1.本发明属于计算机领域,特别涉及一种基于深度学习的农作物灾害鉴别分级方法及装置。
背景技术:
2.玉米作物是全球最重要的粮食之一,在中国,玉米的种植面积和总产量均超过了水稻、小麦等其他粮食作物,是我国的第一大粮食作物。其中北方地区的玉米在中国的玉米产业中有着重要的地位。在传统的玉米主要生产区,由于气温和降水分布等变化,干旱成为影响玉米产量的重要因素。准确地估算农作物灾害的受灾程度和受灾面积是解决很多农业问题的前提。从遥感领域来看,农业灾害的识别与分析一直是开放性问题。研究者们付出了巨大的努力,通过高光谱卫星影像、高光谱机载影像、高分辨率卫星影像等多重手段获取数据,来定性或定量识别地表种植物的受灾情况。然而,卫星与机载等数据来源具有无法避免的客观缺陷。卫星影像受天气、过境时间、空间分辨率低等多种因素限制,在灾害发生时无法及时对地表情况进行监测,更无法进行细节化的灾情检测。机载影像虽然灵活,但存在经济成本高、天气敏感、飞行空域需要审批等问题。
3.现有技术中,在期刊文章《generating 3d hyperspectral information with lightweight uav snapshot cameras for vegetation monitoring:from camera calibration to quality assurance》中,helge aasen,bolten a等人进行了系列研究,他们通过多角度多光谱的无人机拍摄从而实现针对大麦作物的三维建模。首先,对无人机搭载的系列相机进行地表辐射测量和校准,并结合基于运动的结构(structure from motion)方法与多光谱信息建立3d高光谱信息,获得了一个包括高光谱的数字表面模型。该模型与地表覆盖物发出和反射的高光谱信息相关联。进一步,他们结合了选定的植被指数(vegetation indices,vis)和3d模型中的植株高度信息,以估算夏季大麦实验中的生物量。在期刊文章《estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle(uav)》中,zarco-tejada,p.j.等人利用无人机获取高分辨率高光谱图像,来估算葡萄园中的叶片类胡萝卜素含量。并在十二个葡萄园中两个研究地块进行测试与验证,以确保叶片生物化学和葡萄树生理条件的适当可变性。
4.近年来,随着人工智能领域的不断发展,深度神经网络(deep neural networks,dnn)在计算机视觉领域的很多任务中均有着良好的表现,效果相比于传统方法有了很大的提升。通过监督学习的方法训练深度卷积神经网络,可以有效地提取图像中的纹理信息,完成多种视觉任务。因此深度学习也被引用到农业作物相关问题研究中。在期刊文章《estimation of leaf area index in onion(allium cepa l.)using an unmanned aerial vehicle》中,juan i.c
ó
rcoles等人通过神经网络来从无人机高分辨率影像来获取洋葱作物的冠层覆盖面积,并证明叶面积指数(lai)与冠层的覆盖有关,它们对作物与环境之间的相互作用有强相关性。
5.目前,农作物干旱评价主要利用多光谱数据,多光谱数据的主要来源有卫星数据和机载数据。卫星数据容易获得但是空间分辨率较低而且数据的质量不稳定,云和气雾有时会遮挡住卫星的视野,过于强烈的日照可能会使某一区域的光线过饱和,设备本身出现的状况也有可能会影响到图像信息采集。因此,通过基于卫星影像的指数方法识别旱灾有很大的局限性。机载(有人、无人)多光谱数据分辨率高、可根据需要搭载多光谱摄像机,且采集时间灵活,但价格比较昂贵。同时,指数方法容易受到一些因素(比如光照)的影响导致偏差,而且以像元为单位的指数计算无法准确得到区域内作物的整体情况。
技术实现要素:
6.有鉴于此,为了解决上述现有问题之一,本发明提供的基于深度学习的农作物灾害鉴别分级方法及装置,可达到实际生产中需要的精度,又能节约对灾害审查评估阶段的时间和人力物力成本。
7.第一方面,本发明提供基于深度学习的农作物灾害鉴别分级方法,所述方法包括:
8.采集农作物灾害图像数据作为预训练数据和测试数据,所述农作物灾害图像数据为四通道多光谱图像;
