1.本技术涉及智能物流的技术领域,尤其是涉及一种智能化的装车方法及系统。
背景技术:
2.随着经济的发展以及科技的进步,各行各业的智能控制水平得到了的显著的提高。比如当下的货运装车,由以往的人工装车逐渐发展到了机械手自动将运输架上的货物安放到车上,显著提高了工作效率,同时降低了劳动力的消耗。
3.但是目前的自动装车系统智能程度相对较低,装车系统进行装车的过程中需要司机调整装货的车辆入库的角度,对于司机而言需要较高的控制要求,从而导致装车的难度增大。
技术实现要素:
4.为了降低装车的难度,本技术提供一种智能化的装车方法及系统。
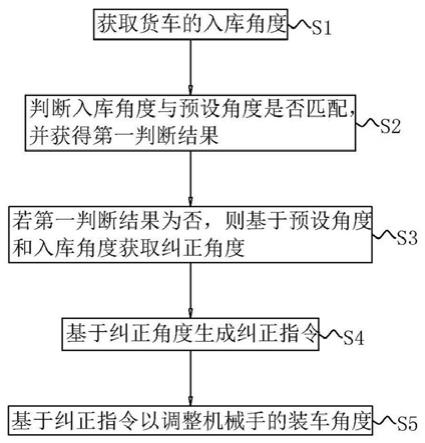
5.第一方面,本技术提供一种智能化的装车方法,采用如下的技术方案:一种智能化的装车方法,包括:获取货车的入库角度;判断所述入库角度与预设角度是否匹配,并获得第一判断结果;若所述第一判断结果为否,则基于所述预设角度和所述入库角度获取纠正角度;基于所述纠正角度生成纠正指令;基于所述纠正指令以调整机械手的装车角度。
6.通过采用上述技术方案,判断货车的入库角度与预设角度是否匹配,获得第一判断结果,能够判断能否正常对货车进行装货。如果第一判断结果为否,证明货车的入库角度有较大偏差,此时根据预设角度和入库角度获取纠正角度,然后根据纠正角度生成纠正指令以调整机械手的装车角度,进而控制机械手按照调整之后的装车角度进行装车,能够尽可能的保证装车角度的准确性,从而提高装车的质量,降低装车的难度。
7.作为优选,在所述基于所述纠正角度生成纠正指令之前还包括:获取对比角度;判断所述对比角度与所述入库角度是否匹配,并获得第二判断结果;若所述第二判断结果为否,则基于所述对比角度和所述预设角度获取复查角度,作为新的所述纠正角度;若所述第二判断结果为是,则进行下一步。
8.通过采用上述技术方案,判断对比角度与入库角度是否匹配,并获得的人判断结果,能够进一步判断入库角度是否准确;如果第二判断结果为否,证明入库角度大概率测量发生错误,此时根据对比角度也预设角度获取复查角度,并作为新的纠正角度。接着根据新的纠正角度生成新的纠正指令以调整机械手的装车角度,并根据新的装车角度控制机械手装车;如若第二判断结果为是,证明入库角度正确,此时继续按照先获得的装车角度以控制
机械手装车。从而通过上述的方式,能够进一步验证入库角度的测量是否正确,进而进一步提高检测的准确性,提高装车的稳定性和安全性。
9.作为优选,所述获取对比角度包括如下步骤:获取货车的入库后的图像,作为入库图像;基于所述入库图像获取预设于地面上的入库标记线;基于所述入库图像获取货车的轮廓线;获取所述轮廓线和所述入库标记线之间的夹角,作为所述对比角度。
10.通过采用上述技术方案,根据入库图像获取标记线和轮廓线,两者之间的位置相对固定,即使拍摄入库图像的设备发生一定的倾斜,拍摄的入库标记线与轮廓线之间的夹角发生变化的误差也较小,从而能够提高对比角度的稳定性。
11.作为优选,在所述获取货车的入库角度之后还包括:获取运输架与货车之间的间隔距离;判断所述间隔距离是否大于间隔阈值,并获得第三判断结果;若所述第三判断结果为否,则生成距离报警信息。
12.通过采用上述技术方案,判断间隔距离是否大于间隔阈值,获得第三判断结果,能够判断货车是否会碰撞运输架。如果第三判断结果为否,证明货车将要碰到运输架,此时生成距离报警信息能够及时对货车司机进行提醒,从而提高装车过程中的安全性。
