1.本实用新型涉及环形输送线设备领域,更具体的说是一种用于循环分拣输送线装置。
背景技术:
2.在自动化设备生产企业及相关单位中,往往会建设一些用于展示本公司或本单位的技术实力的应用场景,但实际生产过程中的设备都是流水作业,设备工艺流程结束后就进入下一工艺流程,不能使用同一设备级同一批元件循环展示同一工艺流程,同时设备分拣后有序摆放的元件还需要人工重新打乱,方可重新进入展示流程。
技术实现要素:
3.本实用新型提供一种用于循环分拣输送线装置,能够自动撞击散乱,继而进行循环分拣展示。
4.本实用新型的解决上述问题采用的技术方案为:
5.一种用于循环分拣输送线装置,包括环形输送线、加速输送线、撞击位挡板和分拣部,环形输送线上设有分拣部,环形输送线中嵌入有加速输送线,加速输送线处贯穿设有撞击位挡板,撞击位挡板和环形输送线之间设有第一气缸,分拣部位于加速输送线的后方。
6.所述分拣部包括六轴分拣机器人、停止部ⅰ和停止部ⅱ,环形输送线内部设有用于对元件盒内元件进行分拣的六轴分拣机器人,环形输送线上设有停止部ⅰ和停止部ⅱ,停止部ⅰ和停止部ⅱ依次位于加速输送线的后方。
7.所述停止部ⅰ包括分拣位挡板,环形输送线处贯穿设有分拣位挡板,第二气缸设置在分拣位挡板和环形输送线之间。
8.所述停止部ⅱ包括停止位气缸和停止位挡板,环形输送线处贯穿设有停止位挡板,停止位气缸设置在停止位挡板和环形输送线之间。
附图说明
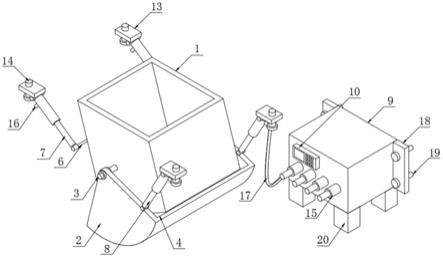
9.图1为用于循环分拣输送线装置的主视图;
10.图2为用于循环分拣输送线装置的侧视图;
11.图3为用于循环分拣输送线装置的主视图的b-b处剖视示意图。
12.图中:
13.环形输送线1;六轴分拣机器人2;加速输送线3;气缸4;停止位挡板5;缓冲橡胶垫6;元件盒7;撞击位挡板8;光电传感器9;分拣位挡板10;螺栓11;元件12。
具体实施方式
14.如图1-3所示:
15.一种用于循环分拣输送线装置,包括环形输送线1、加速输送线3、撞击位挡板8和
分拣部,环形输送线1上设有分拣部,环形输送线1中嵌入有加速输送线3,加速输送线3处贯穿设有撞击位挡板8,撞击位挡板8和环形输送线1之间设有第一气缸,分拣部位于加速输送线3的后方。
16.在使用时,盛装有多个有序摆放的元件12的元件盒7被环形输送线1输送展示,在将该元件盒7输送至加速输送线3处时,由于加速输送线3与环形输送线1之间存在差速,从而对元件盒7进行加速输送,直至元件盒7撞击至撞击位挡板8上,从而使多个有序摆放的元件12便于散乱状态,然后通过控制第一气缸收缩使撞击位挡板8下移至加速输送线3的下方,加速输送线3与环形输送线1继续对于盛装有散乱元件12的元件盒7继续输送,在输送至分拣部处,进行分拣,分拣完成后,使环形输送线1输送内部有序排列多个元件12的元件盒7继续向撞击部方向移动,从而实现循环分拣展示。
17.如图1-3所示:
18.进一步的,所述分拣部包括六轴分拣机器人2、停止部ⅰ和停止部ⅱ,环形输送线1内部设有用于对元件盒7内元件12进行分拣的六轴分拣机器人2,停止部ⅰ和停止部ⅱ依次位于加速输送线3的后方。
19.所述停止部ⅰ包括分拣位挡板10,环形输送线1处贯穿设有分拣位挡板10,第二气缸设置在分拣位挡板10和环形输送线1之间。
20.所述停止部ⅱ包括停止位气缸4和停止位挡板5,环形输送线1处贯穿设有停止位挡板5,停止位气缸4设置在停止位挡板5和环形输送线1之间。
21.环形输送线1上输送有多个元件盒7,在元件盒7撞击至撞击位挡板8上,使其内的元件12杂乱后,该元件盒7被环形输送线1继续输送,在移动至分拣位挡板10处受分拣位挡板10停止移动,同时停止位挡板5也格挡一个空的元件盒7停留在停止位挡板5处,然后通过六轴分拣机器人2将分拣位挡板10处的元件盒7内杂乱的元件12分拣至停止位挡板5处的元件盒7内,有序摆放好;
22.在完成分拣后,停止位气缸4收缩带动停止位挡板5移动至环形输送线1下方,使该处的元件盒7盛装有序的元件12继续随环形输送线1移动展示,在移动至加速输送线3重复上述步骤;
23.在完成分拣后,第二气缸收缩带动分拣位挡板10移动至环形输送线1下方,使该处的已经空的元件盒7继续随环形输送线1移动,在移动至停止位挡板5时,受停止位挡板5格挡,以便于下次作为盛装的元件盒7进行分拣操作。
24.如图1-3所示,进一步的:
