1.本发明涉及一种基于喷涂非金属电极的柔性电致动器及其制备方法,属于柔性电子器件领域。
背景技术:
2.随着人体交互式柔性电子器件的不断演化,包括触感生物心理系统、触觉渲染系统和触控界面等在内的柔性触觉感应系统逐渐吸引研究者的关注。起到效应器作用的“人造肌肉”便是柔性触觉感应系统的一个重要组成部分,这是一个重叠了材料科学、化学工程、机械工程、电气工程和化学等多个学科的领域。作为一类材料和装置的总称,人造肌肉器件可以在一个组件内由于各种外部刺激(如电压、电流、压力、温度、光强等)而可逆地收缩、膨胀或旋转,从而起到各类致动效果。
3.特别地,在柔性电子系统中,为了使人造肌肉“效应器”和前端“感受器”(传感模块)相衔接,电信号致动的人造肌肉即柔性电致动器有着较广的应用。和刚性器件相比,柔性电致动器具有弹性,用作机器人手时可以对所夹持物体(尤其是易碎物体)起到较好的保护作用,同时其柔性特性也可以帮助其灵活适应变化的环境,可无限切割特性也使其在微系统中得到广泛应用。如果在器件中集成药物递送、多模传感、生物相容和生物降解、颜色变化等多重功能,柔性电致动器将在航空航天、生物医学工程、军事、太空探险和深海探查等诸多领域发挥重大作用。
4.柔性电致动器通常包括聚合物中间层和电极层两个部分。按照聚合物类型划分,有导电聚合物型和离子聚合物型两种。导电聚合物型柔性电致动器是利用电场来驱动,相比离子聚合物型柔性电致动器来说需要施加很高的电压,因此通常不应用在人体交互式柔性电子系统中。离子聚合物型柔性电致动器通过在电极层两端施加一个小直流电压,即可导致聚合物中间层内的离子向两极移动,阴阳离子的尺寸差进一步导致器件产生和电压极性相对应的可逆弯曲。然而,对于柔性电致动器的电极层,现有研究通常采用蒸镀贵金属(如金、铂等)或物理气相沉积氧化铟锡(ito)类薄膜的方法。前者工艺复杂,成本昂贵,且囿于微加工工艺设备真空等要求限制,无法进行大规模工程制造;后者由于ito等同类薄膜较脆的属性,在器件工作过程中容易发生龟裂,从而影响器件循环寿命。
5.为了让柔性电致动器应用于机器人手等场景时能有较快的响应速度,器件需要有适宜的尺寸,电极层需要有良好的导电性,离子聚合物层的离子需要有较好的迁移性,且离子聚合物层与电极层各组分都需要有良好的机械性能。金属材料如pt等作电极材料时可以有极强的导电性,但其成本昂贵,且大规模制造受阻于相关微加工工艺设备,同时由于金属与离子聚合物中间层的巨大机械特性差异,器件的驱动可靠性会受到较大影响。因此,采用非金属材料做电极层有着非常重要的意义,不但可以低成本便捷进行大规模制备以及自定义图案化,而且器件的致动速度(带宽)也会有较好的保证。
技术实现要素:
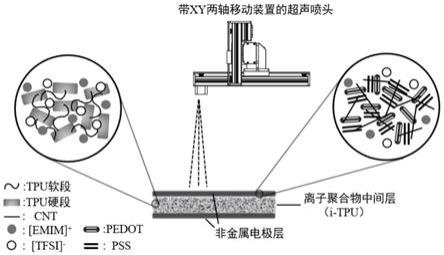
6.本发明的目的是针对现有技术中的问题,提供一种基于喷涂非金属电极的柔性电致动器及其制备方法,本发明采用热塑性聚氨酯弹性体(tpu)胶粒和离子液体1-乙基-3-甲基咪唑双(三氟甲磺酰)亚胺([emim] [tfsi]-)混合制成离子聚合物中间层,
[0007]
使用超声喷涂设备与xy两轴移动装置在两侧大规模喷涂非金属导电高分子材料pedot:pss和碳纳米管(cnt)以及相关添加剂组成的电极层。所制得柔性电致动器可在
±
3v直流电压下,于数秒内产生对应方向的2mm左右位移,并且在断电后回复到初始位置。所制得柔性电致动器性能与采用金属电极层的柔性电致动器相当,但工艺简单,制备快捷,稳定性好,且可大规模图案化。
[0008]
本发明为解决上述技术问题采用以下技术方案:
[0009]