13.作为优选,在所述基于所述纠正指令以调整机械手的装车角度之后还包括:获取货车的车厢的实际长度;获取预设的货车的车厢长度,作为预设长度;判断所述预设长度是否等于所述实际长度,并获得第四判断结果;若所述第四判断结果为否,则基于所述预设长度和所述实际长度获取调整距离;基于所述调整距离调整所述机械手的装车距离。
14.通过采用上述技术方案,判断预设长度是否等于实际长度,并获得第四判断结果,能够判断货车是否当前的装车系统匹配。如果第四判断结果为否,证明不匹配,此时根据预设长度与实际长度获取调整距离,并根据调整距离调整机械手的装车距离,使机械手能够适应当前的货车,从而能够顺利装车,进而使装车系统能够适用不同长度的货车,进而提高系统的适用范围。
15.作为优选,在所述获取货车的车厢的实际长度之后还包括:获取所述机械手装车时的最大移动长度;判断所述最大移动长度是否大于所述实际长度,并获得第五判断结果;若所述第五判断结果为否,则生成告警信息。
16.通过采用上述技术方案,判断机械手装车时的最大移动距离是否大于实际长度,并获得第五判断结果,能够判断机械手能否适用当前的货车。如果第五判断结果为否,证明机械手大概率不能适用当前的货车,此时生成告警信息,提醒相关的工作人员及时进行查看,从而进一步提高装车的安全性。
17.作为优选,所述若所述第五判断结果为否,则生成告警信息包括如下步骤:当所述第五判断结果为否时,基于所述最大移动长度和所述实际长度获取长度差值;
判断所述长度差值是否小于长度阈值,并获得第六判断结果;若所述第六判断结果为是,则基于所述最大移动长度调整所述机械手的装车距离;若所述第六判断结果为否,则生成所述告警信息。
18.通过采用上述技术方案,当第五判断结果为否时,根据最大移动长度和实际长度获取长度差值,然后判断长度差值是否需要长度阈值,并获得第六判断结果,能够进一步判断当前货车是否能够适用。如果第六判断结果为是,证明当前货车可以适用,此时根据最大移动长度调整机械手的装车距离,从而方便装车;如果第六判断结果为否,证明当前货车不适用,此时生成告警信息。进而通过上述的方式,能够进一步提高对货车是否适用判断的准确性,进而提高装车系统的适用范围。
19.作为优选,所述长度阈值为获取的货物的实际宽度。
20.通过采用上述技术方案,根据货物的实际宽阔调整长度阈值,能够进一步提高装车系统的适用性。
21.第二方面,本技术提供一种智能化的装车系统,采用如下的技术方案:一种智能化的装车系统,包括:入库角度获取模块,用于获取货车的入库角度;角度判断模块,用于判断所述入库角度与预设角度是否匹配,并获得第一判断结果;纠正角度获取模块,当所述第一判断结果为否时,用于基于所述预设角度和所述入库角度获取纠正角度;指令生成模块,用于基于所述纠正角度生成纠正指令;角度调整模块,用于基于所述纠正指令以调整机械手的装车角度。
22.通过采用上述技术方案,入库角度获取模块获取货车的入库角度之后,发送给与其相连的角度判断模块,角度判断模块判断入库角度与预设角度是否,获得第一判断结果,并将第一判断结果发送给与其相连的纠正角度获取模块。当第一判断结果为否时,纠正角度获取模块根据预设角度和入库角度获取纠正角度,并发送给与其相连的指令生成模块。指令生成模块根据纠正角度生成纠正指令,并发送给与其相连的角度调整模块。角度调整模块根据纠正指令调整机械手的装车角度,从而方便进行装车。能够尽可能的保证装车角度的准确性,从而提高装车的质量,降低装车的难度。
