1.本发明涉及农业机械领域,特别涉及一种麦田分蘖期级联式锄草设备及作业控制方法。
背景技术:
2.杂草治理一直以来都是农业生产中的重要任务,在小麦分蘖期时由于作物植株较小,散布于麦田行间杂草能够对小麦的生长造成极大的干扰,因此,对分蘖期麦田进行杂草治理显得尤为重要。
3.当前针对麦田分蘖时期主要通过喷施化学药品方式去除杂草,研究显示,这种除草方式已造成杂草抗药性增强、环境污染等问题,且化学药品可能发生飘移现象附着于小麦植株上,也造成了作物减产及潜在的粮食安全问题。机械锄草作业是旱作农业可持续发展的一项关键性生产技术,能够杀除已出土的杂草或将草籽深埋。目前常用的大型锄草农机能够搭载多个锄草装置,锄草作业速度快,但我国耕地以小田块为主,大型农机较难推广,且受限于条播麦田小行距、无株距的生长特征,在作业中行走轮极易压伤小麦植株,对作物伤害极大;而小型锄草设备大多只搭载单个锄草装置,作业中每次只能覆盖单个作物行,锄草效率低,极少能够搭载多个锄草装置的小型锄草设备不考虑作物长势,无法调节各锄草刀具间的相对位置,也造成了锄草作业中不可避免的损伤作物叶片现象产生。在锄草控制方法上,目前的锄草设备主要采用定转速的方式锄草作业,但由于田间土壤干扰因素较多,导致锄草时所需克服的工作阻力也不相同,当阻力值大于电机最大负载值时,会产生电机降速现象,甚至导致电机怠工,造成杂草漏锄、锄草设备不可靠等问题,因此,还需要寻求一种考虑麦田中实际阻力情况的锄草控制方法。
技术实现要素:
4.本发明的目的在于提供一种麦田分蘖期级联式锄草设备,能够根据小麦田块大小级联不同数量锄草装置,以在单次作业中同时覆盖多个作物行,提高锄草效率,且所级联的锄草装置能够针对不同长势麦田迅速调节作业行距,降低锄草作业中的伤苗率;同时还提供一种作业控制方法,能够根据麦田实际阻力情况实时调节转速,提高锄草率及锄草设备作业时的可靠性。
5.为实现上述目的,本发明采取的技术方案如下:
6.一方面,本发明提供了一种麦田分蘖期级联式锄草设备,其包括手推车架、锄草装置、作业间距调节装置、作业高度调节装置、控制装置;
7.所述手推车架的前端固定安装在横梁上,后端作为操作扶手;
8.所述锄草装置设置在横梁下方,其通过锄草器在麦田土壤下方的一定深度下高速转动实现锄草功能;
9.所述作业间距调节装置设置于锄草装置上方,用于对所级联的锄草装置能够针对不同品种及长势的分蘖期小麦植株调节作业间距,降低伤苗率;
10.所述作业高度调节装置包括微调机构和作业深度调节机构,微调机构用于当锄草设备搭载不同半径的滚刀锄草器时进行高度微调,保持各滚刀锄草器入土深度一致,作业深度调节机构用于调节整体锄草装置进行锄草作业时的入土深度;
11.所述控制装置用于根据输入的压实度信息采用pid控制调节滚刀锄草器转动速度。
12.进一步的,所述锄草装置采用单元形式,各个锄草单元并列设置,根据小麦田块尺寸自主选择级联的单元数量。
13.更进一步的,单个锄草单元包括滚刀锄草器、法兰盘、驱动电机、传动链条、链条张紧器,其中,所述滚刀锄草器两侧通过螺栓连接的方式固定有法兰盘,法兰盘中部设有方孔,其与链轮通过方轴嵌套连接,驱动电机通过传动链条和链轮带动滚刀锄草器高速转动,实现锄草功能。
14.更进一步的,所述方轴的一侧末端安装有编码器,负责反馈锄草装置真实转速。
15.进一步的,所述作业间距调节装置包括弹簧定位销、导轨、滑块,其中,所述弹簧定位销通过螺栓连接于背板上,弹簧定位销与设置在横梁上的定位孔配合,实现定位锁死;所述背板安装在动板上,动板与滑块相连,滑块滚轮部分嵌套于导轨上,拔起弹簧定位销,横向移动滑块在导轨上位置,即可实现调节锄草装置间距。
16.更进一步的,所述作业高度调节装置中,微调机构包括设置于动板上的微调定位孔,该微调定位孔与背板上的背板定位孔相配合实现背板高度的微调;作业深度调节机构通过调节行走轮的高度实现,所述行走轮安装在l型支撑板的下方,l型支撑板上设置有高度调节孔,其与动板上的固定孔相配合实现行走轮与横梁之间高度的调节。