9.对所述预训练数据进行预处理得到带标注信息的训练数据,所述训练数据的标注步骤包括提取每张农作物灾害图像数据中目标农作物所在区域的归一化植被指数ndvi,所述归一化植被指数ndvi的计算公式为:ndvi=(nir-r)/(nir r),其中nir指遥感图像的近红外波段的反射率,r指红色波段的反射率,对所述归一化植被指数ndvi进行均值平滑处理后确定每张农作物灾害图像数据中目标农作物所在区域的灾害等级标签,灾害等级标签至少包括未受灾农作物、轻度灾害农作物、中度灾害农作物、重度灾害农作物中两项;
10.利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,利用所述测试数据对所述农作物灾害鉴别分级模型进行测试,所述农作物灾害鉴别分级模型采用deeplabv3 为基础网络架构,采用se-restnext-50作为骨干网络,在上采样部分的所有上采样操作均使用转置卷积方法,损失函数采用jaccard损失函数;
11.获取待鉴别地区的图像数据,输入至所述训练好的农作物灾害鉴别分级模型得到所述待鉴别区域的农作物灾害鉴别分级结果。
12.作为一种可选的方案,所述对所述归一化植被指数ndvi进行均值平滑处理后确定每张农作物灾害图像数据中目标农作物所在区域的灾害等级标签,包括
13.在所述农作物灾害图像数据上对计算出的归一化植被指数ndvi进行均值平滑操作,公式如下:
[0014][0015][0016]
其中,q为以点(x,y)为中心的3
×
3区域中属于玉米类别的像素点的集合,num为q中元素的个数。
[0017]
作为一种可选的方案,所述方法还包括:
[0018]
在t为60时,对归一化植被指数ndvi平滑处理60轮。
[0019]
作为一种可选的方案,所述训练数据采用512
×
512像素的图像,重叠16像素,所述训练数据和测试数据的比例为4:1。
[0020]
作为一种可选的方案,所述利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,包括:
[0021]
所述农作物灾害鉴别分级模型使用tensorflow框架,adam作为优化器,初始学习率为0.001,每当训练损失值的当前最小值在最近8个epoch内没有变化时,学习率下降0.5倍,25个epoch损失值的当前最小值没有变化或训练超过500个时期epoch数时,停止训练,并保存损失loss最小的网络权重,完成训练过程得到训练好的农作物灾害鉴别分级模型。
[0022]
作为一种可选的方案,所述测试数据和所述训练的目标农作物所在区域不相同。
[0023]
作为一种可选的方案,所述测试数据采用交叠裁剪的方法,在对所述农作物灾害图像数据进行切片之前将每个边缘镜像复制50像素作为镜像填充,推理过程使用有重叠的滑动窗口切片作为输入,边缘重叠100像素,裁剪512
×
512大小的图片输入网络,网络推理输出尺寸也为512
×
512,舍弃边缘的50像素,留下中间区域的尺寸为412
×
412,并将结果拼接起来。
[0024]
作为一种可选的方案,农作物灾害图像数据为rgb nir多光谱图像,所述方法还包括:
[0025]
在训练过程中,使用所述农作物灾害图像数据中的rgb三个通道作为所述农作物灾害鉴别分级模型的输入,nir通道用于辅助标签的制作。
[0026]
第二方面,本发明还提供一种基于深度学习的农作物灾害鉴别分级装置,包括:
[0027]
采集模块,用于采集农作物灾害图像数据作为预训练数据和测试数据,所述农作物灾害图像数据为四通道多光谱图像;
[0028]
预处理模块,用于对所述预训练数据进行预处理得到带标注信息的训练数据,所述训练数据的标注步骤包括提取每张农作物灾害图像数据中目标农作物所在区域的归一化植被指数ndvi,所述归一化植被指数ndvi的计算公式为:ndvi=(nir-r)/(nir r),其中nir指遥感图像的近红外波段的反射率,r指红色波段的反射率,对所述归一化植被指数ndvi进行均值平滑处理后确定每张农作物灾害图像数据中目标农作物所在区域的灾害等级标签,灾害等级标签包括未受灾农作物、轻度灾害农作物、中度灾害农作物、重度灾害农作物、其他;
[0029]
训练模块,用于利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,利用所述测试数据对所述农作物灾害鉴别分级模型进行测试,所述农作物灾害鉴别分级模型采用deeplabv3 为基础网络架构,采用se-restnext-50作为骨干网络,在上采样部分的所有上采样操作均使用转置卷积方法,损失函数采用jaccard损失函数;
[0030]
识别模块,用于获取待鉴别地区的图像数据,输入至所述训练好的农作物灾害鉴别分级模型得到所述待鉴别区域的农作物灾害鉴别分级结果。
