一种车联网下基于用户调度的大规模mimo预编码方法
技术领域:
1.本发明涉及无线通信领域,尤其涉及一种车联网下基于用户调度的大规模mimo预编码方法。
背景技术:
2.对于日益增长的车联网(vehicle-to-everything,v2x)通信需求以及频谱资源的短缺,传统的多输入多输出(multiple input multiple output,mimo)技术已经无法满足现阶段用户对通信服务质量需求,而大规模mimo技术可以增强分集和复用增益,因此,在v2x领域中使用大规模mimo技术,可以为车辆提供高数据速率及高可靠通信。同时,由于v2x系统资源有限,在多用户联合通信中研究如何提高系统传输速率、增加用户分集增益是非常必要的。
3.在多用户和多小区的v2x环境中,设计能够提升大规模mimo系统多用户调度的预编码算法对于v2x通信具有十分重要的意义。采用基于多用户调度的预编码方法可以通过选择优质用户集进行服务,以获取更大的用户分集增益,另外可以在基站端利用不同用户信道变化的特点对各用户做预处理,从而消除信道干扰(co-channel interference,cci),有效的获取更大的用户分集增益、提高系统的传输速率。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种车联网下基于用户调度的大规模mimo预编码方法,在满足用户干扰最小的同时保证了调度用户的信道质量,克服了调度算法中使用大量矩阵分解的操作问题,有效降低系统误码率,提升系统吞吐率。
5.为了实现本发明的上述目的,本发明提供了一种车联网下基于用户调度的大规模mimo预编码方法,其特征在于,包括:
6.s1,建立车联网下的大规模mimo的信道模型;
7.s2,进行联合信道相关性和信道自身条件的多用户调度,获得调度用户集;
8.s3,根据多用户调度的结果进行基于块对角化的预编码,达到消除干扰的目的。
9.所述的一种车联网下基于用户调度的大规模mimo预编码方法,其特征在于,所述s1包括:
10.由于车辆的高速运动,信道特性表现为时变性,产生多普勒效应,于是将多普勒效应引入信道模型与常规毫米波信道合并,则所述第t个时隙的时变几何信道模型可以表示为
[0011][0012]
其中,(
·
)h表示矩阵或向量的共轭转置;是归一化校正因子;n
t
、nr分别表示发射端发射天线数和每个车辆用户的接收天线数;nc表示信道中分簇的数目;nray
表示每个分簇中子信道的个数;标量α
il
(t)表示第i个簇内第l条路径的增益,服从复高斯分布cn(0,1);和分别表示接收和发射天线的阵列导向矢量,即
[0013][0014][0015]
其中,(
·
)
t
表示矢量的转置;和分别表示第i个簇内第l条路径的到达角和离开角;λ为毫米波波长;d为天线阵元间距离;
[0016]
假设功率平均分配,则系统在发射端采用块对角化(block diagonalization,bd)预编码算法时,对于最终选择的r个用户中,则第k个用户可获得的信道容量为
[0017][0018]
其中,b为信道带宽;p为发射总功率;σ2是加性高斯白噪声;det(
·
)表示求矩阵行列式;in表示维度为n的单位矩阵。
[0019]
所述的一种车联网下基于用户调度的大规模mimo预编码方法,其特征在于,所述s2包括:
[0020]
s2-1,根据信道相关性理论,两个矩阵hi和hj组成的拼接矩阵h
i,j
=[hi,hj]的列向量两两正交程度越高时,矩阵hi和hj间的相关性越低;首先将矩阵hi和hj进行向量化,所述矩阵向量化方法为
[0021][0022][0023]
所述用户信道矩阵的相关性的采用矩阵向量化后的皮尔逊系数可表示为
[0024][0025]
其中,coor
ij
(vi,vj)∈[-1,1]的绝对值表示矩阵hi和hj的皮尔逊相关系数;coor
ij
(vi,vj)绝对值取值越大,则表示用户i和用户j之间的信道相关性越高,从而表示两个用户之间的干扰越严重,反之亦然;因此,coor
ij
(vi,vj)的绝对值取值越小时,两个矩阵hi和hj之间的空间相关性就越低。
[0026]
s2-2,贪婪算法是通过计算噪声增强因子lk,选择可以保证当前系统的最大的用户,可以发现,是由集合s中的每个用户的信道增益决定的;因此,用户的噪声增强因子lk也是影响系统容量的一个主要因素,所述根据噪声增强因子来衡量信道自身条件的调度因子表示为
[0027][0028]
其中||
·
||2表示矩阵的2范数;为单位矩阵;
[0029]
根据s2-1和s2-2,将ρkcoor
ks
作为本文多用户调度算法的准则,遍历所有用户选择ρkcoor
ks
最小的用户作为调度用户,直到调度用户数量达到r,得到最优调度用户集,从而将调度用户集的信道作为系统的有效传输信道,获取更好的系统用户增益,其中coor
ks
表示待选用户集中第k个用户与已选用户集s之间的皮尔逊系数。
[0030]
所述的一种车联网下基于用户调度的大规模mimo预编码方法,其特征在于,所述s3包括:
[0031]
所述基于块对角化的预编码方法的核心是进行两次svd分解得到预编码矩阵f,其中用户k的预编码矩阵为其中分别表示为第一次和第二次svd分解后得到的信道矩阵零空间;
[0032]
将所述系统信道矩阵表示为
[0033][0034]
则用户k的补矩阵为
[0035][0036]
对进行svd分解,可以得到
[0037][0038]
其中,和分别是的前和后个右奇异值向量,是的零空间;
[0039]
令对系统等效信道矩阵进行svd分解,得到
[0040][0041]
令得到用户k的预编码矩阵、组合器为
[0042][0043]
wk=uk[0044]
所述块对角化预编码算法的主要目的是寻找用户k(k=1,...,k)的最优预编码矩阵,使其满足从而实现完全消除干扰的目的。
