1.本技术涉及磨床的技术领域,更具体地说,它涉及一种自动上下料装置及高精度磨床。
背景技术:
2.磨床是一种利用磨具对工件表面进行磨削加工的机床,主要对表面精度要求高以及表面粗糙度小的工件进行加工。
3.磨床是标准机床加工设置,上下料过程都是依靠人工操作,需要人工装夹以及人工下料,但人工上下料存在安全隐患大的缺陷,有待改善。
技术实现要素:
4.为了降低磨床上下料的安全隐患,本技术提供一种自动上下料装置及高精度磨床。
5.本技术提供的一种自动上下料装置及高精度磨床,采用如下的技术方案:一种自动上下料装置,包括机架,所述机架设有加工工位,所述机架连接有工作台,所述工作台设有进料工位和出料工位;所述进料工位、出料工位以及加工工位三者之间共线设置,所述工作台设有移动夹取机构,所述移动夹取机构包括移动组件和夹取组件;所述夹取组件用于夹取工件,所述移动组件用于带动夹取组件于进料工位、出料工位以及加工工位之间来回移动。
6.通过上述技术方案,设置移动夹取机构、进料工位、出料工位以及加工工位,当工件需要加工时,移动夹取机构能够将进料工位上放置的工件夹取,并携带工件移动至加工工位,与磨床上的装夹机构以及定位机构配合,对工件进行装夹,完成上料并等待加工;当工件完成加工需要下料时,移动夹取机构可以移动至加工工位,将加工工位上加工完毕的工件取下,再携带工件移动至出料工位,并将工件放置于出料工位,完成工件的下料;整个过程可以实现自动上下料,无需人工对工件进行手动上料或者下料,降低了磨床上下料的安全隐患。
7.可选的,所述移动组件包括x轴移动部件和z轴移动部件,所述夹取组件包括夹取部件和回转部件;所述z轴移动部件滑移连接于x轴移动部件,所述回转部件安装于z轴移动组件的下端,所述夹取部件连接于回转部件;所述x轴移动部件用于带动z轴移动部件于进料工位、出料工位以及加工工位之间来回移动,所述z轴移动部件用于带动回转部件和夹取部件于竖直方向来回移动,所述回转部件用于带动夹取部件转动,所述夹取部件用于夹取工件。
8.通过上述技术方案,设置移动组件包括x轴移动部件和z轴移动部件,所述夹取组件包括夹取部件和回转部件,x轴移动部件能够带动z轴移动部件于进料工位、出料工位以
及加工工位之间来回移动,z轴移动部件能够带动回转部件和夹取部件于竖直方向移动,因此只需要实现两个方向上的来回移动,即可将工件移动至进料工位、出料工位以及加工工位,定位较为简单,较易实现精准定位,能够提高工件上下料的精确性。
9.可选的,所述机架连接有安装架;所述x轴移动部件包括导轨、滑块、滑移座、齿条、主动齿轮以及驱动件;所述导轨平行于进料工位、出料工位以及加工工位的分布方向设置并安装于安装架上,所述滑块滑移连接于导轨,所述滑移座与滑块固定连接,所述滑移座通过滑块滑移连接于导轨,所述齿条平行于导轨设置,所述主动齿轮啮合于齿条,所述驱动件安装于滑移座用于驱动主动齿轮转动以带动滑移座沿导轨滑移;所述z轴移动部件为直线模组,所述直线模组沿竖直方向设置,所述直线模组的输出端固定连接于滑移座。
10.通过上述技术方案,设置x轴移动部件包括导轨、滑块、滑移座、齿条、主动齿轮以及驱动件,通过齿轮齿条的传动形式,使得x轴移动部件能够为z轴移动部件提供较为充足的动力,且能够使得z轴移动部件于进料工位、出料工位以及加工工位之间的移动更加平稳;设置z轴移动部件为直线模组,直线模组具有良好的定位精度,可以实现夹取组件于高度上的精确调节,提高工件上下料的精确性。
11.可选的,所述回转部件包括回转固定座、回转连接座以及用于驱动回转连接座转动的回转驱动件;所述回转固定座固定于直线模组的下端,所述回转驱动件安装于回转固定座远离直线模组的一端,所述回转驱动件的输出端朝远离直线模组的方向呈倾斜向下设置,且所述回转驱动件输出端的转动轴线和竖直方向的夹角为45度,所述回转连接座固定连接于回转驱动件的输出端;所述夹取部件包括两个用于夹取工件的气动夹爪,两个气动夹爪均安装于回转连接座并关于回转驱动件的转动轴线呈对称设置,两个气动夹爪之间相互垂直;当两个所述气动夹爪中有一个气动夹爪的输出端呈竖直向下时,另一个所述气动夹爪的输出端呈水平设置。