[0031]
第三方面,本发明还提供一种计算机设备,包括:
[0032]
至少一个处理器;以及
[0033]
与所述至少一个处理器通信连接的存储器;其中,
[0034]
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上述的基于深度学习的农作物灾害鉴别分级方法。
[0035]
本发明提供的基于深度学习的农作物灾害鉴别分级方法及装置,采用全卷积神经网络在较为精确的样本上进行训练,即可达到实际生产中需要的精度,又能节约对农作物灾害审查评估阶段的时间和人力物力成本。并通过改进了所使用的神经网络模型结构,使得其表现在农作物灾害的考察评估性能上有了进一步的提升。进一步地,充分考虑了在实际生产过程中,图像获取的低成本和便捷性,采用rgb影像作为该方法的必要输入,比以往方法更加便捷和低成本。
附图说明
[0036]
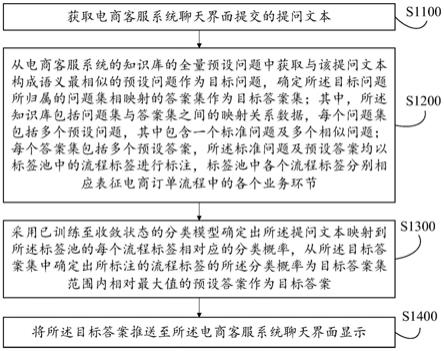
图1是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法的整体实现流程图;
[0037]
图2是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法的地面真实标签生成示意图;
[0038]
图3是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法中测试数据的裁剪拼接示意图;
[0039]
图4a是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法中测试结果对应原图的示意图;
[0040]
图4b是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法中测试结果的标签示意图;
[0041]
图4c是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级方法中测试结果的示意图;
[0042]
图5是本发明实施例中提供的基于深度学习的农作物灾害鉴别分级装置的结构框图。
具体实施方式
[0043]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0044]
本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固
有的其它步骤或单元。
[0045]
结合图1所示,本发明实施例中提供一种基于深度学习的农作物灾害鉴别分级方法,所述方法包括:
[0046]
s101、采集农作物灾害图像数据作为预训练数据和测试数据,所述农作物灾害图像数据为四通道多光谱图像。
[0047]
四通道多光谱图像可以通过无人机进行航拍获得,本实施例中,农作物灾害图像数据是由dji经纬-m600-pro无人机拍摄的四通道(rgb nir)多光谱图像,无人机搭载了由optosky光子公司生产的高光谱成像仪atp9000。该无人机图像采集高度为100米,空间分辨率约为20cm。农作物灾害图像数据采集时间为2018年8月中旬,地点在某市附近的a村和b村。图像的空间分辨率约为20厘米。我们选取了a村四张11600
×
12000像素的图像作为深度神经网络的训练数据,选择b村的12000
×
24000像素的图像作为测试数据。选取数据的标准为只受到旱灾而没有受到风灾、虫灾等其他自然灾害的区域,同时要保证各类别的占比尽量均匀且样本之间具有一定的地形差异。另外选择获取的图像中的rgb三通道作为神经网络的输入,近红外nir通道用于辅助标签的制作,需要说明的是,无人机的型号和高光谱成像仪可以根据需要选择,对于图像尺寸可以根据需要进行灵活选择,在此不做限定。
[0048]
无人机搭载的rgb影像采集是一种比较容易获得且价格便宜的数据采集方式,其中只包含图像纹理信息而不包含用于植被指数计算的近红外等波段。无人机影像已经应用于很多农业问题的解决中,并取得了很好的效果。
[0049]
s102、对所述预训练数据进行预处理得到带标注信息的训练数据,所述训练数据的标注步骤包括提取每张农作物灾害图像数据中目标农作物所在区域的归一化植被指数ndvi,所述归一化植被指数ndvi的计算公式为:ndvi=(nir-r)/(nir r),其中nir指遥感图像的近红外波段的反射率,r指红色波段的反射率,对所述归一化植被指数ndvi进行均值平滑处理后确定每张农作物灾害图像数据中目标农作物所在区域的灾害等级标签,灾害等级标签至少包括未受灾农作物、轻度灾害农作物、中度灾害农作物、重度灾害农作物中两项。