23.作为优选,还包括:第一长度获取模块,用于获取货车的车厢的实际长度;第二长度获取模块,用于获取预设的货车的车厢长度,作为预设长度;长度判断模块,用于判断所述预设长度是否等于所述实际长度,并获得第四判断结果;距离获取模块,当所述第四判断结果为否时,用于基于所述预设长度和所述实际长度获取调整距离;距离调整模块,用于基于所述调整距离调整所述机械手的装车距离。
24.通过采用上述技术方案,第一长度获取模块获取货车的车厢的实际长度,并发送给与其相连的长度判断模块。第二长度获取模块,获取预设的货车的车厢长度,作为预设长
度,并发送给与其相连的长度判断模块。长度判断模块判断预设长度是否等于实际长度,获得第四判断结果,并将第四判断结果发送给与其相连的距离获取模块。当第四判断结果为否时,距离获取模块根据预设长度与实际长度获取调整距离,并发送给与其相连的距离调整模块,距离调整模块根据调整距离调整机械手的装车距离。从而能够顺利装车,进而使装车系统能够适用不同长度的货车,进而提高系统的适用范围。
25.综上所述,本技术包括以下至少一种有益技术效果:判断货车的入库角度与预设角度是否匹配,能够判断能否正常对货车进行装货。如果不匹配,证明货车的入库角度有较大偏差,此时根据预设角度和入库角度获取纠正角度,然后根据纠正角度生成纠正指令以调整机械手的装车角度,进而控制机械手按照调整之后的装车角度进行装车,能够尽可能的保证装车角度的准确性,从而提高装车的质量,降低装车的难度。
附图说明
26.图1是本技术实施例提供的一种智能化的装车方法的整体流程示意图;图2是本技术一个实施例中步骤s11至步骤s13的流程示意图;图3是本技术一个实施例中步骤s21至步骤s24的流程示意图;图4是本技术一个实施例中步骤s1之后即步骤s31至步骤s33的流程示意图;图5是本技术一个实施例中步骤s5之后即步骤s41至步骤s45的流程示意图;图6是本技术一个实施例中步骤s41之后即步骤s51至步骤s53的流程示意图;图7是本技术一个实施例中步骤s61至步骤s64的细流程示意图;图8是本技术实施例提供的一种智能化的装车系统的整体结构框图;图9是本技术一种智能化的装车系统的一个实施例中调整机械手的装车距离的结构框图。
27.附图标记说明:1、入库角度获取模块;2、角度判断模块;3、纠正角度获取模块;4、指令生成模块;5、角度调整模块;6、第一长度获取模块;7、第二长度获取模块;8、长度判断模块;9、距离获取模块;10、距离调整模块。
具体实施方式
28.以下结合附图1-图9对本技术作进一步详细说明。
29.本技术实施例公开一种智能化的装车方法。
30.参照图1,智能化的装车方法包括:s1.获取货车的入库角度;s2.判断入库角度与预设角度是否匹配,并获得第一判断结果;s3.若第一判断结果为否,则基于预设角度和入库角度获取纠正角度;s4.基于纠正角度生成纠正指令;s5.基于纠正指令以调整机械手的装车角度。
31.具体来说,首先获取货车的入库角度,获取方式可以通过激光角度仪测量后获得,其中激光角度仪可以安装在运输架上,入库角度为激光角度仪测得的激光与货车侧边之间
的角度。
32.接着判断入库角度与预设角度是否匹配,并获得第一判断结果,即判断货车进入到装载货物的车库之后,货物能否正常装载在货车上。其中,入库角度与预设角度的匹配方式可以采用如下方式,即入库角度为一个测得的固定值,预设角度为预设的一个范围值,通过判断入库角度的大小是否落在预设角度的范围值内,从而判断是否匹配。如果入库角度的大小位于预设角度的上限值和下限值之间,则匹配,否则不匹配。