12.通过上述技术方案,设置夹取部件包括两个气动夹爪,当加工工位有工件进行加工时,两个气动夹爪中的一个气动夹爪可以移动至进料工位夹取下一个待加工工件,夹取成功后,回转驱动件旋转90度使得闲置的气动夹爪输出端呈竖直向下设置并移动至加工工位的上方进行等待,方便夹取加工完成的工件;当上一个工件加工完毕后,两个气动夹爪中闲置的气动夹爪可以对加工完毕的工件进行夹取,完成工件的下料后,回转驱动件带动两个气动夹爪旋转90度,使得另一个夹持有待加工工件的气动夹爪的输出端正对于加工工位,再通过z轴移动部件将待加工工件装夹于磨床上的装夹机构;完成待加工工件的装夹后,移动夹取机构将加工完毕的工件放置于出料工位进行出料,工件放置完毕后,移动夹取机构再夹取下一个待加工工件并移动至加工工位进行等待,以此往复,可以实现工件上下料的无缝衔接,提高工件的加工效率。
13.可选的,所述工作台设有进料机构,所述进料机构包括驱动电机、传动组件以及两组平行设置的同步链组件;所述同步链组件包括主动链轮、从动链轮以及配合连接于主动链轮和从动链轮的
链条;所述传动组件包括第一同步轴和第二同步轴,所述第一同步轴同轴连接于两个主动链轮,所述第二同步轴同轴连接于两个从动链轮,所述驱动电机用于驱动两个主动链轮同步转动;每条所述链条均设有若干承载齿;两条所述链条上的若干承载齿数量相同且位置一一对应,每个所述承载齿远离对应链条的一端均设有承载槽,两个相对应的承载齿上的承载槽用于供工件轴线方向的两端放置,两条所述链条用于将承载槽上放置的工件输送至进料工位;所述工作台还设有输送带,所述输送带的输送方向和两条链条的输送方向相反,所述输送带用于将出料工位上的工件送出。
14.通过上述技术方案,设置进料机构以及输送带,进料机构可以实现工件的承载以及输送,将工件较为精确的输送至进料工位,输送带可以将出料工位上的工件送出,实现工件的自动进出料,减少人工的干预,减轻操作人员的负担。
15.可选的,所述输送带包括主动轮、从动轮以及张紧于主动轮和从动轮的同步带;所述第一同步轴靠近同步带的一端同轴设有第一换向齿轮,所述主动轮同轴设有第二换向齿轮,所述第二换向齿轮和第一换向齿轮相互啮合。
16.通过上述技术方案,设置第一换向齿轮和第二换向齿轮,使得驱动电机可以同时带动链条和输送带运转,且保证链条的输送方向和输送带的输送方向相反,链条进给工件的同时,输送带也能够带动工件远离出料工位,可以避免输送带未及时将出料工位上的工件带离的情况出现,进一步提高了整体的自动化水平,减轻操作人员的负担。
17.可选的,所述工作台设有控制柜以及传感器,所述传感器用于检测进料工位上的工件情况并将检测信号传递至控制柜,所述控制柜用于接收信号并控制进料机构的启停;当所述传感器检测到进料工位无工件时,所述控制柜控制驱动电机启动以带动两条链条同步运转,将工件输送至进料工位;当所述传感器检测到进料工位有工件放置时,所述控制柜控制驱动电机停止运行。
18.通过上述技术方案,设置传感器和控制柜,通过传感器检测进料工位的工件情况,再通过控制柜控制驱动电机的启停;在使用过程中,工作人员只需提前在两条链条上端的若干承载槽上放置一定量的工件,之后只需隔断时间添加一定量的工件以及取走加工完毕的工件即可,无需时刻关注设备的运转情况,极大的减轻了工作人员的负担,提高了自动化生产的效率。
19.可选的,所述工作台的上端设有两个顶升气缸,两个所述顶升气缸分别位于两个链条相对的两侧;每个所述顶升气缸的输出端均竖直向上设置,每个所述顶升气缸的输出端均设有导向架;所述导向架的上端设有导向通槽,所述导向通槽的贯穿方向平行于进料工位、出料工位以及加工工位的分布方向,所述导向通槽的槽口以及槽底均位于进料工位的正下方,所述导向通槽相对的两个侧壁朝靠近槽底的方向相互靠近;当所述顶升气缸向上顶升时,所述导向架向上顶升用于托起工件,且所述导向通槽用于供工件放置。
