1.本实用新型涉及医疗设备技术领域,具体为新型智能物联网多通道足下垂助行仪。
背景技术:
2.目前市面上或文献记录的助行仪,都是利用功能性电刺激,对下肢行走不便者进行康复治疗,对于刺激的强度以及控制普遍采用单个触发器控制,固定刺激电流强度的形式,使作用肢保持动作的仪器,触发器相当于开关控制刺激的输出停止,再利用单路或多路刺激可使作用肢摆动相诱发踝背屈,校正步态,虽然这种形式初歩实现行走的目的,但是单一固定值电刺激强度在有刺激与无刺激中来回切换,这种刺激包络线下刺激瞬时变化快,而且单一固定波形的脉冲电刺激无法适合所有使用者,容易存在刺激冗余或刺激盲区的现象,无法根据使用者实时步态特征作出调整,陡増跌倒的风险。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了新型智能物联网多通道足下垂助行仪,解决了单一固定波形的脉冲电刺激无法适合所有使用者,容易存在刺激冗余或刺激盲区的现象,无法根据使用者实时步态特征作出调整,陡増跌倒的风险的问题。
5.(二)技术方案
6.为实现上述目的,本实用新型提供如下技术方案:新型智能物联网多通道足下垂助行仪,包括绑带,所述绑带上设置有铁环与主机,绑带上设置有伸缩带,伸缩带上固定连接有绒布,伸缩带上固定连接有魔术贴,绑带上设置有足底垫,足底垫上设置有步态特征调节机构。
7.优选的,所述绑带上的电极贴,主机上电连接有连接电导线,连接电导线不与主机接触的一端与电极贴电连接。
8.优选的,所述步态特征调节机构包括设置在足底垫上的加速度传感器、角速度传感器、压力传感器和同步控制器,足底垫上电连接有足底发射器,足底发射器与主机蓝牙连接。
9.优选的,所述压力传感器为多点薄膜式压力传感器,加速度传感器为压阻式加速度传感器,角速度传感器为三坐标陀螺仪角速度传感器,主机上设置有显示模块和语音提示装置,电极贴为磁扣式电极片。
10.(三)有益效果
11.与现有技术相比,本实用新型提供了新型智能物联网多通道足下垂助行仪,具备以下有益效果:
12.1、该新型智能物联网多通道足下垂助行仪,通过设置的加速度传感器、角速度传感器、压力传感器、同步控制器,使用者佩戴好仪器,在主机连接到电极贴,设置好触发模
式,构成步态信号采集过程,同步控制器调节时序控制电刺激的进程,通过不同传感器检测使用者行走的每个相位,同步控制器动态调整电刺激修正步态,同时内存芯片记录使用情况以及所有的参数,通过物联网模块上传所有数据到云端记录并分析比对,下载更新控制指令、调整方案,因此根据使用者的步态进行实时调整,进而确保使用安全,避免出现跌倒现象。
13.2、该新型智能物联网多通道足下垂助行仪,通过设置的铁环与绑带以及伸缩带,因此可以将该设备与脚部进行固定,通过绑带以及伸缩带缠绕在使用者的腿部,并通过魔术贴对其进行固定,因此使得设备可以与使用者之间形成紧固的连接,避免其出现脱落现象,进而确保设备的正常使用,同时使得设备与使用者之间进行固定时,更加的方便快捷。
14.3、该新型智能物联网多通道足下垂助行仪,通过设置的主机与云平台的连接,仪器上传的由加速度传感器采集的加速度数据,角速度传感器采集的角速度偏转量,压力传感器采集的压力变化量,根据数据对应算法计算得出使用者的步态特征曲线图以及三维模型,再通过大数据对模型进行比对分析,初步得出使用者的步态分析结果供人员参考判断。同时记录仪器的所有参数与使用情况,形成统计图方便对比改善情况。
附图说明
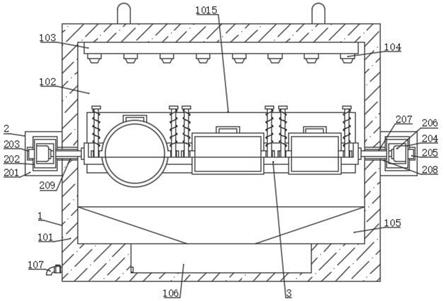
15.图1为本实用新型新型智能物联网多通道足下垂助行仪结构示意主视图;
16.图2为本实用新型电极贴结构示意主视图;
17.图3为本实用新型足底垫结构示意主视图;
18.图4为本实用新型足底垫结构示意主视图。
