1.本实用新型涉及下肢康复训练设备技术领域,尤其涉及一种用于下肢训练的运动反馈装置。
背景技术:
2.市场上现有的下肢康复训练产品分类较多,有康复踏车、坐卧式康复机器人、固定式外骨骼机器人和减重跑台训练机器人等产品。
3.康复踏车没有减重系统,结构不能做负重训练,其运动轨迹为圆型,对早期需要保持关节活动度的患者来说,运动轨迹较为危险。
4.坐卧式康复机器人没有减重系统,不能做负重训练,其运动轨迹可自由设定,适用范围不广,成本高。
5.固定式外骨骼机器人和减重跑台训练机器人不能对昏迷的患者进行早期训练。而且部分康复设备不能根据患者腿长来调节训练结构,以至训练受限。为此提出一种用于下肢训练的运动反馈装置。
技术实现要素:
6.本实用新型为了解决康复训练设备不具备减重设计,不能适应不同康复时期患者训练使用的问题,提供一种用于下肢训练的运动反馈装置,使得患者进行卧姿和站姿训练,可以进行减重康复训练。
7.为实现上述目的,本实用新型所采用的技术方案是:
8.一种用于下肢训练的运动反馈装置,包括移动机架、升降机构、前段框架、中段框架和后段框架,所述移动机架上铰接所述升降机构;
9.所述升降机构包括上下依次布设的矩形中层架、旋转架和“h”形主动梁,中层架四角处和主动梁四角处之间铰接所述旋转架,升降机构通过所述旋转架中部与移动机架铰接以构成平行四边形机构;所述移动机架和主动梁中部之间设置有下电动推杆以驱动升降机构;
10.所述中层架一端铰接有所述前段框架,中层架和前段框架之间还设置有中电动推杆以驱动前段框架翻转;
11.所述中段框架滑动布设在前段框架上,前段框架和中段框架之间设置有上电动推杆以滑动;
12.所述中段框架上铰接所述后段框架,中段框架和后段框架之间设置有左电动推杆以驱动后段框架翻转。
13.进一步地,所述移动机架上设置有呈矩形分布的四个直板;所述旋转架包括主杆以及焊接在主杆一侧中部的“∠”形侧杆,所述主杆上下两端分别与中层架和主动梁铰接,所述侧杆与所述直板铰接以形成铰接点a。
14.进一步地,所述移动机架两侧相对应的两个所述主杆之间还设置有固定杆以增强
升降机构稳定。
15.进一步地,所述中层架一端向外延伸与所述前段框架铰接以形成铰接点b;所述中层架下方设置有安装框,所述安装框与前段框架之间铰接所述中电动推杆。
16.进一步地,所述前段框架上设置有两组脚部训练装置;所述中段框架上铰接有两组腿部训练装置,中段框架上还设置有驱动总成,驱动总成和腿部训练装置之间还设置有驱动臂以带动腿部训练装置翻转。
17.进一步地,每组所述腿部训练装置包括滑动单元和固定单元;所述滑动单元包括竖向布设的固定座、铰接在固定座上方的腿托架以及用于限制腿托架旋转的限位销一,所述固定座下方横向设置有滑轨;所述固定单元包括滑接在滑轨上的滑块、布设在滑块上方的伸缩臂、可调连接在伸缩臂上的固定臂和环座,所述伸缩臂两端面分别设置有前挡板和后压板,所述前挡板上设置有橡胶脚垫以抵在固定座上,所述后压板截面呈“凵”字形围设在滑轨周侧,后压板和固定座之间设置有拉簧;所述固定臂套设在伸缩臂上,固定臂沿伸缩臂长度方向可调连接,固定臂一端设置所述环座;所述环座内键连接有驱动轴,腿部训练装置通过所述驱动轴与中段框架铰接。
18.进一步地,所述驱动总成包括安装板、伺服电机、中空动力底座、电机罩及动力端盖,所述安装板一侧设置伺服电机,安装板另一侧依次设置所述动力端盖、电机罩及动力底座,电机罩内转动设置丝杠套,丝杠套与伺服电机带传动;所述丝杠套内配合有滚珠丝杠,滚珠丝杠一端伸出动力端盖连接有驱动臂,驱动臂一端与驱动轴键连接。
19.进一步地,所述中段框架和后段框架铰接以形成铰接点c。
20.通过上述技术方案,本实用新型的有益效果是:
21.本实用新型结构设计合理,可针对康复所有阶段的患者,能够进行卧姿和站姿训练,可以进行减重训练。通过升降机构和中电动推杆的配合,可实现本装置水平或竖直放置,患者根据需要选择不同的放置姿态,进而选择是否需要减重系统,操作使用灵活,功能多样。