20.通过上述技术方案,设置顶升气缸、导向架以及导向通槽,当工件输送至进料工位
时,顶升气缸向上顶升导向架,因导向通槽位于进料工位的正下方,导向架上升的过程中工件会被导向通槽的相对侧壁托起,且由于顶升气缸于工作台上的位置保持不变,因此气动夹爪每次夹取同类工件的位置均固定不变,极大的提高了工件夹取的成功率,进而极大的降低了设备的故障率。
21.可选的,所述安装架设有限位开关,所述限位开关位于导轨远离机架的一端,所述工作台设有控制顶升气缸运转的电磁阀,所述限位开关和电磁阀之间通过导线连接;当所述滑移座移动至进料工位正上方时,所述滑移座抵触于限位开关并使限位开关接通,所述限位开关通过电磁阀控制顶升气缸向上顶升;当所述滑移座朝远离限位开关的方向滑移时,所述限位开关断开,所述电磁阀控制顶升气缸的输出端复位。
22.通过上述技术方案,设置限位开关和电磁阀,实现移动夹取机构和进料机构以及顶升气缸的联动,顶升气缸仅在移动夹取机构需要夹取工件时上升,且移动夹取机构夹取工件从进料工位移走后,顶升气缸即复位,减少不必要的能源损耗。
23.本技术提供的一种高精度磨床,包括上述任一所述的自动上下料装置,还包括装夹机构、定位机构以及打磨机构,所述装夹机构用于装夹工件并带动工件绕自身轴线旋转,所述定位机构用于供工件定位,所述打磨机构用于对工件进行打磨。
24.通过上述技术方案,降低了磨床上下料的安全隐患。
25.综上所述,本技术包括以下至少一种有益技术效果:(1)通过设置移动夹取机构、进料工位、出料工位以及加工工位,可以实现自动上下料,无需人工对工件进行手动上料或者下料,降低了磨床上下料的安全隐患;(2)通过设置进料机构以及输送带,可以实现工件的自动进出料,减少人工的干预,减轻操作人员的负担;(3)通过设置顶升气缸、导向架以及导向通槽,由于顶升气缸于工作台上的位置保持不变,因此气动夹爪每次夹取同类工件的位置均固定不变,极大的提高了工件夹取的成功率,进而极大的降低了设备的故障率。
附图说明
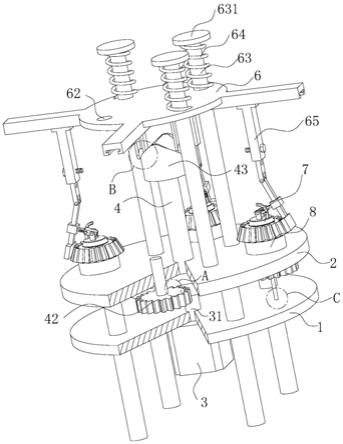
26.图1为本实施例的整体结构示意图。
27.图2为本实施例的整体结构示意图,用于展示移动夹取机构的结构。
28.图3为本实施例的整体结构剖视示意图。
29.图4为本实施例的x轴移动部件局部结构放大示意图。
30.图5为本实施例的工作台结构示意图。
31.图6为本实施例的进料机构和输送带结构示意图。
32.图7为本实施例的链条和承载齿的部分结构放大示意图。
33.图8为本实施例的工作台结构示意图,用于展示电磁阀以及导向通槽的结构。
34.图9为本实施例的整体结构示意图,用于展示限位开关的结构。
35.图10为本实施例的整体结构示意图,用于展示机架的内部结构。
36.附图标记:1、机架;2、工作台;3、加工工位;4、进料工位;5、出料工位;6、移动夹取机构;61、移动组件;611、x轴移动部件;6111、导轨;6112、滑块;6113、滑移座;6114、齿条;6115、主动齿轮;6116、驱动件;6117、滑移通槽;612、z轴移动部件;6121、直线模组;62、夹取
组件;621、回转部件;6211、回转固定座;6212、回转连接座;6213、回转驱动件;622、夹取部件;6221、气动夹爪;7、进料机构;71、驱动电机;72、传动组件;721、第一同步轴;722、第二同步轴;73、同步链组件;731、主动链轮;732、从动链轮;733、链条;734、承载齿;735、承载槽;8、输送带;81、主动轮;82、从动轮;83、同步带;9、安装架;10、第一换向齿轮;11、第二换向齿轮;12、传感器;13、控制柜;14、电磁阀;15、顶升气缸;16、导向架;17、导向通槽;18、限位开关;19、量仪;20、装夹机构;21、定位机构;22、打磨机构。
具体实施方式
37.以下结合附图对本技术作进一步详细说明。
38.本技术实施例公开一种自动上下料装置。
