1.本发明专利属于烟叶收割技术领域,尤其涉及一种烟叶机械化采摘控制方法。
背景技术:
2.在烟叶生产过程中,采摘是基础性的工作,烟叶的采摘时期和采摘方法关系到烟叶产量和烟叶质量,所以科学及时地采摘烟叶是保证烟叶品质的关键。采摘烟叶时我国绝大多数烟农还是手工采摘,不仅需要消耗大量的劳动力和时间,并且采摘效率低,很难保证及时采摘。目前国内也有一些半机械化和机械化的烟叶采摘机投入使用,同时在烟叶收割机内加装烟叶采摘刀具,采摘刀具在使用时多为电气控制,采用电气控制虽然也能做到采收的速度控制,但其很难做到灵活和精细的控制,并且智能程度和人性化设计都跟不上现在农业机械的市场需求;因此开发出一种具有操作方便、自动化程度高、节省人力、节省成本的烟叶机械化采摘控制方法具有重要的应用意义。
3.发明专利内容本发明专利的目的在于提供一种烟叶机械化采摘控制方法,以解决现有的烟叶采摘机在采摘烟叶时费时、费力的现象、而且通过电气控制虽然也能做到采收的速度控制,但其很难做到灵活和精细的控制;因此开发出一种操作方便、自动化程度高、节省人力、节省成本的烟叶机械化采摘控制方法具有重要的应用意义。
4.为实现上述目的,本发明专利提供的技术方案是:一种烟叶机械化采摘控制方法,首先将烟叶采摘机初始化,随后智能控制系统检测烟叶采摘机状态并判断烟叶采摘机状态;其次在采摘前通过行车控制手柄设置采收刀时的作业速度,同时核心处理芯片会输出一个和作业刀速度相匹配的烟叶采摘机行驶速度s2,s1为烟叶采摘机的实际速度,当s1小于s2时候调整烟叶采摘机行驶速度,以提高采收的速度,也可不调节,采收时速度低一些;当s1大于s2,须调整烟叶采摘机行驶速度,降低烟叶采摘机行驶速度,已达到车速和刀速的匹配。
5.进一步地,智能控制系统包括语音报警模块、人机交互模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器及核心处理芯片,所述的语音报警模块、人机交互模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器分别与核心处理芯片连接。
6.进一步地,语音报警模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器分别与人机交互模块连接进一步地,人机交互模块设置的人机交互界面能够对各部件的速度进行设置,设置的数据会传送至核心处理芯片上并被保存起来,在后续使用时不需要再进行设置。
7.进一步地,各传感器检测到的数据在人机交互界面上显示,当检测的数据达到或超过警戒值时,人机交互界面显示,同时会报警器会进行报警。
8.进一步地,核心处理芯片主要为国产的gd32的嵌入式芯片。
9.进一步地,车辆在转场时由行车控制手柄控制车辆行走,行走速度不会受到其他
运动部件的影响和限制。
10.进一步地,车辆在作业时,需要采收部件的运行速度和车辆行驶的速度相匹配,核心处理芯片设置车辆速度和采收部件的速度,车辆行驶的速度快,那么相应的采收部件的运行速度也会增加,但在采收部件的速度达到一定的速度后,采收部件的速度会限制车辆行驶;有益效果:核心处理芯片通过检测行车控制手柄的信号来控制车辆的前进、倒退以及车辆行走的速度;核心处理芯片可控制烟叶采收部件的运行速度、液压系统的散热、检测车辆行走速度、检测采收部件运行速度(采收刀,采收辊,传送带,风机)、检测液压系统的状态、检测液压系统的温度、检测发动机的温度、检测发动机的油量检测车辆电池电量、检测到的数据