22.本实用新型设置的腿托架可相对于固定座发生偏转,进而降低腿托架的高度,高度降低更容易将患者放到腿部训练装置上,同时可便于腿托架承载患者大腿部,通过限位销一和圆锥销保证了腿托架的良好固定。
附图说明
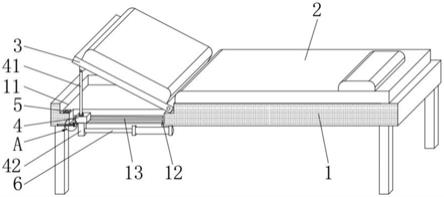
23.图1是本实用新型一种用于下肢训练的运动反馈装置的整体结构示意图。
24.图2是本实用新型一种用于下肢训练的运动反馈装置的升降机构主视图。
25.图3是本实用新型一种用于下肢训练的运动反馈装置的前段框架和中段框架安装示意图。
26.图4是本实用新型一种用于下肢训练的运动反馈装置的中段框架示意图。
27.图5是本实用新型一种用于下肢训练的运动反馈装置的腿部训练装置示意图。
28.图6是本实用新型一种用于下肢训练的运动反馈装置的图5中a-a向剖视。
29.图7是本实用新型一种用于下肢训练的运动反馈装置的腿托架偏转示意图。
30.图8是本实用新型一种用于下肢训练的运动反馈装置的固定单元示意图。
31.图9是本实用新型一种用于下肢训练的运动反馈装置的驱动总成和腿部训练装置
安装示意图。
32.图10是本实用新型一种用于下肢训练的运动反馈装置的驱动总成剖视图。
33.附图中标号为:1为固定座,2为腿托架,201为固定架,202为转接杆,3为限位销一,4为滑轨,5为滑块,6为伸缩臂,7为固定臂,701为主体段,702为限位段,8为环座,9为前挡板,10为后压板,11为橡胶脚垫,12为拉簧,13为塞打螺栓,14为圆锥销,15为卡槽,16为滑槽,17为限位长孔,18为调节孔,19为限位螺栓,20为限位销二,21为伺服电机,22为滚珠丝杠,23为驱动臂,24为驱动轴,25为安装板,26为动力端盖,27为电机罩,28为动力底座,29为同步带,30为转接限位套,31为橡胶限位块,32为移动机架,33前段框架,34为中段框架,35为后段框架,36为中层架,37为旋转架,371为主杆,372为侧杆,38为主动梁,39为下电动推杆,40为中电动推杆,41为上电动推杆,42为左电动推杆,43为直板,44为铰接点a,45为固定杆,46为铰接点b,47为安装框,48为脚部训练装置,49为腿部训练装置,50为铰接点c,51为丝杠套。
具体实施方式
34.下面结合附图对本实用新型的具体实施方式做详细描述:
35.如图1~图10所示,一种用于下肢训练的运动反馈装置,包括移动机架32、升降机构、前段框架33、中段框架34和后段框架35,所述移动机架32上铰接所述升降机构。
36.所述升降机构包括上下依次布设的矩形中层架36、旋转架37和“h”形主动梁38,中层架36四角处和主动梁38四角处之间铰接所述旋转架37,升降机构通过所述旋转架37中部与移动机架32铰接以构成平行四边形机构。
37.升降机构在与移动机架32安装时,所述移动机架32上设置有呈矩形分布的四个直板43。所述旋转架37包括主杆371以及焊接在主杆371一侧中部的“∠”形侧杆372,所述主杆371上下两端分别与中层架36和主动梁38铰接,所述侧杆372与所述直板43铰接以形成铰接点a44。
38.为了便于驱动升降机构动作,所述移动机架32和主动梁38中部之间设置有下电动推杆39以驱动升降机构。为了保证升降机构动作的稳定性,所述移动机架32两侧相对应的两个所述主杆371之间还设置有固定杆45以增强升降机构稳定。
39.所述中层架36一端铰接有所述前段框架33,中层架36和前段框架33之间还设置有中电动推杆40以驱动前段框架33翻转。
40.具体的,所述中层架36一端向外延伸与所述前段框架33铰接以形成铰接点b46。所述中层架36下方设置有安装框47,所述安装框47与前段框架33之间铰接所述中电动推杆40,中电动推杆40倾斜布设,通过中电动推杆40可带动前段框架33翻转倾斜。
41.本实施例中,所述前段框架33上设置有两组脚部训练装置48。所述脚部训练装置48采用本公司已申请的专利:一种用于下肢减重训练的辅助装置,申请公布号为cn112642107a,通过脚部训练装置48可实现对患者脚部进行前屈、后伸、外翻、内收及旋转五个方向的康复运动,功能多样,同时重力传感器可以记录出患者双腿的重力变化时间计算出步幅,并通过双腿的重力变化对比计算出单腿的恢复情况。