25.所述停止位挡板5上设有缓冲橡胶垫6;
26.所述分拣位挡板10上设有缓冲橡胶垫6;
27.所述撞击位挡板8上设有缓冲橡胶垫6。
28.通过在停止位挡板5、分拣位挡板10和撞击位挡板8上设有缓冲橡胶垫6,使元件盒7在与停止位挡板5、分拣位挡板10和撞击位挡板8接触时,通过缓冲橡胶垫6进行缓冲,防止元件盒7发生损坏,进一步防止元件12发生损坏;同时进行降噪。
29.如图1-3所示,进一步的:
30.所述停止位挡板5上设有用于控制停止位气缸4的光电传感器9;
31.所述分拣位挡板10上设有用于控制第二气缸的光电传感器9;
32.所述撞击位挡板8上设有用于控制第一气缸的光电传感器9。
33.通过三个光电传感器9分别对停止位气缸4、第一气缸和第二气缸的控制,使停止位挡板5、分拣位挡板10和撞击位挡板8能够单独进行升降活动,从而使装置在运行时更为顺畅便捷,便于六轴分拣机器人2分拣。
34.其中,环形输送带1和加速输送带3通过螺栓11连接,撞击位挡板8和第一气缸通过螺栓11连接,撞击位挡板8和缓冲橡胶垫6通过螺栓11连接,环形输送带1和第一气缸通过螺栓11连接;
35.分拣位挡板10和第二气缸通过螺栓11连接,分拣位挡板10和缓冲橡胶垫6通过螺栓11连接,环形输送带1和第二气缸通过螺栓11连接;
36.停止位挡板5和停止位气缸4通过螺栓11连接,停止位挡板5和缓冲橡胶垫6通过螺栓11连接,环形输送带1和停止位升降气缸4通过螺栓11连接。
技术特征:
1.一种用于循环分拣输送线装置,其特征在于:包括环形输送线(1)、加速输送线(3)、撞击位挡板(8)和分拣部,分拣部设置在环形输送线(1)上,加速输送线(3)嵌入环形输送线(1)中,撞击位挡板(8)贯穿加速输送线(3),撞击位挡板(8)和环形输送线(1)之间设有第一气缸。2.根据权利要求1所述的一种用于循环分拣输送线装置,其特征在于:所述分拣部包括六轴分拣机器人(2)、停止部ⅰ和停止部ⅱ,六轴分拣机器人(2)设置在环形输送线(1)内部,停止部ⅰ和停止部ⅱ依次设置在环形输送线(1)上且位于加速输送线(3)的后方。3.根据权利要求2所述的一种用于循环分拣输送线装置,其特征在于:所述停止部ⅰ包括分拣位挡板(10),分拣位挡板(10)贯穿环形输送线(1),分拣位挡板(10)和环形输送线(1)之间设有第二气缸。4.根据权利要求2所述的一种用于循环分拣输送线装置,其特征在于:所述停止部ⅱ包括停止位气缸(4)和停止位挡板(5),停止位挡板(5)贯穿环形输送线(1),停止位挡板(5)和环形输送线(1)之间设有停止位气缸(4)。5.根据权利要求4所述的一种用于循环分拣输送线装置,其特征在于:所述停止位挡板(5)上设有缓冲橡胶垫(6)。6.根据权利要求4所述的一种用于循环分拣输送线装置,其特征在于:所述停止位挡板(5)上设有用于控制停止位气缸(4)的光电传感器(9)。7.根据权利要求3所述的一种用于循环分拣输送线装置,其特征在于:所述分拣位挡板(10)上设有缓冲橡胶垫(6)。8.根据权利要求3所述的一种用于循环分拣输送线装置,其特征在于:所述分拣位挡板(10)上设有用于控制第二气缸的光电传感器(9)。9.根据权利要求1中所述的一种用于循环分拣输送线装置,其特征在于:所述撞击位挡板(8)上设有缓冲橡胶垫(6)。10.根据权利要求7所述的一种用于循环分拣输送线装置,其特征在于:所述撞击位挡板(8)上设有用于控制第一气缸的光电传感器(9)。
技术总结
本实用新型涉及环形输送线设备领域,更具体的说是一种用于循环分拣输送线装置,能够自动撞击散乱,继而进行循环分拣展示,该装置包括环形输送线、加速输送线、撞击位挡板和分拣部,环形输送线上设有分拣部,环形输送线中嵌入有加速输送线,加速输送线处贯穿设有撞击位挡板,撞击位挡板和环形输送线之间设有第一气缸,分拣部位于加速输送线的后方;所述分拣部包括六轴分拣机器人、停止部Ⅰ和停止部Ⅱ,环形输送线内部设有用于对元件盒内元件进行分拣的六轴分拣机器人,环形输送线上设有停止部Ⅰ和停止部Ⅱ,停止部Ⅰ和停止部Ⅱ依次位于加速输送线的后方。输送线的后方。输送线的后方。
技术研发人员:杭春进 郭晓楠 王玉 苏宇
受保护的技术使用者:哈尔滨新智达自动化成套装备有限公司
技术研发日:2022.01.05
技术公布日:2022/5/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。