1.本实用新型属于激光扫描测距技术领域,具体涉及一种超薄长焦单线激光雷达。
背景技术:
2.消费级单线激光雷达广泛应用于agv小车、自动扫地机、智能机器人等自动导航领域,目前市场上的单线激光雷达种类繁多,主要有两种型式:第一种,微型电机通过皮带带动激光测距模组旋转,实现单线雷达扫描效果,其缺点是体积大;第二种,将直流无刷电机与激光雷达壳体集成在一起,定子安装在下壳体,转子安装在上壳体,测距模组再安装在上壳体顶端;电机转动时由上壳体带动激光测距模组旋转,实现扫描,其缺点是焦距短,测距不够远;然而不管是皮带传动还是乐动的集成无刷电机雷达产品,其产品尺寸厚度尺寸都偏大,扫地机、agv小车、智能机器人、无人机等主机厂使用此类产品时,不得不预留较大的雷达安装空间,出来的产品集成度不高,对产品的外观,小型化,集成化有较大影响。
技术实现要素:
3.针对上述不足,本实用新型的目的是提供一种超薄长焦单线激光雷达。
4.本实用新型提供了如下的技术方案:
5.一种超薄长焦单线激光雷达,包括底座及可转动地安装于底座上的转座;转座上安装有电机磁钢,底座上对应于电机磁钢安装有定子线圈;转座上固接有依次电性连接的激光模组、信号处理组件、信号反馈组件;底座上固接有信号接收组件;
6.所述激光模组上端与转座上端平齐;
7.还包括用于测定激光模组旋转方位的测位组件。
8.还包括环形侧围和安装于环形侧围上端的上盖;
9.环形侧围由呈上下布置的透光部和遮光部组成;
10.底座和转座均置于环形侧围内;底座与遮光部固接,并且底座下端高于遮光部下端;转座上端低于透光部上端,激光模组与透光部对齐。
11.所述激光模组包括壳体,壳体上相对称地安装有激光发射组和激光接收组;激光发射组包括激光发射器、发射端全反射镜片、发射端透镜;激光接受组包括激光接收器、接收端全反射镜片、接收端透镜;
12.发射端透镜和激光发射器光路夹角α范围为60
°
~120
°
;
13.接收端全反射镜片和接收端透镜光路夹角β范围为60
°
~120
°
。
14.底座上端居中设有阶梯管状凸起,所述定子线圈安装于阶梯管状凸起外侧;
15.阶梯管状凸起内通过轴承安装有空心轴,空心轴上端与转座固接;
16.信号反馈组件上相对应于空心轴安装有光信号发射器,信号接收组件上相对应于空心轴安装有光信号接收器。
17.所述底座上固接有发射铜线圈,转座上相对应地固接有接收铜线圈,接收铜线圈用于给激光模组、信号处理组件、信号反馈组件供电;
18.射铜线圈、接收铜线圈、空心轴、电机磁钢、定子线圈同轴。
19.所述测位组件包括安装于转座上的反射式光电对管,底座上设有环形城墙齿组。
20.所述测位组件包括安装于转座上的对射式光电传感器,底座上呈环形均布有若干个齿块。
21.本实用新型的有益效果是:
22.本产品通过激光雷达测距模组及集成无刷电机的结构设计,实现了消费级单线激光雷达小型化化和测不远的两种缺点。通过以上方案所生产的单线激光雷达,拥有紧凑小巧的体积,具有超同类产品的探测距离,安装在设备上可以做到空间占有率小,从而减少设备的整体厚度,让设备更容易做到简洁美观大气。
附图说明
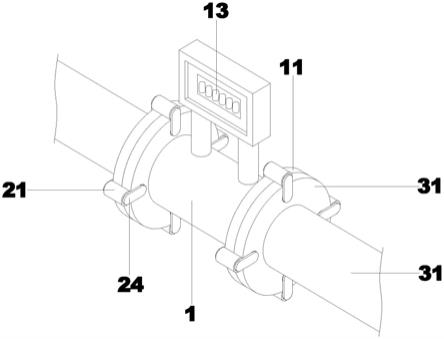
23.图1是本实用新型的结构示意图;
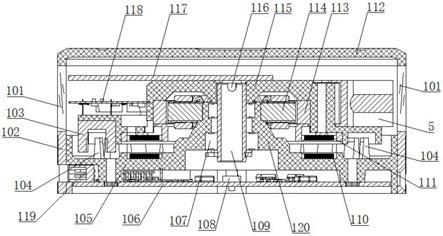
24.图2是本实用新型去除环形侧围和上盖后结构示意图;
25.图3是本实用新型的剖视图;
26.图4是本实用新型的定子线圈安装示意图;
27.图5是底座设有齿块时结构示意图;
28.图6是底座设有环形城墙齿组时结构示意图;
29.图7是激光模组结构示意图。
具体实施方式