一种基于喷涂非金属电极的柔性电致动器,所述柔性电致动器为三明治结构,包括离子聚合物中间层及其上下两侧的非金属电极层;
[0010]
所述离子聚合物中间层由聚氨酯弹性体胶粒和离子液体混合制成;
[0011]
所述非金属电极层由非金属导电高分子材料和碳纳米管以及添加剂组成。
[0012]
进一步的,所述添加剂为dmso、乙醇和离子液体;所述非金属导电高分子材料为pedot:pss;所述离子液体为1-乙基-3-甲基咪唑双(三氟甲磺酰)亚胺([emim] [tfsi]-)。
[0013]
进一步的,所述离子聚合物中间层的厚度为0.2-0.4mm;所述非金属电极层的厚度为1-5μm。
[0014]
一种基于喷涂非金属电极的柔性电致动器的制备方法,包括以下步骤:
[0015]
s1、制备i-tpu离子聚合物中间层;
[0016]
s2、制备非金属电极前驱体溶液;
[0017]
s3、将步骤s2制备的电极层前驱体溶液通过超声喷涂工艺附着到步骤s1制备的离子聚合物中间层的上下两面,即制备得到所述柔性电致动器。
[0018]
5、如权利要求4所述一种基于喷涂非金属电极的柔性电致动器的制备方法,其特征在于,步骤s1包括以下步骤:
[0019]
s11、将n,n-二甲基甲酰胺溶液在烧瓶中加热至80℃,缓慢加入tpu胶粒,搅拌至全部溶解;
[0020]
s12、向步骤s11的烧瓶中加入离子液体,并于80℃磁力搅拌12小时;得到i-tpu溶液;
[0021]
s13、将步骤s12所得i-tpu溶液放入60℃烘箱中静置2小时去除上层气泡,随后趁热滴于玻璃培养皿盖的中部并置于水平光学平台上静置5分钟使i-tpu溶液分散均匀;所述培养皿盖直径与所滴i-tpu溶液质量的比例关系为3cm:2g;
[0022]
s14、将步骤s13的培养皿盖放入40℃烘箱中,每隔1小时增加10℃直至烘箱内温度达120℃,保持此温度24小时,随后对烘箱抽真空12小时;冷却后用镊子将i-tpu离子聚合物中间层从培养皿盖上剥离开即得到所述i-tpu离子聚合物中间层。
[0023]
进一步的,加入的n,n-二甲基甲酰胺溶液、tpu胶粒和离子液体的质量比为3:1:1.2。
[0024]
进一步的,步骤s2包括以下步骤:
[0025]
s21、取pedot:pss水分散体溶液,加入dmso、乙醇和离子液体,40℃水浴搅拌3小
时;
[0026]
s22、将碳纳米管缓慢加入步骤s21正在进行磁力搅拌的混合溶液中,继续搅拌1小时后用90w超声处理3分钟,使碳纳米管分散均匀,得到所述非金属电极前驱体溶液。
[0027]
进一步的,所述pedot:pss水分散体溶液、dmso、乙醇、离子液体和碳纳米管的质量比为:300:15:35:4.5:1.3。
[0028]
进一步的,步骤s3包括以下步骤:
[0029]
s31、用5ml注射器吸取非金属电极前驱体溶液置于推进泵上,设置推进速度为0.8ml/min,运行一段时间后排出进液软管中的空气,同时打开热台,设置温度为80℃,打开与超声喷头连接的压缩氮气阀门,气压0.1mpa;
[0030]
s32、将超声喷头与xy两轴移动装置相连接,使喷头以“s形”路径循环移动以便后续均匀喷涂,移动速度设置为5mm/s,超声喷头底部与热台之间的距离为25cm,并将步骤s1制得的i-tpu离子聚合物中间层置于热台中央预热;
[0031]
s33、先打开超声喷头的超声发生器开关,控制频率在60.2khz-60.8khz之内,然后再启动推进泵进液程序,以0.8ml/min的推进速度喷涂10分钟;
[0032]
s34、将喷涂有单面非金属电极层的i-tpu离子聚合物中间层置于载玻片上,放入管式炉进行高温退火;