[0050]
具体地,在农作物灾害图像数据上对计算出的归一化植被指数ndvi进行均值平滑操作,公式如下:
[0051][0052][0053]
其中,q为以点(x,y)为中心的3
×
3区域中属于玉米类别的像素点的集合,num为q中元素的个数。
[0054]
本实施例中,归一化植被指数ndvi作为一种被广泛接受并用于表征植物的生长状况的植被指数,归一化植被指数(ndvi)的具体计算公式为:
[0055]
ndvi=(nir-r)/(nir r);
[0056]
其中nir指遥感图像的近红外波段的反射率,r指红色波段的反射率。
[0057]
如图2所示,以农作物为玉米为例,对于数据的标注过程进行介绍,根据农作物灾害图像数据对训练数据进行标注,训练标签分为“未受灾玉米”、“轻度旱灾玉米”、“中度旱
灾玉米”、“重度旱灾玉米”、“其他”等五类。标签的制作流程如下:
[0058]
s1、可以通过目视解译的方式将玉米作物与其他无关本方法的作物划分出来。
[0059]
s2、利用多光谱无人机影像中的红色波段(r)和近外红色波段(nir)计算的到玉米区域的归一化植被指数,即归一化植被指数ndvi。
[0060]
s3、在图像上的玉米区域对计算出的归一化植被指数(ndvi)进行均值平滑操作,公式如下:
[0061][0062][0063]
其中,q为以点(x,y)为中心的3
×
3区域中属于玉米类别的像素点的集合,num为q中元素的个数。我们的方法中采用平滑处理60轮后(即t=60)的结果进行进一步的标签制作。
[0064]
s4、根据由专家评估得到的归一化植被指数ndvi边界值划分是否受灾与受灾程度。由于农作物自身影像,诸如叶片反光等,数值归一化植被指数(ndvi)存在误差,所以我们对不同地块分别进行评估,取动态的边界值来进行划分,地块归一化植被指数(ndvi)所对应的受灾程度如表1所示。
[0065]
编号平滑后的ndvi指数受灾程度00.5至1未受灾10.42至0.5轻度旱灾20.36至0.42中度旱灾30至0.36重度旱灾
[0066]
表1
[0067]
s5、检查标签与原图像,对不合理的标签进行修正处理。
[0068]
从左到右分别为原始影像、ndvi灰度图、平滑60轮的ndvi灰度图、标签。标签是在60轮模糊的基础上由专家评估得到的,而在40-80轮之间改变模糊轮次的过程中,每个灾害等级的总面积几乎没有变化,这说明可接受的模糊轮次应是一个较大的范围值。同时这个标准是灵活的,在本发明方法实验中,希望观察并评估村子整体的受灾情况,所以采用较大的模糊轮次使标签更加宏观,而如果在一个关注作物的任务中,则可以降低模糊轮次,这样产生的标签甚至可以显现出不同作物个体间的受灾差异。
[0069]
s103、利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,利用所述测试数据对所述农作物灾害鉴别分级模型进行测试,所述农作物灾害鉴别分级模型采用deeplabv3 为基础网络架构,采用se-restnext-50作为骨干网络,在上采样部分的所有上采样操作均使用转置卷积方法,损失函数采用jaccard损失函数。
[0070]
结合图3和4a、4b、4c所示,本实施例中,农作物灾害鉴别分级模型的网络模型采用以deeplabv3 为基础的网络架构,deeplabv3 引入编码
–
解码结构,,它的encoder的主体是带有空洞卷积的dcnn,可以采用常用的分类网络如resnet,然后是带有空洞卷积的空间金
字塔池化模块(atrous spatial pyramid pooling,aspp)),主要是为了引入多尺度信息;相比deeplabv3,v3 引入了decoder模块,其将底层特征与高层特征进一步融合,提升分割边界准确度。从某种意义上看,deeplabv3 在dilatedfcn基础上引入了ecoderdecoder的思路。此基础上针对农作物灾害图像数据的数据集进行了优化和改进,其中,对上采样结构进行了优化,在解码层中,需要上采样以提高低维特征的分辨率。通常使用的上采样方式有近邻插值(nearest neighbor interpolation)、双线性插值(bi-linear interpolation)、双立方插值(bi-cubic interpolation)等上采样方式。这些方法构建的上采样层可能会丢失一些信息,并且无法通过训练来自适应的调整权重。在本发明实施例中使用转置卷积(transposed convolution)来代替传统的上采样方法,并且,在网络中,采用jaccard来替代传统的cce损失函数,jaccard损失函数l
