技术特征:
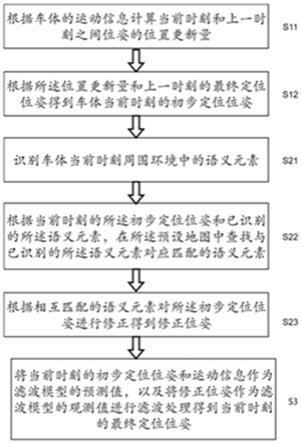
1.一种车辆定位方法,其特征在于,包括:初始化步骤:根据车身多个环视相机提供的感知语义信息和地图进行语义匹配,通过匹配语义求取位姿进行定位初始化,再通过初始化确定对应车在地图的精准位置;初步定位步骤:根据车体的运动信息计算当前时刻和上一时刻之间位姿的位置更新量;根据所述位置更新量和上一时刻的最终定位位姿得到车体当前时刻的初步定位位姿;位姿修正步骤:再次识别车体当前时刻周围环境中的语义元素;根据当前时刻的所述初步定位位姿和已识别的所述语义元素,在预设地图中查找与已识别的所述语义元素对应匹配的语义元素,并根据相互匹配的语义元素对所述初步定位位姿进行修正得到修正位姿;滤波步骤:将当前时刻的所述初步定位位姿和运动信息作为滤波模型的预测值,以及将所述修正位姿作为滤波模型的观测值进行滤波处理得到当前时刻的最终定位位姿;所述得到修正位姿的步骤包括:获取所述语义元素的角点;将k时刻初步定位位姿进行旋转和平移,得到预设地图上与所述角点对应的转换点,所述角点与所述转换点一一对应;根据所述角点和所述转换点构建误差函数;再通过列文伯格-马夸尔特方法进行迭代估计,得到修正位姿。2.如权利要求1所述的车辆定位方法,其特征在于,所述位姿修正步骤中的根据当前时刻的所述初步定位位姿和已识别的所述语义元素,在所述预设地图中查找与已识别的所述语义元素对应匹配的语义元素,包括:将当前时刻的所述初步定位位姿以预设半径的搜索范围在所述预设地图中进行遍历查找,直到查找到与识别出的所述语义元素相匹配的语义元素。3.如权利要求1所述的车辆定位方法,其特征在于,所述位姿修正步骤中的根据当前时刻的所述初步定位位姿和已识别的所述语义元素,在所述预设地图中查找与已识别的所述语义元素对应匹配的语义元素,包括:识别车体当前时刻周围环境中的分区语义元素;所述分区语义元素为用于将所述预设地图划分为多个不同区域的语义元素;确定出已识别的所述分区语义元素在所述预设地图中的区域,并将该区域作为当前目标区域;在所述当前目标区域中查找与已识别的所述分区语义元素对应匹配的语义元素。4.如权利要求1所述的车辆定位方法,其特征在于,所述初步定位步骤包括:根据感知到的语义信息,选择获取车体当前时刻运动信息中的角速度和线速度的方式,并获取角速度和线速度;角速度和线速度的获取方式至少包括:a.车身传感器获取的角速度和线速度;b.由轮编码器推算获取的角速度和线速度;c.视觉匹配估计的角速度和线速度;根据角速度、线速度以及上一时刻位姿计算当前时刻和上一时刻的位置更新量;其中,所述上一时刻位姿根据车体上一时刻所述角速度、所述线速度以及上上一时刻的位姿计算得到。
5.如权利要求1所述的车辆定位方法,其特征在于,所述位姿修正步骤中的根据当前时刻的所述初步定位位姿和已识别的所述语义元素,在所述预设地图中查找与已识别的所述语义元素对应匹配的语义元素,包括:将已识别的所述语义元素所在的图像坐标系的信息进行坐标转换;根据所述当前时刻的所述初步定位位姿对转换后的信息进行预处理;在所述预设地图中查找与已预处理的所述语义元素对应匹配的语义元素。6.如权利要求1所述的车辆定位方法,其特征在于,所述运动信息包括角速度和线速度;所述滤波步骤,包括:将当前时刻的所述初步定位位姿、所述角速度和所述线速度作为滤波模型的预测值,以及将所述修正位姿作为滤波模型的观测值进行滤波处理得到当前时刻的最终定位位姿。7.如权利要求1-6中任意一项所述的车辆定位方法,其特征在于,所述运动信息包括角速度和车速;所述角速度为车体imu获得的角速度;所述车速根据车体轮编码器的信息计算获得。8.如权利要求1-6中任意一项所述的车辆定位方法,其特征在于,在所述位姿修正步骤中的所述识别车体当前时刻周围环境中的语义元素,包括:获取所述车体的环视相机拍摄的照片;在所述照片中识别出所述语义元素。9.如权利要求1-6中任意一项所述的车辆定位方法,其特征在于,所述语义元素包括如下中的至少一个:地面标识和车库位;所述地面标识包括如下中的至少一个:箭头、减速带、楼层号和道路标线;所述车库位包括如下中的至少一个:库位线和库位号。10.如权利要求1所述的车辆定位方法,其特征在于,还包括:初始化步骤:识别车体在库位附近时周围环境中的初始化语义元素,在预设地图中查找与已识别的初始化语义元素相匹配的语义元素;在露天场所时,通过gps信息确认位置信息,根据查找到的语义元素确定出车体的初始位姿;所述初始化语义元素与所述预设地图上的语义元素一一对应;所述初步定位步骤,包括:根据车体当前时刻的运动信息计算当前时刻和上一时刻之间的位置更新量,根据所述位置更新量和上一时刻精确定位的位姿得到所述车体的当前时刻的所述初步定位位姿。11.一种车辆定位系统,其特征在于,被配置成执行权利要求1-10中任意一项所述的车辆定位方法。12.一种自动泊车方法,其特征在于,包括车辆定位步骤和车辆控制步骤;所述车辆定位步骤,采用上述权利要求1-10中任意一项所述的车辆定位方法对车辆定位;所述车辆控制步骤,根据车辆定位的位置信息和目标位置信息控制车辆移动至目标位置。13.一种自动泊车系统,其特征在于,包括车辆定位模块和车辆控制模块;
所述车辆定位模块,用于对车辆进行定位并发送至所述车辆控制模块,所述车辆定位模块采用权利要求11所述的车辆定位系统;所述车辆控制模块,用于根据目标位置信息和所述车辆定位模块发送的定位信息控制所述车辆移动至目标位置。14.一种存储介质,其特征在于,存储介质上存储有指令,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至10中任意一项所述的车辆定位方法或者权利要求12所述的自动泊车方法。
技术总结
本发明提供了一种车辆定位方法及系统、自动泊车方法及系统、存储介质,根据语义信息和预设地图进行位姿匹配,实现定位初始化;根据车体的运动信息计算当前时刻和上一时刻之间位姿的位置更新量;根据位置更新量和上一时刻的最终定位位姿得到车体当前时刻的初步定位位姿;根据当前时刻的初步定位位姿和已识别的语义元素,在预设地图中查找与已识别的语义元素对应匹配的语义元素,并根据相互匹配的语义元素对初步定位位姿进行修正得到修正位姿;将当前时刻的初步定位位姿和运动信息作为滤波模型的预测值,以及将修正位姿作为滤波模型的观测值进行滤波处理得到当前时刻的最终定位位姿。不仅成本低,而且精度高且速度快,精度能够达到厘米级定位。够达到厘米级定位。够达到厘米级定位。
技术研发人员:牛小宁 王曦 王若瑜 邱芸
受保护的技术使用者:天津天瞳威势电子科技有限公司
技术研发日:2022.04.01
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。