一种基于3d扫描的手部参数测量方法
技术领域
1.本发明属于测量技术领域,具体涉及一种基于3d扫描的手部参数测量方法。
背景技术:
2.随着现代科技的发展和生活水平的提高,人们对于服装的要求也越来越高。手套作为服装的一部分,在一些特定场所对于防护手部安全起关键性作用。在现有的防护手套市场中,手套号型多以手长、手宽、手围三种数据为依据,缺少指节长、指围等其他手部数据,且其结构多简单粗糙,关键部位手部尺寸数据与结构设计均与实际人手结构存在一定差异,穿戴后接触舒适性和运动灵活性不高。手套的尺码设计多以手部静态姿势下尺寸为依据,然而手部在做抓握运动时,手部皮肤随抓握姿势的不同随之伸展压缩,以手部静态姿势尺寸为依据,势必会造成穿戴手套后手部在运动过程中出现真实人手与手套不贴合的问题,阻碍人手运动灵活性,影响作业效率。
3.在进行手部尺寸数据收集过程中,通常采用手工测量方法,采用传统手工方法测量虽然方便,但是存在测量工作量大、测量效率低、人工成本高等缺陷。同时,手工测量为接触式测量,易增加被测量者的不适感,测量结果受人为因素影响大,重复性测量困难。
4.随着三维非接触测量技术的发展,3d扫描仪被越来越多的应用到人体测量领域。几秒钟内就可以获取到被测量者表面的三维点云数据并生成网格模型。基于3d扫描的三维非接触测量技术具有非接触式、测量效率高、精度高、测量数据可重复等优点,避免了传统手工测量方法存在的不足,然而在获取三维点云数据模型前,需要对被测量者手部关键部位贴标记点后进行扫描,从而实现人体测量。在实际扫描过程中,要求被测者是静止的,不存在大幅度移动,并且从多个视角扫描,将多视角扫描得到的三维点云数据组合成完整的物体三维点云模型。但在数据测量过程中,其测量结果的精度因手部测量标记点的大小会产生一定波动。
技术实现要素:
5.发明目的:针对现有技术中存在问题或不足,本发明提供一种基于3d扫描的手部参数测量方法。
6.为实现上述发明目的,本发明的实施例提供一种基于3d扫描的手部参数测量方法,其特征在于,包括以下步骤:
7.s1、对被测者手部关键部位贴标记点:将若干3d标记贴纸分别贴在被测量者同一只手的手掌和手背的若干标记点处;
8.s2、获取被测量者手部模型数据:用3d扫描仪根据预设扫描轨迹扫描对被测量者手部伸直状态或握拳状态进行扫描,获得多个待处理数据;从三维模型处理软件中,对扫描所得到的被测量者手部多个待处理数据进行处理,剔除与被测量者手部模型无关的多余数据,根据剩余的数据得到被测量者三维手部模型,将被测量者三维手部模型导入到测量软件中;在测量软件中将扫描得到的多个三维手部模型闭合为封闭模型;
9.s3、根据步骤s2的待处理三维手部封闭模型中各标记点处的三维坐标数据,从待处理三维手部封闭模型中提取由多个标记点形成的测量参数;采用下列公式(1)计算手部关键部位变化率:
10.λ=b/a
ꢀꢀ
(1)
11.式中:λ为手部某部位皮肤变化率,b为握拳时该部位两标记点间距离,a为伸直时该部位两标记点间距离;
12.s4、将步骤s3测量所得的变化率用于弥补手部关键部位运动变化数据的缺失以及防护手套结构设计与开发;并采用变化率的计算公式核实测量方法的实用性。
13.进一步的,所述3d标记贴纸采用直径4mm、厚度0.1mm的3d标记贴纸。
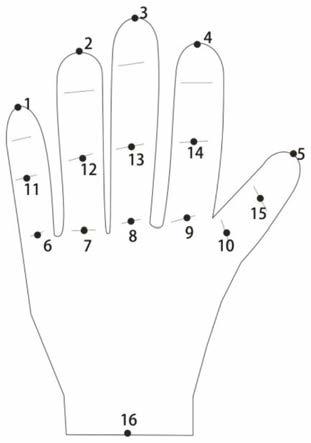
14.进一步的,所述步骤s1中,贴标记点按照以下过程进行:将若干3d标记贴纸分别贴在被测量者手掌各指尖端点、各手指根横纹中点、指中横纹中点、桡骨茎突点与尺骨茎突点掌侧面连线的中点位置处;在同一只手的手背小拇指掌骨关节与掌侧面连线的终点、各掌骨关节点、食指掌骨关节与掌侧面连线的终点、各掌骨关节点上下1cm处、各近节指骨关节点、各近节指骨关节点上下1cm处分别贴上3d标记贴纸。
15.本发明的上述技术方案的有益效果如下:
16.(1)本发明解决了传统手工测量手长、手宽、手围等数据为制作手套尺码的依据,并未考虑到人手在做抓握运动时的皮肤伸展压缩变化量,3d标记贴纸对手部抓握过程中关键变化部位做出标记后获取数据,弥补手部关键部位运动变化数据的缺失。考虑到人手在做抓握运动时的皮肤伸展压缩变化量,3d标记贴纸对手部抓握过程中关键变化部位做出标记后获取数据,弥补手部关键部位运动变化数据的缺失。