17.更进一步的,所述背板的正面两侧上固定安装有两块从动板,两块从动板的底部之间安装滚刀锄草器,且从动板与滚刀锄草器之间设置有挡圈。
18.进一步的,所述手推车架上安装有调速旋钮、转速显示器和启停开关,所述调速旋钮用于对锄草装置手动进行转速调节,所述转速显示器设置于调速旋钮一侧,在锄草作业中显示实时转速,所述启停开关设置于手推车架的扶手下方,用于控制整体设备动力供给。
19.进一步的,所述手推车架的两个扶手之间固定安装有动力装置安装板。
20.另一方面,本发明还提供了一种麦田分蘖期级联式锄草设备的作业控制方法,其包括如下步骤:
21.(1)通过土壤压实度仪对麦田作物行间压实度信息以1m为间距进行采集统计;
22.(2)将田间压实度信息传输到上位控制单元中,上位控制单元根据锄草装置动力学模型得出田间实际土壤阻力情况匹配转速,并将转速信息发送至控制装置;所述动力学模型为:
[0023][0024]
其中,n—电机转速,r/min;i—电机减速比;
[0025]
p—电机功率,kw;r—滚刀锄草器半径,m;
[0026]rl
—探针圆锥半径,m;l—探针圆锥母线长度,m;
[0027]
ci—土壤压实度,pa。
[0028]
(3)所述控制装置采用pid控制方法对上位控制单元输入信号进行处理,确保快速
准确调节不同转速,进而提高锄草作业中的可靠性与锄草率。
[0029]
本发明的有益效果是:
[0030]
(1)所设计锄草装置,作业幅面宽,能够实现对小麦行间区域全覆盖,且所扰动土壤呈现“下窄上宽”的特征,保护两侧小麦作物根系,降低锄草中的伤苗率;能够根据小麦田块大小自主选择锄草装置级联数量,提高锄草效率。
[0031]
(2)所设计作业间距调节装置,级联的锄草装置能够针对能够针对不同品种及长势的分蘖期小麦植株快速、便捷调节作业间距,且能够在条播小麦作物行偏斜时,实时将锄草装置对齐作业区域,而不用调节锄草设备在田间横向位置,提高锄草效率。
[0032]
(3)通过设置作业高度调节装置,保证在采用不同半径滚刀锄草器时,或在起伏不平的实际田间情况下锄草装置能位于土下一定深度,确保锄草功能实现。
[0033]
(4)提出的锄草设备的作业控制方法,该方法通过土壤压实度信息计算麦田中实际阻力值,建立动力学方程实时控制驱动电机转速,提高锄草率及锄草设备作业时的可靠性。
附图说明
[0034]
为了更清楚的说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,下面的附图仅展示本发明的一些实例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0035]
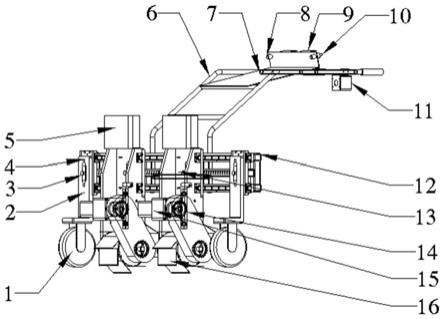
图1为本麦田分蘖期级联式锄草设备的结构示意图;
[0036]
图2为本麦田分蘖期级联式锄草设备锄草装置的结构示意图;
[0037]
图3为本麦田分蘖期级联式锄草设备作业间距调节装置的结构示意图;
[0038]
图4为本麦田分蘖期级联式锄草设备高度微调机构结构示意图;
[0039]
图5为本麦田分蘖期级联式锄草设备作业控制方法流程图;
[0040]
附图标记说明:1、行走轮;2、l型支撑板;3、第一弹簧定位销;4、高度定位螺栓;5、控制装置;6、手推车架;7、动力装置安装板;8、调速旋钮张紧螺栓;9、转速显示器;10、调速旋钮;11、启停开关;12、横梁;13、背板;14、传动链条;15、驱动电机;16、滚刀锄草器;17、法兰盘;18、方轴;19、编码器;20、挡圈;21从动板;22、链条张紧器;23、滑块;24、动板;25、导轨;26、第二弹簧定位销;27、微调定位孔;28、背板定位孔。