33.当然判断入库角度与预设角度是否匹配的判断方式也可以是,入库角度和预设角度均为一个固定值,然后获取入库角度与预设角度的差值,然后判断该差值是否位于一个预设的上限阈值与下限阈值之间。若是,则入库角度与预设角度匹配,否则,则是不匹配。
34.因此,第一判断结果就包括入库角度与预设角度匹配以及入库角度与预设角度不匹配两种结果。如果第一判断结果为是,证明入库角度与预设角度匹配,此时可以正常进行后续的货物装载步骤;如果第一判断结果为否,证明入库角度与预设角度不匹配,此时如果要通过机械手自动装载货物,就需要调整机械手的装车角度。因而,此时根据预设角度和入库角度获取纠正角度。
35.获取纠正角度过程中,当预设角度为范围值,且入库角度小于预设角度的下限值时,此时纠正角度可以是用下限值减去入库角度获取的值,当入库角度大于预设角度的上限值时,纠正角度可以是用入库角度减去上限值获取的值。
36.当预设角度为固定值,且入库角度大于预设角度时,入库角度减去预设角度获取的差值为对比值。当该对比值小于预设的下限阈值时,利用预设的上限阈值与下限阈值之间的任意值减去对比值,获取的值即为纠正角度;当该对比值大于预设的上限阈值时,利用对比值减去上限阈值与下限阈值之间的任意值,获取的即为纠正角度。
37.然后根据纠正角度生成纠正指令,纠正指令包括纠正角度,接着根据纠正指令调整机械手的装车角度。例如当入库角度小于预设角度时,证明货车的入库角度不足,此时机械手的装车角度就需要增加相应的纠正角度的大小,从而对货车入库的角度补足;反之,则需要机械手的装车角度减去相应的纠正角度的大小,从而消除货车入库角度的盈余。
38.最后机械手根据调整之后的装车角度讲货物安放到货车的车厢上,从而实现自动装车的同时,能够尽可能的保证装车角度的准确性,降低货物发生侧翻情况发生的可能性,从而提高装车的质量,降低装车的难度。
39.参照图2,装车过程中,角度仪可能因为外部的撞击等原因导致角度发生改变,因而会导致入库角度测量存在较大误差,因此,为了尽可能降低该种情况发生所造成的影响,在另一个实施例中,步骤s4即基于纠正角度生成纠正指令之前还包括如下步骤:s11.获取对比角度;s12.判断对比角度与入库角度是否匹配,并获得第二判断结果;s13.若第二判断结果为否,则基于对比角度和预设角度获取复查角度,作为新的纠正角度。
40.具体来说,首先获取对比角度,对比角度可以是通过设置不易触碰的激光角度仪测量获得。将对比角度与入库角度进行对比,判断二者是否匹配,并获得第二判断结果,从而能够进一步判断入库角度的准确性。其中,对比角度与入库角度的匹配方式可以是获取对比角度与入库角度的差值,然后判断差值是否位于一个预设的范围值内,即判断这个差
值是否大于等于预设的范围值的最小值且小于等于预设的范围值的最大值。如果该差值位于范围值内,证明对比角度与入库角度匹配,否则,则是不匹配。
41.如果第二判断结果为是,证明角度仪的测量角度正常,此时可以继续进行步骤s4即基于纠正角度生成纠正指令;如果第二判断结果为否,证明角度仪的测量角度大概率发生错误,此时根据对比角度和预设角度获取复查角度,作为新的纠正角度,复查角度的获取方式与当预设角度为固定值时,通过预设角度和入库角度获取纠正角度的方式相同。
42.接着根据新的纠正角度生成新的纠正指令,然后根据纠正指令调整机械手的装车角度。最后机械手根据调整之后的装车角度将货物安放到货车的车厢上,从而实现自动装车的同时,尽可能的保证装车角度的准确性,且能够进一步验证入库角度的测量是否正确,进而有效提高检测的准确性,提升装车的稳定性和安全性。