42.所述中段框架34滑动布设在前段框架33上,前段框架33和中段框架34之间设置有上电动推杆41以滑动,上电动推杆41可推动中段框架34相对前段框架33滑移,进而适应不
同腿长的患者。
43.本实施例中,所述中段框架34上铰接有两组腿部训练装置49。腿部训练装置49能有效支撑患者大腿部,且可跟随患者大腿进行适当移动。
44.每组所述腿部训练装置49包括滑动单元和固定单元,所述滑动单元可相对于固定单元进行滑动,所述滑动单元包括竖向布设的固定座1、铰接在固定座1上方的腿托架2以及用于限制腿托架2旋转的限位销一3。
45.本实施例中,所述固定座1为方形杆状结构,为了便于腿托架2的安装,所述固定座1上穿设有塞打螺栓13,所述腿托架2通过所述塞打螺栓13与固定座1铰接。
46.所述腿托架2包括上下螺栓连接的u形固定架201和转接杆202,所述塞打螺栓13用于连接固定座1和所述转接杆202,转接杆202以塞打螺栓13为轴心旋转,转接杆202伸出固定座1连接所述固定架201。
47.为了限制腿托架2的旋转,所述固定座1上还穿设有圆锥销14,所述圆锥销14位于固定座1右侧,所述转接杆202侧壁开设有卡槽15,所述卡槽15内卡接所述圆锥销14以限制。在圆锥销14的阻挡作用下,腿托架2仅可向固定座1一侧偏转,本实施例中,腿托架2仅可向固定座1左侧偏转。
48.为了实现腿托架2的固定,所述限位销一3设置在固定座1上,限位销一3头部穿过所述转接杆202以限制,可实现腿托架2的锁止,其不可旋转。通过调整限位销一3即可对腿托架2进行锁止或解锁,使其处于固定状态或可转动状态。
49.所述固定座1下方横向设置有滑轨4,所述滑轨4位于固定座1右侧,滑轨4与固定座1垂直分布。滑轨4在安装时,所述滑轨4穿设在固定座1下方、且与固定座1螺栓连接,进而滑轨4与固定座1连接为一体。
50.所述固定单元包括滑接在滑轨4上的滑块5、布设在滑块5上方的伸缩臂6、可调连接在伸缩臂6上的固定臂7和环座8,所述伸缩臂6螺栓连接在滑块5上方,所述伸缩臂6截面呈“凸”字形,伸缩臂6沿滑轨4长度方向布设。
51.所述伸缩臂6两端面分别设置有前挡板9和后压板10,前挡板9螺栓连接在伸缩臂6端面,所述前挡板9上设置有橡胶脚垫11以抵在固定座1上。
52.前挡板9侧壁螺栓连接所述橡胶脚垫11,橡胶脚垫11为圆台状;滑动单元相对于固定单元滑动时,在橡胶脚垫11的弹性缓冲作用下,避免伸缩臂6直接碰撞固定座1。
53.所述后压板10截面呈“凵”字形围设在滑轨4周侧,所述后压板10与伸缩臂6螺栓连接, 后压板10和固定座1之间设置有拉簧12。
54.具体的,所述后压板10下方和固定座1下方分别设置有螺钉,两个螺钉之间设置所述拉簧12,拉簧12钩在螺钉上,拉簧12位于滑轨4下方。
55.本实施例中,所述固定臂7套设在伸缩臂6上,固定臂7沿伸缩臂6长度方向可调连接,为了实现固定臂7沿伸缩臂6移动,伸缩臂6两侧开设有滑槽16。
56.所述固定臂7包括主体段701和限位段702,所述主体段701套设在伸缩臂6上方,主体段701下平面两侧分别螺栓连接有所述限位段702,限位段702为长条状,限位段702伸入所述滑槽16内以限制。
57.通过限位段702和滑槽16的配合,可实现固定臂7和伸缩臂6的有效连接,防止固定臂7移动时脱落。为了避免固定臂7移动时碰撞固定座1,所述前挡板9上端凸出于伸缩臂6上
平面以限制固定臂7,前挡板9可将固定座1和固定臂7隔离,防止碰撞。
58.为了实现固定臂7相对于伸缩臂6的调节移动,所述伸缩臂6相对应的两侧面分别开设有限位长孔17和若干调节孔18,所述限位长孔17为腰型孔状,限位长孔17沿伸缩臂6长度方向布设。
59.所述固定臂7和限位长孔17之间设置有限位螺栓19,限位螺栓19设置在主体段701上,限位螺栓19穿过主体段701伸入限位长孔17内,限位螺栓19置于限位长孔17内移动,可进一步保证固定臂7与伸缩臂6脱落。