30.如图所示,一种超薄长焦单线激光雷达,包括底座105及可转动地安装于底座105上的转座115,底座150和转座115可以通过注塑、铝合金压铸或者铝合金机加工来制作。在转座115上通过过盈配合和胶水粘接安装有电机磁钢113,底座105上对应于电机磁钢113安装有定子线圈114。工作时,控制芯片按照一定的顺序给定子线圈114通电,从而产生磁场,与电机磁钢113的磁场形成吸力和拉力来带动转座115的旋转。
31.转座115上通过螺栓连接安装有依次电性连接的激光模组、信号处理组件118、信号反馈组件117,底座105上通过螺栓连接固定安装有信号接收组件106。转座115旋转,激光模组的信号传输到信号处理组件118处理后,再由信号反馈组件117发射到信号接收组件106。
32.激光模组包括壳体5,壳体5上相对称地安装有激光发射组和激光接收组。激光发射组包括激光发射器2、发射端全反射镜片3、发射端透镜1;激光接受组包括激光接收器6、接收端全反射镜片4、接收端透镜7。工作时,激光发射器2发射红外激光经过发射端全反射镜片3反射光线后由发射端透镜1聚焦照射到被测物8上,激光照射到被测物8上被反射回来,经过接收端透镜7的聚焦,通过接收端全反射镜片4反射光线进入激光接收器6的接收范围,激光接收器6接收到光线后输出信号。发射端透镜1和激光发射器2光路夹角α范围为60
°
~120
°
;接收端全反射镜片4和接收端透镜7光路夹角β范围为60
°
~120
°
。
33.发射端透镜1和激光发射器2的光路焦距l1及夹角α、接收端全反射镜片4和接收端透镜7的光路焦距l2及夹角β可以由壳体5的尺寸来决定,l1及l2可根据透镜焦距合理设置。
34.具体地,底座105上端居中设有阶梯管状凸起120,定子线圈114通过过盈配合安装
于阶梯管状凸起120外侧。阶梯管状凸起120内嵌入轴承107。轴承107内设有空心轴109,空心轴109上端与转座115固定连接。空心轴109可以在注塑时嵌入转座115内,也可以加工为一体式结构。在空心轴109下端套设有铜垫片,并在铜垫片下端安装卡簧,卡簧嵌在空心轴109外侧设有的卡槽内。
35.信号反馈组件117上相对应于空心轴109安装有光信号发射器116,信号接收组件106上相对应于空心轴109安装有光信号接收器108。经处理后的信号通过无线传输到信号接收组件106,再通过与信号接收组件106电性连接的接口119传输。
36.还设有用于测定激光模组旋转方位的测位组件103。具体地,测位组件103包括安装于转座115上的反射式光电对管,底座105上设有环形城墙齿组121。测位组件103也可以包括安装于转座115上的对射式光电传感器,底座105上呈环形均布有若干个齿块104。对射式光电传感器或反射式光电对管旋转时发出光电信号会产生规律的电流,通过提取电路波形的频率可以计算出雷达模组镜头所指向的方位,有了测距模块测得的距离和目前的方位,就可以得到一张360
°
的点云图。agv小车、自动扫地机、智能机器人等设备就可以利用点云图实时了解目前周围的障碍物和自己的方位,从而实现自动导航。
37.为了起到遮尘效果以及减小产品尺寸,还设有环形侧围和安装于环形侧围上端的上盖112。环形侧围由呈上下布置的透光部101和遮光部102组成。底座105和转座115均置于环形侧围内。底座105与遮光部102通过螺栓连接固定连接,并且底座105下端高于遮光部102下端,转座115上端低于透光部101上端,激光模组与透光部101对齐。激光模组上端与转座115上端平齐。
38.为了实现无线供电,在底座105上固定安装有发射铜线圈110,转座115上相对应地固定安装有接收铜线圈111,接收铜线圈111用于给激光模组、信号处理组件118、信号反馈组件117供电,应注意的是,射铜线圈110、接收铜线圈111、空心轴109、电机磁钢113、定子线圈114同轴。
39.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。