39.参照图1,包括机架1和工作台2,机架1设置有加工工位3,工作台2设置有进料工位4和出料工位5。进料工位4、出料工位5以及加工工位3于一条直线上依次分布。
40.机架1的上端安装有移动夹取机构6,工作台2的上端安装有进料机构7和输送带8。
41.参照图1和图2,移动夹取机构6包括移动组件61和夹取组件62;移动组件61包括x轴移动部件611以及z轴移动部件612。夹取组件62包括回转部件621和夹取部件622。
42.参照图1和图3,x轴移动部件611包括导轨6111、滑块6112、滑移座6113、齿条6114、主动齿轮6115以及驱动件6116。机架1的上端固定连接有安装架9,导轨6111安装于安装架9上并横跨于进料工位4、出料工位5以及加工工位3的正上方,导轨6111的长度方向平行于进料工位4、出料工位5以及加工工位3的分布方向,且导轨6111长度方向的两端均分别突出于进料工位4和加工工位3相互远离的两端。
43.参照图3和图4,滑块6112滑移连接于导轨6111,滑块6112沿导轨6111的长度方向滑移。齿条6114固定于安装架9安装有导轨6111的端面,齿条6114位于导轨6111的上端,齿条6114的长度方向和导轨6111的长度方向平行,齿条6114长度方向的两端分别与导轨6111长度方向的两端对齐。滑移座6113固定连接于滑块6112远离导轨6111的一端。驱动件6116为伺服电机,驱动件6116安装于滑移座6113的内部,主动齿轮6115同轴固定于驱动件6116的输出轴,且主动齿轮6115啮合于齿条6114。驱动件6116带动主动齿轮6115转动,主动齿轮6115和齿条6114之间相互传动,进而带动滑移座6113沿导轨6111的长度方向于导轨6111上滑移。
44.可替代的,驱动件6116还可以为步进电机,x轴移动组件61中还可以用丝杆代替主动齿轮6115和齿条6114,通过丝杆传动的方式带动滑移座6113沿导轨6111的长度方向滑移。
45.参照图2和图3,滑移座6113开设有滑移通槽6117,滑移通槽6117沿竖直方向贯穿滑移座6113的上下两端。z轴移动部件612为直线模组6121,直线模组6121穿过滑移通槽6117并连接于滑移座6113。直线模组6121沿竖直方向设置,且直线模组6121的输出端固定连接于滑移座6113的下端。
46.回转部件621包括回转固定座6211、回转连接座6212以及回转驱动件6213。回转固定座6211固定连接于直线模组6121的下端。回转驱动件6213为回转气缸,回转驱动件6213安装于回转固定座6211远离直线模组6121的一端,且回转驱动件6213的输出端朝远离直线模组6121的一端倾斜向下设置,回转驱动件6213输出端的转动轴线和竖直方向的夹角呈45
度设置。回转连接座6212整体呈直三棱柱状,回转连接座6212固定于回转驱动件6213的输出端,且回转连接座6212相互垂直的两个端面关于回转驱动件6213输出端的转动轴线呈对称设置。
47.可替代的,回转驱动件6213还可以步进电机。
48.夹取部件622包括两个用于夹取工件的气动夹爪6221,两个气动夹爪6221分别安装于回转连接座6212相互垂直的两个侧壁。两个气动夹爪6221的输出端相互垂直,且两个气动夹爪6221关于回转驱动件6213输出端的转动轴线对称设置。
49.当两个所述气动夹爪6221中有一个气动夹爪6221的输出端呈竖直向下设置时,另一个所述气动夹爪6221的输出端呈水平设置。
50.参照图5和图6,进料机构7包括驱动电机71、传动组件72以及两组平行设置的同步链组件73;同步链组件73包括主动链轮731、从动链轮732以及啮合于主动链轮731和从动链轮732的链条733。主动链轮731的轴线和从动链轮732的轴线相互平行,且主动链轮731和从动链轮732的轴线均平行于进料工位4、出料工位5的分布方向设置。