43.参照图3,进一步的,为了提高对比角度的稳定性,在另一个实施例中,步骤s11即获取对比角度包括如下步骤:s21.获取货车的入库后的图像,作为入库图像;s22.基于入库图像获取预设于地面上的入库标记线;s23.基于入库图像获取货车的轮廓线;s24.获取轮廓线和入库标记线之间的夹角,作为对比角度。
44.具体来说,首先通过设置在货物装载的车库内的摄像头拍摄获取货车入库后的图像,作为入库图像。车库的地面上设置有入库标记线,设置方式可以参照停车位的停车线的设置方式,入库图像拍摄的过程中,能够清晰的拍摄入库标记线。
45.获取入库图像之后,根据图像算法获取入库标记线以及货车的轮廓线,然后根据相应的图像算法获取轮廓线与入库标记线之间的夹角,该夹角是指货车长度方向的轮廓线与入库标记线长度方向的线条之间的夹角,然后将该夹角作为对比角度。
46.通过摄像机等设备拍摄的图像,入库图像获取标记线和轮廓线,两者之间的位置相对固定,即使拍摄入库图像的设备发生一定的倾斜,拍摄的入库标记线与轮廓线之间的夹角发生变化的误差也较小,从而能够提高对比角度的稳定性。
47.参照图4,进一步的,为了进一步提高装货过程中的安全性,在另一个实施例中,步骤s1即获取货车的入库角度之后还包括如下步骤:s31.获取运输架与货车之间的间隔距离;s32.判断间隔距离是否大于间隔阈值,并获得第三判断结果;s33.若第三判断结果为否,则生成距离报警信息。
48.具体来说,货车进行倒车入库过程中,获取运输架与货车之间的间隔距离,也就是运输架与货车车尾之间的距离,获取方式可以通过激光测距仪测量获得。
49.接着判断间隔距离是否大于间隔阈值,并获得第三判断结果,即判断货车倒车过程中是否会发生与运输架发生碰撞的情况。其中,间隔阈值为预设的车尾与运输架之间的安全距离。
50.当第三判断结果为是时,证明此时没有碰撞的危险,此时不需要进行任何的提示操作;当第三判断结果为否时,证明间隔距离过小,可能会发生碰撞事故,此时生成距离报警信息,并将距离报警信息输出,从而对货车司机等工作人员进行提醒,进而能够提高装车过程中的安全性。且,距离报警信息可以是灯光闪烁,也可以是蜂鸣报警,或者其他的警报
方式。
51.参照图5,在实际的装货过程中,可能存在装货的货车与平时使用的货车的尺寸大小不同的情况,此时就需要对机械手的装车距离进行调整。因此,在另一个实施例中,步骤s5即基于纠正指令以调整机械手的装车角度之后还包括如下步骤:s41.获取货车的车厢的实际长度;s42.获取预设的货车的车厢长度,作为预设长度;s43.判断预设长度是否等于实际长度,并获得第四判断结果;s44.若第四判断结果为否,则基于预设长度和实际长度获取调整距离;s45.基于调整距离调整机械手的装车距离。
52.具体来说,当机械手的装车角度调整之后,获取货车的车厢的实际长度,也就是获取货车安放获取的部分的长度,获取方式可以是通过传感器测量,也可以通过拍摄照片然后按照照片的比例计算获得,还可以是通过人工输入的方式。
53.接着获取预设的货车的车厢长度,作为预设长度,预设长度为预存的车厢长度,该预设长度与车库相互匹配,即预设长度的货车的车厢位于车库内时,车厢不会过短也不会过长。然后判断预设长度是否等于实际长度,并获得第四判断结果,即判断当前的货车是否与该车库适配。
54.且判断预设长度是否等于实际长度过程中,实际长度与预设长度之间可以存在一定的误差,该误差包括上限值和下限值,该误差值的大小可以根据实际的情况进行设置,若实际长度与预设长度的差值在误差值的范围内,即判断预设长度与实际长度相等。