60.所述固定臂7和其中一个调节孔18之间设置有限位销二20,所述限位销二20设置在主体段701上,限位销二20穿过主体段701伸入调节孔18内,调节孔18为圆形孔,从而实现固定臂7相对于伸缩臂6的固定,锁止安全可靠,避免发生脱离风险。
61.在不改变人体位置的情况下,通过调整限位销二20使其与不同位置的调节孔18配合,进而可调整固定臂7相对于伸缩臂6的伸出长度,以适应不同腿长的患者人群。
62.本实施例中,所述固定臂7一端设置所述环座8,环座8内穿设所述驱动轴24,环座8与驱动轴24花键连接;腿部训练装置49通过驱动轴2424与中段框架34铰接。
63.本实施例中,所述中段框架34上还设置有驱动总成,驱动总成和腿部训练装置49之间还设置有驱动臂23以带动腿部训练装置49翻转。
64.具体的,所述驱动总成包括安装板25、伺服电机21、中空动力底座28、电机罩27及动力端盖26,所述安装板25一侧设置伺服电机21,安装板25另一侧依次设置所述动力端盖26、电机罩27及动力底座28,动力端盖26、电机罩27和动力底座28依次连通,电机罩27内转动设置丝杠套51。
65.所述丝杠套51两端设置有转接限位套30,一个转接限位套30通过轴承与动力端盖26连接,另一个转接限位套30通过轴承与动力底座28连接,进而丝杠套51可旋转。
66.为了便于驱动丝杠套51旋转,所述丝杠套51与伺服电机21带传动。具体的,所述丝杠套51和伺服电机21输出轴上均设置有带轮,两个带轮之间设置有同步带29。所述丝杠套51内配合有滚珠丝杠22,滚珠丝杠22一端置于动力底座28内,动力底座28为中空圆柱状,滚珠丝杠22另一端伸出动力端盖26连接有驱动臂23,驱动臂23一端与驱动轴24键连接。
67.驱动总成原理为,伺服电机21通过同步带29带动丝杠套51旋转,进而滚珠丝杠22前、后直线移动,滚珠丝杠22的移动通过驱动臂2323带动驱动轴24旋转,进而腿部训练装置49发生一定翻转。
68.腿部训练装置49在使用时,先拧松限位销一3,向左转动腿托架2,使转接杆202处于水平状态,从而降低了腿托架2的高度,便于患者腿部放入,患者腿部保持弓起状态,最后再将腿托架2向上扶起对准患者大腿固定,腿托架2上安装有绑带,可将患者大腿固定在腿托架2上。
69.通过驱动总成带动本腿部训练装置49偏转一定角度,适应患者腿部的弓起姿态,康复训练时患者大腿部往复移动,进而滑动单元相对于固定单元往复直线滑动。
70.滑动时,滑轨4相对滑块5移动,拉簧12跟随滑轨4同时移动,保证拉簧12的初始位移不变,只在患者大腿带动腿托架2运动时产生形变,保证了拉簧12的使用寿命。同时在拉簧12的助力作用下,保证患者在主动或者被动训练时,避免滑轨4与滑块5运动不畅,对患者造成伤害。
71.本实施例中,所述中段框架34上设置有坐垫,中段框架34上铰接所述后段框架35,后段框架35上设置有靠背,中段框架34和后段框架35之间设置有左电动推杆42以驱动后段框架35翻转。所述中段框架34和后段框架35铰接以形成铰接点c50。
72.本实用新型通过下电动推杆39缩回,可带动升降机构动作:主动梁38向左上平移,中层架36向右下平移,旋转架37处于倾斜状态,进而前段框架33高度相对降低,而后中电动推杆40动作使前段框架33发生翻转,进而使得其倾斜为竖直状态,为了限制前段框架33的翻转,移动机架32上设置有橡胶限位块31。
73.当前段框架33水平放置时,主要面向康复初期的患者,不需要减重系统,主要功能是提升肌力,保持关节活动度,促进自主运动形成,主要以简单的踏步训练为主。
74.当前段框架33竖直放置时,可以面向康复中期和后期的患者,这个时间的患者,主动活动能力增强,出现选择性肌肉活动,可以开展不同屈膝位的主动伸、屈膝运动和踝关节背身运动。这个阶段的患者负重力不强,需要一定的减重系统。
75.本实用新型可针对康复所有阶段的患者,能够进行卧姿和站姿训练,可以进行减重训练。
76.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。