会在人机交互界面上进行显示、如果检测到的数据达到或超过预警值,会在界面上报警,同事单独的报警模块会进行报警;本控制系统能够提高设备的灵活控制,精细控制以及很好的人性化控制,对于农机手来说更容易使用,并且不用过多的去了解采收设备的速度要求,只要根据实际的需求输入就能够达到很好的采收效果;烟叶采摘机,包括:烟叶采摘机本体,所述的烟叶采摘机本体包括烟叶收集框体、发动机总成机构、二层架机构总成、机架总成、切刀总成、烟叶采摘输送总成、烟叶传送总成、风机吹送系统、前轮、后轮及智能控制系统,所述的机架总成位于烟叶采摘机本体中上部,二层架机构总成前端部前横梁固定在机架总成前端部上端,二层架机构总成后端部后横梁固定在机架总成中后部上端且距离机架总成后端部1/3机架总成纵向长度,所述的烟叶传送总成前端底部外侧壁固定在二层架机构总成传送悬挂架底部固定片上,烟叶传送总成后端部固定机构底部固定在机架总成后端部并通过螺栓与机架总成固定连接,所述的烟叶收集框体位于烟叶传送总成后端并通过固定滑件与机架总成后端部设置的滑轨总成配合连接,所述的烟叶收集框体与滑轨总成连接处设置有翻转油缸,所述的烟叶采摘输送总成前竖梁固定在机架总成左、右纵梁前端部上端及二层架机构总成前端部横梁内侧壁,烟叶采摘输送总成后竖梁固定在机架总成左、右纵梁后端部上端及二层架机构总成后端部横梁内侧壁,所述的发动机总成机构底部固定在机架总成前半部中横梁上端;有益效果:本发明专利通过设置通过设置烟叶传送总成,烟叶传送总成设置有水平传送架、提升输送架、传送带涨紧架及风机总成,水平输送架通过将设置的连接板固定在提升输送架左固定板、右固定板底部外壁上实现水平输送架与提升输送架的固定连接,水平输送架、提升输送架之间的夹角为130
°
,风机吹送系统设置的固定件与提升输送架设置的支撑板横侧壁竖侧壁之间螺栓连接实现风机吹送系统与提升输送架的固定连接,风机吹送系统位于提升输送架顶端,传送带涨紧架顶部位于支撑板中下部并与支撑板之间轴承连接,传送带涨紧架底部悬空,传送带涨紧架可进行0
°‑
90
°
之间的翻转,烟叶采摘机本体在运行过程中由发动机总成机构带动切刀总成转动切下烟叶,烟叶传送总成设置的水平输送架与提升输送架交接处时由于提升输送架外端设置有导流板,导流板与提升输送架形成封闭式结构,风机吹送系统运行过程中会在风机吹送系统与提升输送架交接处形成负压,位于水平输送架与提升输送架交接处的烟叶会在压力的作用下运行至风机吹送系统处并由风机吹送系统吹送至烟叶收集框体内,另外在提升输送架上设置有传送带本体,传送带本体上设置有多个钩状结构,钩状结构也可对烟叶进行固定防止向上输送的烟叶掉落,运送至风机处烟叶在风力的作用下脱离钩状结构进入烟叶收集框,整个烟叶采摘机本体在运行过
程中,完全自动运行由各部件配合将切割下的烟叶输送至下一工序,达到节省人力、物力、省时的优点。
11.进一步地,机架总成前端中部下端设置有前轮转向装置,前轮转向装置下端设置有前轮,所述的前轮转向装置上端连接有转向件,转向件包括有转向油缸及转向固定件;总的来讲:本发明专利具有操作方便、自动化程度高、节省人力、节省成本的优点。
附图说明
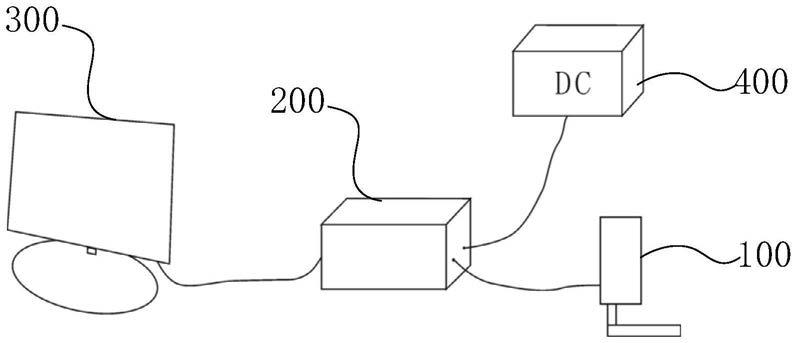
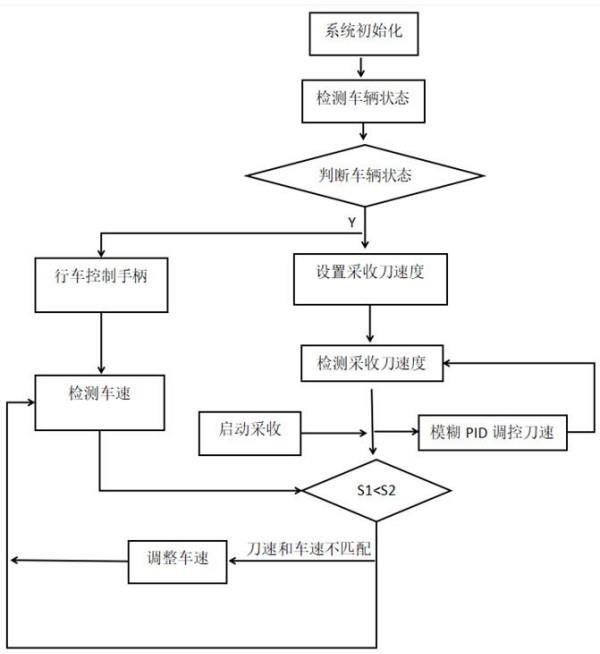
12.图1为本发明专利一种烟叶机械化采摘控制方法的流程示意图;图2为本发明专利核心控制器与其它部件连接的结构示意图;图3本发明专利烟叶采摘机本体的立体结构示意图。