具体实施方式
[0041]
下面结合附图和具体实施例对本发明进行详细说明。
[0042]
实施例一。
[0043]
如图1-4,一种麦田分蘖期级联式锄草设备,包括手推车架6,在手推车架6中部位置设置有动力装置安装板7,用于安装动力电池,所述手推车架6末端扶手中部位置安装有调速旋钮10,调速旋钮10一侧配有转速显示器9,并且末端的手推车架6的一侧扶手下方配有启停开关11,所述手推车架6的前端通过螺栓连接横梁12,其中,横梁上开有横向定位孔,用于作业间距调节;横梁一侧设置导轨25,在所述导轨25外部设置有多个动板24,动板24和导轨25之间通过滑块23连接,最外侧的两个动板24上通过螺栓连接l型支撑板2,其他动板24通过螺栓连接背板13,其中,动板24上开有固定孔和微调定位孔27,背板13上开有背板定
位孔28,l型支撑板2上开有高度调节孔,微调定位孔与背板上的背板定位孔相配合实现背板高度的微调,高度调节孔与动板上的固定孔相配合实现行走轮与横梁之间高度的调节。在所述背板13的中部设置有弹簧定位销,背板13上方安装有控制装置5,在所述弹簧定位销下方安装驱动电机15,驱动电机15输出轴连接主动链轮,主动链轮和从动链轮通过传动链条相互连接,并且从动链轮上安装方轴18,方轴18与滚刀锄草器16嵌套连接,同时滚刀锄草器16两侧通过螺栓连接法兰盘17。另外,在所述方轴18一侧末端安装编码器19,负责反馈锄草装置真实转速;在所述背板13两侧通过螺栓连接从动板21,从动板21与滚刀锄草器16之间设置挡圈20,避免运动干扰,在所述传动链条14一侧的从动板21上方设置链条张紧器22,用于张紧传动链条14;在所述l型支撑板2下方通过轴承连接行走轮1。
[0044]
实施例二。
[0045]
如图5,一种如实施例一所述的麦田分蘖期级联式锄草设备的作业控制方法,其包括如下步骤:
[0046]
(1)通过土壤压实度仪对麦田作物行间压实度信息以1m为间距进行采集统计;
[0047]
(2)将田间压实度信息传输到上位控制单元中,上位控制单元根据锄草装置动力学模型得出田间实际土壤阻力情况匹配转速,并将转速信息发送至控制装置;所述动力学模型为:
[0048][0049]
其中,n—电机转速,r/min;i—电机减速比;
[0050]
p—电机功率,kw;r—滚刀锄草器半径,m;
[0051]rl
—探针圆锥半径,m;l—探针圆锥母线长度,m;
[0052]
ci—土壤压实度,pa。
[0053]
(3)所述控制装置采用pid控制方法对上位控制单元输入信号进行处理,确保快速准确调节不同转速,进而提高锄草作业中的可靠性与锄草率。
[0054]
综上所述,由于前期对比试验分析发现,1m内的土壤压实度变化相对较小,因此在作业前,以1m为取点间距,采集作业区域压实度,并通过上位控制单元输入到本锄草设备控制装置5中,作业时,将设备手推车架6扶手位置抬起至滚刀锄草器16进入土壤一定深度,打开启停开关11,本锄草设备即可根据作业区域压实度情况自主调节转速(动力学模型为:),在不同压实度转换时通过控制装置5中pid程序快速有效调节转速,提高作业可靠性与锄草率;当由于小麦植株长势不同或作物行偏斜等原因需要调节锄草装置间距时,拉起背板13上方弹簧定位销,左右移动锄草装置到目标位置,实现在锄草作业中降低伤苗率;当田间路面起伏造成锄草设备偏斜,可调节左右l型支撑板2的高度定位螺栓位置使两锄草装置均位于土下一定深度;在锄草设备搭载不同半径滚刀锄草器时,可通过改变微调定位孔27与背板定位孔28的配合位置,实现统一滚刀锄草器入土深度,确保锄草作业质量。
[0055]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。
[0056]
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。