55.如果第四判断结果为是,即预设长度等于实际长度,此时无需再次对机械手进行调整,直接进行装车即可;如果第四判断结果为否,证明预设长度与实际长度不等。此时根据预设长度和实际长度获取调整距离,该调整距离为预设长度与实际长度之间的差值,且所有的差值均取其正值。
56.然后根据调整距离调整机械手的装车距离,其中,装车距离是指机械手从抓取货物到移动到车厢的最远距离。如果预设长度等于实际长度,此时的装车距离为初始值,当预设长度大于实际长度时,此时调整之后的装车距离为装车距离的初始值减去调整距离后获得;当预设长度小于实际长度时,此时调整之后的装车距离为装车距离的初始值加上调整距离后获得,且每次调整并装车之后,装车距离重新调整为初始值。
57.从而通过上述的方式,机械手能够适应当前的货车,从而能够顺利装车,进而使装车系统能够适用不同长度的货车,进而提高装车系统的适用范围。
58.参照图6,对于过长的货车来说,如果机械手不能移动到货车车厢靠近车头的一端,当货车发生急刹车等紧急停车的情况时,车厢的货物极大可能发生滑动,进而发生翻倒,容易造成货物的损坏,所以需要进一步的判断。因此,在另一个实施例中,步骤s41即获取货车的车厢的实际长度之后还包括如下步骤:s51.获取机械手装车时的最大移动长度;s52.判断最大移动长度是否大于实际长度,并获得第五判断结果;s53.若第五判断结果为否,则生成告警信息。
59.具体来说,获取实际长度之后,获取机械手装车时的最大移动长度,该最大移动长度是指机械手从运输架上抓取货物向货车上运输过程中,能够移动的最远距离,此最远距
离可以通过系统预设并存储,然后从系统中进行获取。
60.接着判断最大移动长度是否大于实际长度,并获得第五判断结果,即判断机械手能否移动到当前货车车厢靠近车头的一端,进而判断车厢中的货物是否会发生滑动、翻倒等情况。
61.如果第五判断结果为是,证明机械手能够将货物移动到车厢靠近车头的一端,使货物贴近车的边缘,此时可以正常装货,能够减小由于货车发生急刹车导致货物发生滑动进而导致翻倒情况发生的可能性。
62.如果第五判断结果为否,证明机械手不能移动到车厢靠近车头的一端,此时大概率证明货物会发生因为急刹车导致的滑动、翻倒的情况,此时就生成告警信息,并发送给相关的工作人员,从而对工作人员进行提醒示警。进而通过上述的方式能够进一步提高装车过程中的安全性,同时尽可能保证货物运输过程中的质量。其中,提示方式可以是灯光、声音报警等方式中的至少一种。
63.参照图7,进一步的,在实际的判断过程中,可能存在车厢的长度仅仅比最大移动长度大10厘米、15厘米或者20厘米等情况,该种情况的判断需要结合货物的宽度进一步判断。因此,在另一个实施例中,步骤s53即若第五判断结果为否,则生成告警信息包括如下步骤:s61.当第五判断结果为否时,基于最大移动长度和实际长度获取长度差值;s62.判断长度差值是否小于长度阈值,并获得第六判断结果;s63.若第六判断结果为是,则基于最大移动长度调整机械手的装车距离;s64.若第六判断结果为否,则生成告警信息。
64.具体来说,当第五判断结果为否时,此时根据最大移动长度与实际长度获取长度差值,即获取最大移动长度与实际长度之间的差值,且取其正值,即为长度差值。然后判断长度差值是否小于长度阈值,并获得第六判断结果,其中,长度阈值为获取的货物的实际宽度。货物的实际宽度是指货物放置到车厢时,货物沿车厢的长度方向的距离,即为货物的实际宽度。