[0033]
s35、将i-tpu离子聚合物中间层未喷涂非金属电极层的一面重复步骤s33和步骤s34,得到喷涂有双面非金属电极层的离子聚合物中间层,即所述基于喷涂非金属电极的柔性电致动器。
[0034]
进一步的,所述步骤s34中的退火程序为:15分钟内从25℃升温至160℃并维持1小时,随后自然降温。
[0035]
器件原理:离子聚合物中间层和其上下两表面喷涂的非金属电极层构成了双电极层(edl)结构。当两侧电极被施加一个小直流电压时,离子聚合物中间层形成一个小电场,其中的阳离子和阴离子在电场作用下分别移动到对应的电极层表面附近。由于阴阳离子体积尺寸有所差别,集聚一定数量后便会引发整个柔性电致动器的机械弯曲。
[0036]
有益效果
[0037]
本发明的制备方法不但可以低成本便捷进行大规模制备以及自定义图案化,而且器件的致动速度(带宽)也会有较好的保证。本发明所制得柔性电致动器可在
±
3v直流电压下,于数秒内产生对应方向的2mm左右位移,并且在断电后回复到初始位置。
[0038]
作为一种经典非金属电极材料,pedot:pss具有很好的导电性、出色的机械性能以及在水溶液中相对其他非金属电极材料更好的分散度。但由于pedot:pss水分散体与离子聚合物中间层(i-tpu)的疏水表面接触不是很良好,所以需要一些特定物质来优化pedot:pss电极与离子聚合物中间层的接触情况。
[0039]
dmso的添加可以改善pedot:pss的分子排列,使排列更加有序,从而形成更高导电性能的通道。同时,dmso可以优化pedot:pss非金属电极层与离子聚合物中间层(i-tpu)的表面接触,使得pedot:pss链可以更好地与i-tpu交融。事实上,在对比试验中可见,掺杂dmso的pedot:pss水分散体相比纯的pedot:pss水分散体,在i-tpu疏水表面有着更小的接触角。
[0040]
用乙醇将pedot:pss水分散体进行一定比例的稀释可以大大改善喷涂pedot:pss
电极层的导电性和平整性等性能。首先,乙醇作为有机溶剂,将其掺杂进pedot:pss可以提高pedot:pss水分散体的粘度,从而降低液体的表面张力,改善液滴与衬底的接触;其次,原始pedot:pss水分散体在成膜时易发生团聚现象,而经过乙醇稀释后可以促进pedot和pss相分离,使最终电极层上的团聚pedot:pss颗粒变小甚至消失,电极薄膜表面更加平滑;另外,有机溶剂乙醇还可以使pedot:pss水分散体中的pedot聚合物链的构型发生变化,由卷曲型变为线型或膨胀的卷曲型,从而提高非金属电极层的导电性。
[0041]
在掺杂dmso的乙醇稀释pedot:pss溶液中再添加一定量的碳纳米管(cnt)并进行超声处理使其均匀分布在水分散体中,可以进一步提高非金属电极层的导电性以及与离子聚合物中间层的附着性。在超声喷涂前期,得益于cnt的巨大长径比,cnt落在离子聚合物中间层(i-tpu)表面起到桥梁作用,一定程度上抵消了i-tpu疏水表面对电极材料附着的负面影响。随着超声喷涂的进行和pedot:pss的初步附着,cnt本身之间以及与pedot和pss之间相互链接,进一步提高了非金属电极层的导电性。
附图说明
[0042]
图1为本发明所制得柔性电致动器基本结构和功能示意图;
[0043]
图2为本发明所制得柔性电致动器的离子聚合物中间层和非金属电极层各自微观结构示意图;
[0044]
图3为本发明所使用带xy两轴移动装置的超声喷头移动轨迹设计图;
[0045]
图4为本发明所制得柔性电致动器实物图以及加 3v直流电压时位移示意图;