51.传动组件72包括第一同步轴721和第二同步轴722,第一同步轴721同轴连接于两组同步链组件73中的两个主动链轮731,第二同步轴722同轴连接于两组同步链组件73中的两个从动链轮732。
52.驱动电机71安装于工作台2的上端,第一同步轴721和驱动电机71的输出轴同轴固定连接,驱动电机71用于带动第一同步轴721转动。
53.参照图6和图7,两条链条733相对的两侧均均匀固定有若干承载齿734,两条链条733上的承载齿734数量相同且位置一一对齐。每个承载齿734均开设有用于承载工件的承载槽735,每两个对齐的承载槽735用于供工件轴向的两端放置。
54.参照图5和图6,输送带8包括主动轮81、从动轮82以及张紧于主动轮81和从动轮82的同步带83。第一同步轴721靠近同步带83的一端同轴固定有第一换向齿轮10,主动轮81靠近第一同步轴721的一端同轴固定有第二换向齿轮11,第一换向齿轮10和第二换向齿轮11相互啮合。
55.进料工位4位于两根链条733上端靠近第二同步轴722的一端,出料工位5位于同步带83上端远离主动轮81的一端。工作台2上端安装有传感器12,工作台2还开设有安装腔,安装腔内安装有控制柜13。工作台2上端的传感器12类型为光电传感器12,传感器12的感应端沿水平方向朝向进料工位4设置,用于检测进料工位4上工件的有无并将信号传递至控制柜13进行处理。
56.参照图8和图9,工作台2的上端面还安装有电磁阀14和两个顶升气缸15。两个顶升气缸15均位于进料工位4的正下方,且两个顶升气缸15分别靠近两根链条733相对的两侧设置。每个顶升气缸15的输出端均竖直向上设置,且均朝向进料工位4。每个顶升气缸15的输出端均固定连接有导向架16,导向架16的上端开设有导向通槽17。导向通槽17的贯穿方向均平行于进料工位4和出料工位5的分布方向。导向通槽17的槽口以及槽底均位于进料工位4的正下方设置,导向通槽17相对侧壁之间的间距朝靠近槽底的方向逐渐变小。电磁阀14和两个顶升气缸15之间通过气动接头以及pu管实现连接,电磁阀14用于控制两个顶升气缸15的升降。
57.安装架9安装有限位开关18,限位开关18位于导轨6111远离机架1的一端且限位开关18朝向机架1设置,限位开关18和电磁阀14之间通过导线连通。当滑移座6113移动至进料工位4正上方时,滑移座6113抵触于限位开关18,使得限位开关18接通,电磁阀14控制两个顶升气缸15的输出端上升;当滑移座6113从进料工位4正上方移走时,滑移座6113不再与限位开关18抵接,限位开关18断开,电磁阀14控制两个顶升气缸15的输出端复位。
58.本技术实施例还公开了一种高精度磨床,包括量仪19、装夹机构20、定位机构21以及打磨机构22,量仪19、装夹机构20、定位机构21以及打磨机构22均安装于机架1的上端面。量仪19用于检测工件的加工情况,装夹机构20用于装夹工件并带动工件绕自身轴线旋转,定位机构21用于供工件定位定心,打磨机构22用于对工件进行打磨。
59.实际使用过程如下:s1,参照图9和图10,控制柜13控制装夹机构20、定位机构21、打磨机构22、移动夹取机构6、进料机构7以及输送带8全部初始化,使得两个气动夹爪6221中有一个气动夹爪6221的输出端呈竖直向下设置,并且正对于进料工位4,且滑移座6113和限位开关18抵接,等待夹取待加工工件;s2,于两条链条733上端的若干承载槽735依次放置若干根待加工的工件;s3,启动驱动电机71,驱动电机71带动两根链条733同步运转将工件送往进料工位4;当有工件送至进料工位4时,传感器12检测到信号并将信号传递至控制柜13,控制柜13控制驱动电机71停止转动;s4,控制柜13控制限位开关18启动,使得限位开关18处于接通状态,通过电磁阀14控制两个顶升气缸15的输出端上升,导向通槽17相对的侧壁将位于进料工位4上的工件顶起;s5,z轴移动部件612带动气动夹爪6221竖直下降进行工件夹取,工件夹取完成后,z轴移动部件612带动气动夹爪6221竖直上升,气动