65.判断长度差值是否小于长度阈值,即能够判断当货车发生急刹车,导致货物发生滑动之后,货物是否会从车厢靠近车头一端的侧壁与货物之间的空隙落下。如果第五判断结果为是,证明货物不会从空隙落下,此时证明货物大概率不会发生翻倒,此时可以进行装车,所以,此时根据最大移动长度调整机械手的装车距离,从而控制机械手按照最大移动长度进行移动装车。
66.如果第六判断结果为否,此时证明货物大概率会从空隙落下,导致货物发生翻转或撞击,大概率会导致货物发生损坏,此时生成告警信息。进而通过上述的方式,能够进一步提高对货车是否适用判断的准确性,进而提高装车系统的适用范围。
67.本技术实施例一种智能化的装车方法的实施原理为:判断货车的入库角度与预设角度是否匹配,获得第一判断结果,能够判断能否正常对货车进行装货。如果第一判断结果为否,证明货车的入库角度有较大偏差,此时根据预设角度和入库角度获取纠正角度,然后根据纠正角度生成纠正指令以调整机械手的装车角度,进而控制机械手按照调整之后的装车角度进行装车,能够尽可能的保证装车角度的准确性,从而提高装车的质量,降低装车的难度。
68.本技术实施例还公开一种智能化的装车系统,能够达到如上述一种智能化的装车方法同样的技术效果。
69.参照图8,智能化的装车系统包括:入库角度获取模块1,用于获取货车的入库角度;角度判断模块2,用于判断入库角度与预设角度是否匹配,并获得第一判断结果;纠正角度获取模块3,当第一判断结果为否时,用于基于预设角度和入库角度获取纠正角度;指令生成模块4,用于基于纠正角度生成纠正指令;角度调整模块5,用于基于纠正指令以调整机械手的装车角度。
70.具体来说,入库角度获取模块1获取货车的入库角度之后,发送给与其相连的角度判断模块2,角度判断模块2判断入库角度与预设角度是否,获得第一判断结果,并将第一判断结果发送给与其相连的纠正角度获取模块3。
71.当第一判断结果为否时,纠正角度获取模块3根据预设角度和入库角度获取纠正角度,并发送给与其相连的指令生成模块4。指令生成模块4根据纠正角度生成纠正指令,并发送给与其相连的角度调整模块5。
72.角度调整模块5根据纠正指令调整机械手的装车角度,从而方便进行装车。能够尽可能的保证装车角度的准确性,从而提高装车的质量,降低装车的难度。
73.参照图9,在另一个实施例中,上述智能化的装车系统还包括:第一长度获取模块6,用于获取货车的车厢的实际长度;第二长度获取模块7,用于获取预设的货车的车厢长度,作为预设长度;长度判断模块8,用于判断预设长度是否等于实际长度,并获得第四判断结果;距离获取模块9,当第四判断结果为否时,用于基于预设长度和实际长度获取调整距离;距离调整模块10,用于基于调整距离调整机械手的装车距离。
74.具体来说,第一长度获取模块6获取货车的车厢的实际长度,并发送给与其相连的长度判断模块8。第二长度获取模块7,获取预设的货车的车厢长度,作为预设长度,并发送给与其相连的长度判断模块8。长度判断模块8判断预设长度是否等于实际长度,获得第四判断结果,并将第四判断结果发送给与其相连的距离获取模块9。
75.当第四判断结果为否时,距离获取模块9根据预设长度与实际长度获取调整距离,并发送给与其相连的距离调整模块10,距离调整模块10根据调整距离调整机械手的装车距离。从而能够顺利装车,进而使装车系统能够适用不同长度的货车,进而提高系统的适用范围。
76.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。