技术特征:
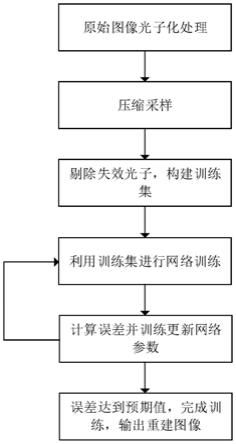
1.一种基于压缩感知对场景信息片上压缩编码采集的方法,其特征在于,包括如下步骤:步骤1,对原始图像数据x进行光子化处理,构建图像在光子瞬态分布下的模型x
′
;步骤2,根据寄存器与传感器感光元件的连接分布,对步骤1所得的光子瞬态分布模型x
′
进行压缩采集,得到压缩采集后的数据y
′
;步骤3,根据传感器的死时间效应和寄存器位数,剔除步骤2压缩采样后的数据y
′
中因死时间效应和寄存器位数饱和失效的光子,得到符合真实场景中压缩采样的光子化模型,光子化模型中光子的数量即为压缩采样后的数据y,构建原始图像数据x与数据y一一对应的训练数据对;步骤4,将步骤3得到的训练数据对输入到卷积神经网络中,对该网络模型进行训练;步骤5,通过损失函数计算重建图像与真实图像的误差,对误差的反向传递更新网络的权重参数和偏置参数;步骤6,重复步骤4~5,对所述卷积神经网络进行训练,直至重建图像与真实图像的误差较小时,完成神经网络的训练,输出压缩采样的重建图像。2.根据权利要求1所述的一种基于压缩感知对场景信息片上压缩编码采集的方法,其特征在于,所述步骤1中,对原始图像数据x进行光子化处理的具体步骤为:步骤11,对原始图像数据x的一个像素值为x
11
像素点,生成一个0到1的随机数,重复这个操作,直到生成的随机数t0小于率参数为x
11
的负指数分布在随机数t0的值,t0即为光子产生的时间间隔;将时间计数t加上光子产生的时间间隔t0,并将此时的时间计数t t0的值由0置为1,表示此时刻存在一个光子;步骤12,重复步骤11的操作,直至时间位置达到传感器的曝光时间长度,即可获得在像素值为x
11
的像素点的光子瞬态分布模型;步骤13,对原始图像数据x的每个像素点重复步骤11和步骤12的操作,则得到整个原始图像在光子瞬态分布下的模型x
′
。3.根据权利要求1所述的一种基于压缩感知对场景信息片上压缩编码采集的方法,其特征在于,所述步骤2中,对光子瞬态分布模型x
′
进行压缩采集的具体步骤为:步骤21,对原始图像的光子瞬态分布模型x
′
按传感器阵列的大小分块,根据压缩感知理论,采用4种不同的寄存器与传感器的连接方式,连接方式要求:(1)每个像素点在4种连接方式中至少与寄存器连接一次,(2)每种连接方式中只有一半的传感器像素点与寄存器连接,连接点随机分布;对属于同一个传感器阵列的像素点进行采样;步骤22,传感器阵列上与寄存器连接的8个像素点其对应的光子瞬态分布模型x
′
按照每个光子达到传感器的时间顺序进行排列,即获得其中一种连接方式下的压缩采集数据,4种寄存器与传感器的连接方式得到的4个数据为一组压缩采集数据,也就是该阵列的压缩采集数据;步骤23,对原始图像光子瞬态分布模型x
′
的每一个块像素阵列重复步骤22的操作,即可获得压缩采集后的数据y
′
。4.根据权利要求1所述的一种基于压缩感知对场景信息片上压缩编码采集的方法,其特征在于,所述步骤3中,剔除压缩采样后的数据y
′
中相邻时间间隔小于死时间的光子,并剔除超过寄存器位数的光子。
技术总结
本发明公开了一种基于压缩感知对场景信息片上压缩编码采集的方法。具体步骤如下:(1)对原始图像光子化处理,构建图像在光子瞬态分布下的模型;(2)对图像的光子化模型压缩采集;(3)根据传感器的死时间效应和寄存器位数,剔除失效的光子,构建采集数据和原始图像的训练数据对;(4)将训练数据对输入到神经网络中,对网络模型进行训练;(5)计算重建图像与真实图像的误差,误差反向传递更新网络参数;(6)重复步骤(4)~(5),直到误差较小时,完成神经网络的训练,输出重建图像。本方法可以实现对场景信息片上的压缩编码采集,提高了传感器填充因子的同时,对噪声也有较好的抑制效果,能够实现质量较高的场景信息采集与重建。现质量较高的场景信息采集与重建。现质量较高的场景信息采集与重建。
技术研发人员:胡雪梅 王鹏
受保护的技术使用者:南京大学
技术研发日:2020.11.09
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。