技术特征:
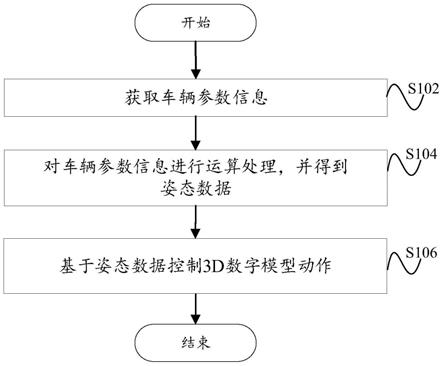
1.一种控制方法,其特征在于,用于控制车辆的3d数字模型,所述控制方法包括:获取车辆参数信息;对所述车辆参数信息进行运算处理,并得到姿态数据;基于所述姿态数据控制所述3d数字模型动作。2.根据权利要求1所述的控制方法,其特征在于,所述车辆参数信息包括以下之一或其组合:轮心加速度信息、悬缸位移变化量及车架角度信息;所述车架角度信息包括侧向倾角和纵向倾角。3.根据权利要求2所述的控制方法,其特征在于,所述车辆包括车架和车轮,所述姿态数据包括所述车架的硬点z坐标和所述车轮的轮心的硬点z坐标;对所述车辆参数信息进行运算处理,并得到姿态数据具体包括:通过所述轮心加速度信息计算出所述车轮的轮心的硬点z坐标。4.根据权利要求3所述的控制方法,其特征在于,所述车辆包括三轴车辆,所述三轴车辆的车轮间距包括前轮间距l1、中轮间距l2和后轮间距l3,前轴和中轴的轴距为w1,中轴和后轴的轴距为w2,所述三轴车辆的所述硬点z坐标数量为12个,12个所述硬点z坐标分别为左前车架硬点z坐标、左前轮心硬点z坐标、右前车架硬点z坐标、右前轮心硬点z坐标、左中车架硬点z坐标、左中轮心硬点z坐标、右中车架硬点z坐标、右中轮心硬点z坐标、左后车架硬点z坐标、左后轮心硬点z坐标、右后车架硬点z坐标、右后轮心硬点z坐标。5.根据权利要求4所述的控制方法,其特征在于,所述车架的硬点z坐标和所述轮心的硬点z坐标具体包括:所述左前车架硬点z坐标为z
左前上
:z
左前上
=(c
左前
∫∫az
左前
dtdt)
×
cosβ
×
cosα,α为侧向倾角,β为纵向倾角,c
左前
为左前悬缸位移变化量,az
左前
为左前轮心加速度信息;所述左前轮心硬点z坐标为z
左前下
:z
左前下
=0;所述右前车架硬点z坐标为z
右前上
:z
右前上
=(z
左前上-l1×
sinα),α为侧向倾角;所述右前轮心硬点z坐标为z
右前下
:z
右前下
=z
右前上-(c
右前
∫∫az
右前
dtdt),c
右前
为右前悬缸位移变化量,az
右前
为右前轮心加速度信息;所述左中车架硬点z坐标为z
左中上
:z
左中上
=(z
左前上
w1×
sinβ)
×
cosα,α为侧向倾角,β为纵向倾角;所述左中轮心硬点z坐标为z
左中下
:z
左中下
=z
左中上-(c
左中
∫∫az
左中
dtdt),c
左中
为左中悬缸位移变化量,az
左中
为左中轮心加速度信息;所述右中车架硬点z坐标为z
右中上
:z
右中上
=(z
左中上-l2×
sinα),α为侧向倾角;所述右中轮心硬点z坐标为z
右中下
:
z
右中下
=z
右中上-(c
右中
∫∫az
右中
dtdt),c
右中
为右中悬缸位移变化量,az
右中
为右中轮心加速度信息;所述左后车架硬点z坐标为z
左后上
:z
左后上
=[z
左前上
(w1 w2)
×
sinβ]
×
cosα,α为侧向倾角,β为纵向倾角;所述左后轮心硬点z坐标为z
左后下
:z
左后下
=z
左后上-(c
左后
∫∫az
左后
dtdt),c
左后
为左后悬缸位移变化量,az
左后
为左后轮心加速度信息;所述右后车架硬点z坐标为z
右后上
:z
右后上
=(z
左后上-l3×
sinα),α为侧向倾角;所述右后轮心硬点z坐标为z
右后下
:z
右后下
=z
右后上-(c
右后
∫∫az
右后
dtdt),c
右后
为右后悬缸位移变化量,az
右后
为右后轮心加速度信息;其中,所述车架的硬点z坐标和所述轮心的硬点z坐标以左前轮心为坐标原点。6.根据权利要求1所述的控制方法,其特征在于,所述车辆参数信息包括:车辆行驶速度、车辆位置及车辆行驶方向;所述控制方法还包括:基于所述车辆行驶速度、所述车辆位置及所述车辆行驶方向驱动所述3d数字模型动作。7.一种控制系统,其特征在于,用于控制车辆的3d数字模型动作,所述控制系统包括:获取装置,用于获取车辆参数信息;信息处理装置,用于对所述车辆参数信息进行运算处理得到姿态数据;驱动装置,基于所述姿态数据控制所述3d数字模型动作。8.一种控制系统,其特征在于,包括:存储器和处理器,所述存储器储存有程序或指令,所述程序或所述指令被所述处理器执行时实现如权利要求1至6中任一项所述的控制方法的步骤。9.一种可读存储介质,其特征在于,其上存储有程序或指令,所述程序或所述指令被执行时,实现如权利要求1至6中任一项所述的控制方法的步骤。10.一种监测系统,用于监测车辆,其特征在于,包括:3d数字模型,所述3d数字模型为对应所述车辆的三维数字模型;如权利要求7或8所述的控制系统或权利要求9所述的可读存储介质。11.根据权利要求10所述的监测系统,其特征在于,还包括:检测组件,设置在所述车辆上,用于检测车辆参数信息。12.根据权利要求11所述的监测系统,其特征在于,所述检测组件包括以下至少之一:轮心加速度传感器,用于检测轮心加速度信息;悬缸位移传感器,用于检测悬缸位移变化量;车架角度传感器,用于检测车架角度信息;车辆gps,用于检测车辆行驶速度和车辆位置;车辆方向传感器,用于检测车辆行驶方向。13.一种车辆系统,其特征在于,包括:
车辆;所述车辆包括如权利要求1至6中任一项所述的控制方法,或如权利要求10至12中任一项所述的监测系统。
技术总结
本发明提供了一种控制方法、系统、可读存储介质、监测系统和车辆系统,控制方法包括:获取车辆参数信息;对车辆参数信息进行运算处理,并得到姿态数据;基于姿态数据控制3D数字模型动作。根据本发明提供的控制方法,通过获取车辆参数信息,并对车辆参数信息进行运算处理,从而驱动3D数字模型进行运动,能够形成与实体车辆一一映射的动作状态,相比于现有技术中都是通过测试的数据直接驱动3D数字模型,或为了保证3D数字模型驱动的实时性,提高3D数字模型运算效率,会将3D数字模型进行降阶处理,但降阶处理的程度复杂,且实时性不高,而本申请能够提高3D数字模型的实时性,使得3D数字模型能够实时展现车辆的动作状态。型能够实时展现车辆的动作状态。型能够实时展现车辆的动作状态。
技术研发人员:刘希梁 苗立野 苗恒新 姜振波 李春雷
受保护的技术使用者:三一重型装备有限公司
技术研发日:2022.01.24
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。