13.附图标记:0、烟叶采摘机本体
ꢀꢀ
1、烟叶收集框体
ꢀꢀ
2、发动机总成机构
ꢀꢀ
3、二层架机构总成
ꢀꢀ
4、机架总成
ꢀꢀ
5、切刀总成
ꢀꢀ
6、烟叶采摘输送总成
ꢀꢀ
7、烟叶传送总成
ꢀꢀ
8、风机吹送系统
ꢀꢀ
9、前轮
ꢀꢀ
90、前轮转向装置
ꢀꢀ
91、转向件
ꢀꢀ
10、后轮。
具体实施方式
14.下面结合附图对本发明专利的实施方式作进一步说明。
15.本发明专利的具体实施例,如图1所示一种烟叶机械化采摘控制方法,首先将烟叶采摘机初始化,随后检测烟叶采摘机状态并判断车辆状态;其次在采收前通过行车控制手柄设置采收刀时的作业速度,同时核心处理芯片会输出一个和作业刀速度相匹配的车辆行驶速度s2,s1为车辆的实际速度,当s1小于s2时候调整烟叶采摘机行驶速度,以提高采收的速度,也可不调节,采收时速度低一些;当s1大于s2,须调整车辆行驶速度,降低烟叶采摘机行驶速度,已达到车速和刀速的匹配。
16.如图2所示,智能控制系统包括语音报警模块、人机交互模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器及核心处理芯片,所述的语音报警模块、人机交互模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器分别与核心处理芯片连接;车辆行走控制功能,通过检测行车控制手柄的信号来控制车辆的前进、倒退以及车辆行走的速度;如图2所示,核心处理芯片可控制烟叶采收部件的运行速度、控制液压系统的散热;通过与车速检测模块连接可检测车辆行走速度;通过采收速度检测模块可检测采收部件运行速度(采收刀,采收辊,传送带,风机);通过液压检测模块可检测检测液压系统的状态及检测液压系统的温度;通过车辆状态检测传感器可检测发动机的温度、发动机的油量、车辆电池电量;检测到的数据会在人机交互界面上进行显示。
17.语音报警模块、北斗定位模块、行车控制手柄、行车速度驱动器、车速检测模块、采收模块驱动器、车辆状态检测传感器分别与人机交互模块连接,人机交互模块可接收各模块、各传感器反馈信息,并通过人机交互模块控制各模块动作。
18.人机交互模块设置的人机交互界面能够对各部件的速度进行设置,设置的数据会传送至核心处理芯片上并被保存起来,在后续使用时不需要再进行设置。
19.各传感器检测到的数据在人机交互界面上显示,当检测的数据达到或超过警戒值
时,会将检测到的数据反馈至核心处理芯片,核心处理芯片将接收到的预警信息传输至人机交互界面显示,同时会报警器会进行报警。
20.核心处理芯片主要为国产的gd32的嵌入式芯片。
21.车辆在转场时由行车控制手柄控制车辆行走,行走速度不会受到其他运动部件的影响和限制。
22.车辆在作业时,核心处理芯片已设定好程序即需要采收部件的运行速度和车辆行驶的速度相匹配,车辆速度和采收部件的速度相互制约,车辆行驶的速度快,那么相应的采收部件的运行速度也会增加,但在采收部件的速度达到一定的速度后,采收部件的速度会限制车辆行驶;核心处理芯片通过检测行车控制手柄的信号来控制车辆的前进、倒退以及车辆行走的速度;核心处理芯片可控制烟叶采收部件的运行速度、液压系统的散热、检测车辆行走速度、检测采收部件运行速度(采收刀,采收辊,传送带,风机)、检测液压系统的状态、检测液压系统的温度、检测发动机的温度、检测发动机的油量检测车辆电池电量、检测到的数据会在人机交互界面上进行显示、如果检测到的数据达到或超过预警值,会在界面