[0046]
图5为本发明所制得柔性电致动器喷涂非金属电极层的扫描电子显微镜(sem)图像;
[0047]
图6为本发明所制得柔性电致动器在激光测距装置下测得的位移-时间曲线图。
具体实施方式
[0048]
下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
[0049]
实施例1:柔性电致动器的离子聚合物中间层制备方式如下:
[0050]
1、用天平称量10g tpu胶粒置于培养皿中待用,同时用移液枪取30g n,n-二甲基甲酰胺(dmf)溶液(根据dmf在该温度下的密度换算得体积为31.75ml)于圆底烧瓶中并放入水浴锅中加热至80℃;
[0051]
2、在圆底烧瓶中加入磁力搅拌子进行搅拌,同时缓慢加入tpu胶粒(加入速度过快容易使半溶解状态的tpu胶粒堆结在烧瓶底部,妨碍搅拌),搅拌1小时左右直至tpu胶粒全部溶解在dmf中;
[0052]
3、向圆底烧瓶中加入tpu胶粒质量120%(即12g)的离子液体1-乙基-3-甲基咪唑双(三氟甲磺酰)亚胺([emim]
[tfsi]-),并于80℃磁力搅拌12小时;
[0053]
4、将通过以上步骤制成的i-tpu溶液放入60℃烘箱中静置2小时去除上层气泡,随后趁热滴于特制玻璃培养皿盖的中部(培养皿盖直径6cm,所滴i-tpu溶液质量为4.0g)并置于水平光学平台上静置5分钟使i-tpu溶液分散均匀;
[0054]
5、将表面涂有i-tpu溶液的玻璃培养皿盖放入40℃烘箱中(无需抽真空),每隔1小
时增加10℃直至烘箱内温度达120℃,保持此温度24小时,随后对烘箱抽真空12小时排出烘箱内的有毒气体和水蒸气;
[0055]
6、关闭烘箱加热系统,待玻璃培养皿盖冷却后用镊子将i-tpu离子聚合物中间层从培养皿盖上剥离开。
[0056]
实施例2:柔性电致动器的超声喷涂非金属电极层制备方式如下:
[0057]
1、取30g pedot:pss水分散体溶液,加入1.5g dmso、3.5g乙醇和0.45g离子液体,40℃水浴搅拌3小时;
[0058]
2、用天平称量0.13g碳纳米管(cnt)于称量纸上待用,用小勺缓慢将cnt加入上述正在进行磁力搅拌的混合溶液中,继续搅拌1小时后用90w超声处理3分钟,使cnt分散均匀,得到非金属电极前驱体溶液;
[0059]
3、用5ml注射器吸取非金属电极前驱体溶液置于推进泵上,设置推进速度为0.8ml/min,运行一段时间后排出进液软管中的空气,同时打开热台(设置温度为80℃),打开与超声喷头连接的压缩氮气阀门(气压0.1mpa);
[0060]
4、将超声喷头与xy两轴移动装置相连接,使喷头以“s形”路径(见附图3)循环移动以便后续均匀喷涂,移动速度设置为5mm/s,超声喷头底部与热台之间的距离为25cm,并将预先制得的i-tpu离子聚合物中间层置于热台中央预热;
[0061]
5、先打开超声喷头的超声发生器开关,控制频率在60.2khz-60.8khz之内,然后再启动推进泵进液程序,以0.8ml/min的推进速度喷涂10分钟;
[0062]
6、将喷涂有单面非金属电极层的i-tpu置于载玻片上,放入管式炉进行高温退火(退火程序为:15分钟内从25℃升温至160℃并维持1小时,随后自然降温);
[0063]
7、将i-tpu未喷涂非金属电极层的一面重复上述步骤5和步骤6,得到喷涂有双面非金属电极层的离子聚合物中间层,即基于喷涂非金属电极的柔性电致动器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。