19.图中:1铁环、2主机、3绑带、4伸缩带、5绒布、6魔术贴、7电极贴、8足底垫、801加速度传感器、802角速度传感器、803压力传感器、804同步控制器、9足底发射器、10连接电导线。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1-4,本实用新型提供新的技术方案:新型智能物联网多通道足下垂助行仪,包括绑带3,绑带3上设置有铁环1与主机2,绑带3上设置有伸缩带4,伸缩带4上固定连接有绒布5,伸缩带4上固定连接有魔术贴6,绑带3上设置有足底垫8,足底垫8上设置有步态特征调节机构。
22.通过设置的铁环1与绑带3以及伸缩带4,因此可以将该设备与脚部进行固定,通过绑带3以及伸缩带4缠绕在使用者的腿部,并通过魔术贴6对其进行固定,因此使得设备可以与使用者之间形成紧固的连接,避免其出现脱落现象,进而确保设备的正常使用,同时使得设备与使用者之间进行固定时,更加的方便快捷。
23.绑带3上的电极贴7,主机2上电连接有连接电导线10,连接电导线10不与主机2接触的一端与电极贴7电连接。
24.进一步的,步态特征调节机构包括设置在足底垫8上的加速度传感器801、角速度传感器802、压力传感器803和同步控制器804,足底垫8上电连接有足底发射器9,足底发射器9与主机2蓝牙连接。
25.通过设置的加速度传感器801、角速度传感器802、压力传感器803、同步控制器804,使用者佩戴好仪器,在主机2连接到电极贴7,设置好触发模式,构成步态信号采集过程,同步控制器804调节时序控制电刺激的进程,通过不同传感器检测使用者行走的每个相位,同步控制器804动态调整电刺激修正步态,同时内存芯片记录使用情况以及所有的参数,通过物联网模块上传所有数据到云端记录并分析比对,下载更新控制指令、调整方案与推送信息等。
26.主机2上设置有显示模块,显示当前仪器的状态与基本参数,主机2上设置有语音提示装置,发出语音提示,电极贴7为磁扣式电极片,压力传感器803为多点薄膜式压力传感器,加速度传感器801为压阻式加速度传感器,角速度传感器802为三坐标陀螺仪角速度传感器
27.进一步的,主机2与云平台通过wifi连接,云平台包括wed管理端、用户端(手机app)以及大数据云端组成,云端特征是仪器上传的由加速度传感器801采集的加速度数据,角速度传感器802采集的角速度偏转量,压力传感器803采集的压力变化量,根据数据对应算法计算得出使用者的步态特征曲线图以及三维模型,再通过大数据对模型进行比对分析,初步得出使用者的步态分析结果供人员参考判断。同时记录仪器的所有参数与使用情况,形成统计图方便对比改善情况。
28.wed管理端特征是通过网络管理云端所有数据,并从云端下载并显示使用者步态分析结果,同时也可调阅实时使用状态、仪器参数与使用记录,使用前后对比改善情况,适时调整康复训练方案。
29.用户端特征是操作界面通过wifi从云端下载并显示使用者实时信息、使用状态、行走步数、行走时间、仪器实时输出参数、步态曲线图等,并可通过用户端手动更改仪器的运行参数以及控制命令。
30.仪器端、用户端、管理端与云端利用物联网进行数据与控制交换,以实现智能识别、知能控制与知能管理,仪器的足底触发器中的压力传感器803用于实时采集使用者脚底的压力分布以及变化量,主机2中的加速度传感器801用于实时采集使用者迈步时踝关节加速度数据,角速度传感器802用于实时采集使用者迈步时膝关节角速度偏转量,mcu根据接收到的实时数据判定使用者歩态的相位,左右脚交替离地和着地、步幅、步长、重心转移、支撑时间、迈腿和蹬腿等动作,跟踪行走过程中步态特征与时相的转接。
31.工作原理:通过设置的加速度传感器801、角速度传感器802、压力传感器803、同步控制器804,使用者佩戴好仪器,在主机2连接到电极贴7,设置好触发模式,构成步态信号采集过程,同步控制器804调节时序控制电刺激的进程,通过不同传感器检测使用者行走的每个相位,同步控制器804动态调整电刺激修正步态,同时内存芯片记录使用情况以及所有的参数,通过物联网模块上传所有数据到云端记录并分析比对,下载更新控制指令、调整方案与推送信息等。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修
改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。