[0045]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0046]
利用块对角化预编码对信道相关性敏感的特点,采用矩阵向量化后的皮尔逊系数来度量用户之间的信道相关性,同时根据用户噪声增强因子定义衡量信道质量的调度因子,在满足最小化信道相关性同时保证选择到优质的信道,从而实现多用户调度。所提方法能够获取更高的用户信道增益,有效降低系统误码率,可适用于v2x通信。
[0047]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变
得明显,或通过本发明的实践了解到。
附图说明
[0048]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0049]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0050]
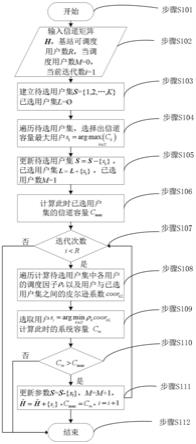
图1是本发明的多用户调度的流程图。
具体实施方式
[0051]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例而已,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0052]
在本技术中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0053]
本发明提出了一种车联网下基于用户调度的大规模mimo预编码方法,综合考虑信道相关性以及信道本身条件两种因素,在满足最小化信道相关性的同时保证选择优质信道,从而实现多用户调度,随后在调度后采用bd预编码消除数据流干扰。
[0054]
结合附图1对本发明进行详细说明,主要包括以下步骤:
[0055]
步骤s101,开始。
[0056]
步骤s102,输入信道矩阵h,用户数k,用户的接收天线数nr,基站可调度用户数r,当前迭代次数i=1。
[0057]
步骤s103,建立待选用户集合s={1,2,...,k},已选用户集合
[0058]
步骤s104,遍历待选用户集s,选择
[0059]
步骤s105,更新待选用户集、已选用户集合和已选用户数s=s-{s1}、l=l {s1}、m=1,其中,hk为第k个用户的信道矩阵。
[0060]
步骤s106,计算此时已选用户的信道容量
[0061]
步骤s107,如果迭代次数i<r进行以下步骤,否则跳转到s111。
[0062]
步骤s108,遍历待选用户集s中的每一个用户,计算各用户的调度因子ρk及用户与已选用户集s之间的皮尔逊系数coor
kl
。
[0063]
所述用户与已选用户集s之间的皮尔逊系数coor
kl
以及各用户的调度因子ρk计算方式分别为:
[0064]
根据信道相关性理论,两个矩阵hi和hj组成的拼接矩阵h
i,j
=[hi,hj]的列向量两两正交程度越高时,矩阵hi和hj间的相关性越低;首先将矩阵hi和hj进行向量化,所述矩阵向量化方法为
[0065][0066][0067]
所述用户信道矩阵的相关性的采用矩阵向量化后的皮尔逊系数可表示为
[0068][0069]
其中,coor
ij
(vi,vj)∈[-1,1]的绝对值表示矩阵hi和hj的皮尔逊相关系数;coor
ij
(vi,vj)绝对值取值越大,则表示用户i和用户j之间的信道相关性越高,从而表示两个用户之间的干扰越严重,反之亦然;因此,coor
ij
(vi,vj)的绝对值取值越小时,两个矩阵hi和hj之间的空间相关性就越低。
[0070]
贪婪算法是通过计算噪声增强因子lk,选择可以保证当前系统的最大的用户,可以发现,是由集合s中的每个用户的信道增益决定的;因此,用户的噪声增强因子lk也是影响系统容量的一个主要因素,所述根据噪声增强因子来衡量信道自身条件的调度因子表示为
[0071][0072]
其中,||
·
||2表示矩阵的2范数;为单位矩阵;
[0073]
步骤s109,选取满足的用户,并且计算此时的系统容量cm;
[0074]
步骤s110,如果当前系统容量cm>c
max
则继续执行以下步骤,否则跳转到步骤s111;
[0075]
步骤s111,更新待选用户集s=s-{si},已选用户集c
max
=cm,用户调度数m=m 1,i=i 1
[0076]
步骤s111,结束。
[0077]
本实施例中,通过执行以上步骤可以得到调度用户集的信道矩阵进而可以使用基于块对角化的预编码方法进行接下来的处理。
[0078]
本实施例中,使用块对角化预编码方法的核心是进行两次svd分解从而得到预编码矩阵f,则用户k的预编码矩阵可表示为其中分别表示为第一次和第二次svd分解后得到的信道矩阵零空间。
[0079]
将得到的调度用户集的信道矩阵表示为
[0080][0081]
则用户k的补矩阵为
[0082][0083]
对进行svd分解,可以得到
[0084][0085]
其中,和分别是的前和后个右奇异值向量,是的零空间,
[0086]
令对系统等效信道矩阵进行svd分解,得到
[0087][0088]
令得到用户k的预编码矩阵、组合器为
[0089][0090]
wk=uk[0091]
使用块对角化预编码算法的主要目的是寻找用户k(k=1,...,k)的最优预编码矩阵,使其满足从而实现本实施例中完全消除干扰的目的。
[0092]
至此,得到了本实施例中预编码方法消除干扰的结果。
[0093]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0094]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。