上报警,同时单独的报警模块会进行报警;本控制系统能够提高设备的灵活控制,精细控制以及很好的人性化控制,对于农机手来说更容易使用,并且不用过多的去了解采收设备的速度要求,只要根据实际的需求输入就能够达到很好的采收效果;如图3所示,烟叶采摘机,包括:烟叶采摘机本体0,所述的烟叶采摘机本体0包括烟叶收集框体1、发动机总成机构2、二层架机构总成3、机架总成4、切刀总成5、烟叶采摘输送总成6、烟叶传送总成7、风机吹送系统8、前轮9、后轮10及智能控制系统,其特征在于:所述的机架总成4位于烟叶采摘机本体0中上部,二层架机构总成3前端部前横梁固定在机架总成4前端部上端,二层架机构总成3后端部后横梁固定在机架总成4中后部上端且距离机架总成4后端部1/3机架总成4纵向长度,所述的烟叶传送总成7前端底部外侧壁固定在二层架机构总成3传送悬挂架底部固定片上,烟叶传送总成7后端部固定机构底部固定在机架总成4后端部并通过螺栓与机架总成4固定连接,所述的烟叶收集框体1位于烟叶传送总成7后端并通过固定滑件11与机架总成后端部设置的滑轨总成配合连接,所述的烟叶收集框体1与滑轨总成连接处设置有翻转油缸,所述的烟叶采摘输送总成6前竖梁固定在机架总成4左、右纵梁前端部上端及二层架机构总成前端部横梁内侧壁,烟叶采摘输送总成6后竖梁固定在机架总成4左、右纵梁后端部上端及二层架机构总成后端部横梁内侧壁,所述的发动机总成机构2底部固定在机架总成4前半部中横梁上端;通过设置烟叶传送总成7设置有水平传送架、提升输送架、传送带涨紧架及风机总成,水平输送架通过将设置的连接板固定在提升输送架左固定板、右固定板底部外壁上实现水平输送架与提升输送架的固定连接,水平输送架、提升输送架之间的夹角为130
°
,风机吹送系统8设置的固定件与提升输送架设置的支撑板横侧壁竖侧壁之间螺栓连接实现风机吹送系统8与提升输送架的固定连接,风机吹送系统8位于提升输送架顶端,传送带涨紧架顶部位于支撑板中下部并与支撑板之间轴承连接,传送带涨紧架底部悬空,传送带涨紧架可进行0
°‑
90
°
之间的翻转,烟叶采摘机本体0在运行过程中由发动机总成机构带动切刀总成5转动切下烟叶,烟叶传送总成7设置的水平输送架与提升输送架交接处时由于提升输送架外端设置有导流板,导流板与提升输送架形成封闭式结构,风机吹送系统8运行过程中会
在风机吹送系统8与提升输送架交接处形成负压,位于水平输送架与提升输送架交接处的烟叶会在压力的作用下运行至风机吹送系统8处并由风机吹送系统8吹送至烟叶收集框体1内,另外在提升输送架上设置有传送带本体,传送带本体上设置有多个钩状结构,钩状结构也可对烟叶进行固定防止向上输送的烟叶掉落,运送至风机处烟叶在风力的作用下脱离钩状结构进入烟叶收集框,整个烟叶采摘机本体0在运行过程中,完全自动运行由各部件配合将切割下的烟叶输送至下一工序,达到节省人力、物力、省时的优点。
23.所示机架总成4前端中部下端设置有前轮转向装置,前轮转向装置下端设置有前轮9,所述的前轮转向装置上端连接有转向件,转向件包括有转向油缸及转向固定件;总的来讲:本发明专利具有结构简单、操作方便、自动化程度高、节省人力、节省成本的优点。
24.最后说明的是,以上实施例仅用以说明本发明专利的技术方案而非限制,尽管参照佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明专利的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。