夹爪6221上升一定高度后,x轴移动部件611带动气动夹爪6221夹持工件朝加工工位3方向移动;同时,限位开关18断开后,电磁阀14控制两个顶升气缸15复位,顶升气缸15复位后,控制柜13控制驱动电机71转动,链条733运转将下个待加工工件送至进料工位4;s6,x轴移动部件611将工件移动至加工工位3正上方后,z轴移动部件612向下移动将待加工工件装夹于装夹机构20,同时工件通过定位机构21完成定心;s7,装夹完毕后,打磨机构22开始对工件进行打磨;工件打磨的同时,z轴移动部件612带动气动夹爪6221向上移动,移动至一定高度后,x轴移动部件611带动z轴移动部件612向进料工位4移动,进行下一个待加工工件的夹取;s8,当气动夹爪6221移动至进料工位4的正上方后,限位开关18启动,电磁阀14控制顶升气缸15上升,电磁阀14控制两个顶升气缸15的输出端上升,导向通槽17相对的侧壁将位于进料工位4上的工件顶起供气动夹爪6221抓取;s9,夹取待动工工件完成后,z轴移动部件612带动气动夹爪6221上升,x轴移动部件611带动z轴移动部件612向加工工位3移动;同时,限位开关18断开,电磁阀14控制两个顶升气缸15复位,顶升气缸15复位后,控制柜13控制驱动电机71转动,链条733运转将下个待加工工件送至进料工位4进行等待;且x轴移动部件611带动z轴移动部件612向加工工位3移动的过程中,回转驱动件6213带动夹取有待加工工件的气动夹爪6221旋转90度,使得空闲
的气动夹爪6221的输出端呈竖直向下设置并于加工工位3上方等待;s10,加工工位3上的工件打磨完毕后,z轴移动部件612带动气动夹爪6221下降对加工完成的工件进行夹取,夹取完成后,x轴移动部件611带动z轴移动部件612上升;s11,加工工件上升至一定高度后,回转驱动件6213的输出端旋转90 度,使得夹持有待加工工件的气动夹爪6221的输出端呈竖直向下,z轴移动部件612带动气动夹爪6221下降,进行待加工工件的装夹;s12,待加工工件完成装夹后,z轴移动部件612带动气动夹爪6221上升,x轴移动部件611带动z轴移动部件612朝出料工位5移动,并将加工完毕的工件放置于出料工位5;s13,于出料工位5放置完工件后,z轴移动部件612带动气动夹爪6221上升,x轴移动部件611带动z轴移动部件612朝进料工位4移动;s14,气动夹爪6221移动至进料工位4的上方后,限位开关18连通,电磁阀14控制顶升气缸15上升,电磁阀14控制两个顶升气缸15的输出端上升,导向通槽17相对的侧壁将位于进料工位4上的工件顶起供气动夹爪6221夹取;s15,夹取待加工工件完毕后,z轴移动部件612带动气动夹爪6221上升,x轴移动部件611带动z轴移动部件612朝加工工位3移动;x轴移动部件611带动z轴移动部件612向加工工位3移动的过程中,回转驱动件6213带动夹取有待加工工件的气动夹爪6221旋转90度,使得空闲的气动夹爪6221的输出端呈竖直向下设置并于加工工位3上方等待;与此同时,限位开关18断开,电磁阀14控制顶升气缸15复位;s16,参照图6和图8,顶升气缸15复位后,控制柜13控制驱动电机71转动,链条733运转将下个待加工工件送至进料工位4进行等待;与此同时,驱动电机71通过第一同步轴721、第一换向齿轮10以及第二换向齿轮11的传动以带动输送带8与两根链条733反向运转,将出料工位5上的工件送走;s17,重复上述步骤s10-s16,直至链条733上工件全部加工完毕。
60.本实施例的工作原理是:通过移动装夹机构20于进料工位4、出料工位5以及加工工位3三者之间来回移动,实现工件的自动装夹,无需人工对工件进行手动上料或者下料,降低了磨床上下料的安全隐患;再通过进料机构7和输送带8实现工件的自动进出料,极大的减轻了工作人员的负担。
61.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。