17.(2)传统手工测量重复性差且精度低,通过3d扫描仪获取得到三维手部模型,能够实现重复性测量,避免出现误差后重新测量的困难,使用测量软件根据3标记贴纸位置获得的三维坐标数据精度较高。
18.(3)市面上现有手套尺码多反映了人手处于静态伸直时尺寸数据,使用公式(1)计算皮肤各部位变化率,能够更加真实的了解到手部不同部位握拳时皮肤最大变化率,为设计更加贴合真实人手结构的手套提供借鉴数据。
附图说明
19.图1是本发明中手掌面粘贴3d标记贴纸示意图;
20.图2是本发明中手背面粘贴3d标记贴纸示意图。
具体实施方式
21.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合具体实施例进行详细描述。
22.本发明提供了一种经3d扫描后,手部模型各个参数的测量方法,包括以下步骤:
23.(1)对被测量者手部关键部位贴标记点
24.确保被测量者手部无多余装饰物后,使用酒精湿巾擦去被测量者手部汗渍及油污,以保证3d标记贴纸保持良好粘性。待被测量者手部干燥后,采用直径4mm,厚度0.1mm的3d标记贴纸,分别将3d标记贴纸贴纸在被测量者右手手掌各指尖点、各手指根横纹中点、指
中横纹中点、桡骨茎突点和尺骨茎突点掌侧面连线的中点贴3d标记贴纸;在右手手背小拇指掌骨关节与掌侧面连线的终点、各掌骨关节点、食指掌骨关节与掌侧面连线的终点、各掌骨关节点上下1cm处、各近节指骨关节点、各近节指骨关节点上下1cm处贴3d标记贴纸。请参见附图1、2。
25.人手在抓握运动时,皮肤被拉伸和压缩,贴附在皮肤表面的3d标记贴纸因此随之移动。以人手处于静止伸直状态时关节点部位为参考位置,各向上向下标记1cm以观察关节部位伸展变化情况,避免因人手抓握运动过程,关节处标记点移动影响变化率计算结果。
26.(2)获取被测量者手部模型数据
27.采用3d扫描仪根据预设扫描轨迹扫描被测量者多个手部伸直、握拳待处理数据。从三维模型处理软件中对被测量者多个手部待处理数据进行处理,剔除与被测量者手部模型无关的多余数据,得到被测量者三维手部模型,将模型导入到测量软件中。在测量软件中将扫描得到的多个三维手部模型闭合为封闭模型,以避免后续测量出现误差。由于实际扫描过程中,要求被测量者手部是静止的,不存在大幅移动。因此,在扫描前,采用夹持工具被测量者手腕以避免其移动。由于实际扫描过程中,要求被测量者手部是静止的,不存在大幅移动。因此,在扫描前,采用夹持工具被测量者手腕以避免其移动。
28.(3)手部参数测量
29.根据待处理三维手部封闭模型各标记点处的三维坐标数据,从待处理三维手部封闭模型中提取由多个标记点形成的测量参数。采用公式(1)计算手部关键部位变化率:
30.λ=b/a
ꢀꢀ
(1)
31.式中:λ为手部某部位皮肤变化率,b为握拳时该部位两标记点间距离,a为伸直时该部位两标记点间距离。
32.获取手部做不同抓握姿势时手部关键部位变化值,很难直观了解到手部在握拳姿势时具体变化率,采用公式(1)计算手部皮肤变化率,能够直观了解到手部整体变化情况。
33.本发明解决了传统手工测量重复性差且精度低,通过3d扫描仪获取得到三维手部模型,能够实现重复性测量,避免出现误差后重新测量的困难,使用测量软件根据3d标记贴纸位置获得的三维坐标数据精度较高。
34.通过3d扫描仪获取得到三维手部标记模型,使用鼠标取手部标记点间的位置进行距离测量,并与传统测量对比,测量结果如表1所示:
35.表1手部基本测量数据对比与误差分析
[0036][0037][0038]
通过计算伸直与握拳两种姿势下的皮肤形变率,并与传统测量所得计算结果对比,对比结果如表2所示:
[0039]
表2皮肤形变率对比与误差分析
[0040][0041]
表中传统测量与扫描仪测量所得值均为测量三次取均值而得。由传统测量所得手部基本数据相对误差在1~4.9%之间,计算得出的皮肤形变率相对误差在0.39~2.54%之间;使用测量软件所得手部基本数据相对误差在0.07~1.60%之间,皮肤形变率相对误差在0~1.83%之间。本发明所使用测量软件获得手部基本数据精度高,误差较传统测量小,且测量稳定性好。使用扫描仪获得手部三维模型解决了传统测量方法重复测量的困难,实现了可重复测量。
[0042]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。