到融合图像。
[0040]
dwt分解过程如下:
[0041]
(1)将信号x[n]通过具有脉冲响应h[n]的半带低通滤波器,这一过程类似数学里的卷积:
[0042][0043]
这一操作会剔除信号中频率低于p/2的部分(信号最高频率为p),信号分辨率下降一半。
[0044]
(2)根据奈奎斯特定理进行下采样,间隔一个剔除样本点,信号留下一半样本点,尺度翻倍。将这一半进行高通滤波(滤波不影响信号的尺度):
[0045][0046]
这是第一个level的分解,如果要进行进一步分解,就把高通滤波器的结果再次一分为二,进行高通滤波和低通滤波,各自的公式为
[0047][0048][0049]
由此可知,分解的level数为不超过信号长度的2的n次幂,保留了频率的时间位置信息。
[0050]
dwt同时具有时域和频域分析能力,与金字塔分解相比,dwt图像分解具有以下优势:
[0051]
1)具有方向性,在提取图像低频信息的同时,还可获得了水平、垂直和对角三个方向的高频信息;
[0052]
2)通过合理的选择母小波,可使dwt在压缩噪声的同时更有效的提取纹理、边缘等显著信息;
[0053]
3)金字塔分解各尺度之间具有信息的相关性,而dwt在不同尺度上具有更高的独
立性。
[0054]
小波变换的缺点:仅仅是简单的用全色影像的高频信息替换多光谱数据的高频分量,这样导致了多光谱数据的高频纹理信息丢失;且多光谱数据的低频信息与全色影像的低频分量光谱差异较大,直接替换会有很大误差;随着分解层数的增加,融合的图像容易产生斑块现象。
[0055]
图像融合过程主要是:先将原图像分解为低频图像和高频图像,再继续分别分解。在每一分解层上,图像均被分解为ll,lh,hh和hl四个频带(ll:水平低频,垂直低频;lh:水平低频,垂直高频;hl:水平高频,垂直低频;hh:水平高频,垂直高频),下一层的分解仅对ll进行分解。这四个子图像中的每一个都是由原图与一个小波基函数的内积后,再经过在x和y方向都进行2倍的间隔采样而生成的,这是就小波变换,即图像的分解;小波逆变换,即是图像的重建,是通过图像的增频采样和卷积来实现的。
[0056]
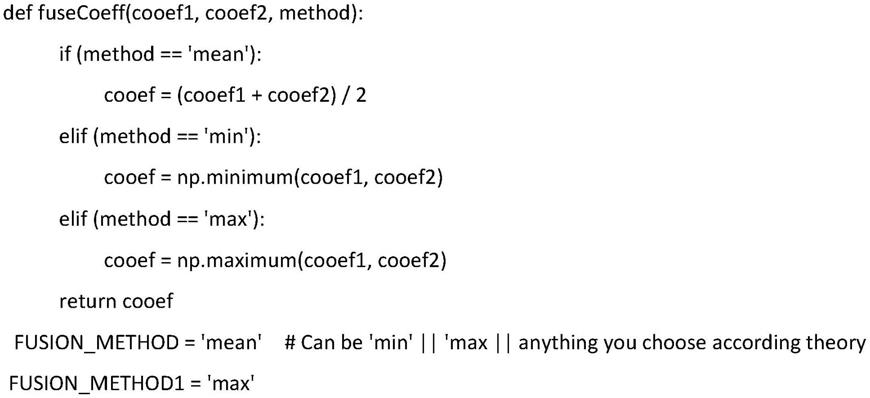
2、主要代码:
[0057][0058]
两种融合规则分别是系数绝对值较大法、加权平均法,前者适合高频成分比较丰富,亮度、对比度比较高的源图像,小波变换将信号的全部信息集中到一部分具有大幅值的小波系数中。这些大的小波系数含有的能量远比小系数含有的能量大。后者权重系数可调,适用范围广,且可消除部分噪声,源图像信息损失较少,但会造成图像对比度的下降,需要增强图像灰度。
[0059][0060]
这一步是对图像进行小波分解,得到若干图像。
[0061][0062]
这是根据上述两种规则中的一种对分解后的图像数据进行算法融合。
[0063][0064][0065]
融合后进行小波逆变换得到最终的融合图像。
[0066]
本发明最主要的研究内容便是利用图像融合技术解决采集垃圾图像出现遮挡和不清晰的问题,避免由于提供给计算机的数据所剩无几或光照、物体遮挡等因素影响获取图像特征的场景下,造成机器视觉的执行效率较低的问题。
[0067]
本发明的用于垃圾分类的无人车视觉识别方法一实施例中,对不清晰的垃圾图像数据进行处理和融合中,包括:使用系数绝对值较大法和加权平均法两种融合规则,对不清晰的垃圾图像数据进行处理和融合。
[0068]
在此,对于分解层数和融合规则的选择非常重要,会影响最终图像融合的效果,使用系数绝对值较大法和加权平均法两种融合规则能基本满足大部分的图像处理要求,能消除部分噪声,且运算简单快速,操作轻松。
[0069]
详细的:
[0070]
一、在python的gui功能库tkinder编写了一个具有小波变换融合图像融合算法的用于垃圾分类的无人车视觉识别系统,利用这个系统对几组清晰和不清晰的图像数据进行处理和融合。
[0071]
二、用于垃圾分类的无人车视觉识别系统界面设计
[0072]
在python中,按照设计绘制出文本框、按钮、标签等必要组件,调整大小、位置、颜色和布局,并且完成各组件属性的修改。最后的结果图如图2所示。
[0073]
五、用于垃圾分类的无人车视觉识别系统界面调试
[0074]
系统运行后如图3所示。
[0075]
单张图像选择时图像界面如图4所示。
[0076]
完成图像选择后系统界面如图5所示。
[0077]
两张不清晰原图像选择后系统界面如图6所示。
[0078]
此时单击菜小波变换图像融合的按钮,得到融合后系统界面如图7所示:
[0079]
六、用于垃圾分类的无人车视觉识别系统程序设计如下:
[0080][0081]
[0082]
[0083][0084]
七、小波变换融合主要代码
[0085]
小波变换融合的思路是会把原图像按照一定的规则分解成若干个小图像,而后将每一个小图像放置于对应的位置上进行融合,待所有的内容完成融合后,最后做一次逆小波变换,就能得到最终融合的结果。图像融合的小波分解一般采用离散小波变换(discrete wavelet transform,dwt)。dwt融合算法基本思想:首先对源图像进行小波变换,然后按照一定规则对变换系数进行合并;最后对合并后的系数进行小波逆变换得到融合图像。dwt的函数基由一个称为母小波或分析小波的单一函数通过膨胀和平移获得。
[0086]
[0087][0088]
本发明可以用于垃圾分类的无人车视觉识别系统,目前的智能垃圾分类系统大多都需要由人工提前进行分类打包,但零散的垃圾如此处理会浪费人工成本。带有智能垃圾分类识别系统的无人车能对个别垃圾进行识别并处理。但是,采集图像时可能会出现了不清晰、有遮挡的情况,故而图像的质量对机器识别的准确度有很大的影响。本发明利用简单的图像处理和图像融合技术解决低质量垃圾图像严重影响识别准确度的问题,遮挡、光线等多种因素都可能会影响获取图像的重要特征,造成机器识别效率低下。利用python中的tkinder库制作了一个用于垃圾分类的无人车视觉识别系统,给出了算法的数学原理、融合步骤和主要程序。
[0089]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0090]
专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0091]
显然,本领域的技术人员可以对发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。