jaccard
公式如下:
[0071][0072]
为了同时增强网络的泛化性,选择的测试数据与训练数据的地点存在着一定的地形差异。在a村分别选取了12000
×
24000大小的影像作为测试数据。为了解决卷积核影响边缘信息的问题,采用交叠(overlap)裁剪的方法,为边缘提供大量的上下文信息。在对测试图像进行切片之前将每个边缘镜像复制50像素作为padding填充,在测试数据切片时采用有重叠的滑动窗口,边缘重叠100像素,裁剪512
×
512大小的图片输入网络,将预测得到的512
×
512的结果每个边缘分别裁剪50像素,得到412
×
412的结果图后拼接起来。
[0073]
将训练数据重叠16像素裁剪成512
×
512大小共2400张,按照4:1的比例随机分成训练数据与测试数据,批次大小(batch size)设置为16。使用tensorflow框架,adam作为优化器,初始学习率为0.001,每当训练的损失值的当前最小值在最近8个epoch(训练轮次)内没有变化时,学习率下降0.5倍。25个epoch(训练轮次)损失值的当前最小值没有变化或训练超过500个epoch(训练轮次)数时,停止训练,并保存loss(损失函数值)最小的网络权重。最后,我们将训练保存好的网络模型应用到测试数据,获得的测试评价指标和结果如表2和图4a、4b、4c所示。
[0074]
类别precisionrecallf1_scorejaccard index未受灾玉米0.83050.92750.87630.7798轻度旱灾玉米0.93740.99370.96470.9318中度旱灾玉米0.92830.96690.94720.8998重度旱灾玉米0.92940.91830.92380.8584其他0.95490.69610.80520.6739over all0.91610.90050.90340.8287
[0075]
表2测试结果指标
[0076]
s104、获取待鉴别地区的图像数据,输入至所述训练好的农作物灾害鉴别分级模型得到所述待鉴别区域的农作物灾害鉴别分级结果。
[0077]
需要说明的是,对于图像数据标注和分级模型的训练可以预先进行,对此不做限定。
[0078]
本发明实施例中提到的农作物即指农业上栽培的各种植物。包括粮食作物、经济作物(油料作物、蔬菜作物、花、草、树木)、工业原料作物、饲料作物,药材作物等。农作物能
大批长成或大面积收获,供盈利或口粮用的植物(例如谷物、蔬菜、棉花、亚麻等)。粮食作物以水稻、玉米、豆类、薯类、青稞、蚕豆、小麦为主要作物,本实施例中农作物为玉米,本发明提供的方法可以对玉米旱灾也可适用。
[0079]
本发明实施例提供的方法可以针对农业保险承包中对农作物灾害等级估算的需求,可以用多任务学习的方法,统一多时相、多种灾害的人工智能ai识别评估流程,从而实现单一模型、多灾害并行的解决方案,从而节省灾害评估成本。
[0080]
可选地,本实施例中所述训练数据采用512
×
512像素的图像,重叠16像素,所述训练数据和测试数据的比例为4:1。
[0081]
可选地,所述利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,包括:
[0082]
所述农作物灾害鉴别分级模型使用tensorflow框架,adam作为优化器,初始学习率为0.001,每当训练损失值的当前最小值在最近8个时期epoch内没有变化时,学习率下降0.5倍,25个时期epoch损失值的当前最小值没有变化或训练超过500个时期epoch数时,停止训练,并保存损失loss最小的网络权重,完成训练过程得到训练好的农作物灾害鉴别分级模型。
[0083]
作为一种可选的方案,所述测试数据和所述训练的目标农作物所在区域不相同。
[0084]
作为一种可选的方案,所述测试数据采用交叠裁剪的方法,在对所述农作物灾害图像数据进行切片之前将每个边缘镜像复制50像素作为镜像填充,推理过程使用有重叠的滑动窗口切片作为输入,边缘重叠100像素,裁剪512
×
512大小的图片输入网络,网络推理输出尺寸也为512
×
512,舍弃边缘的50像素,留下中间区域的尺寸为412
×
412,并将结果拼接起来。
[0085]
作为一种可选的方案,农作物灾害图像数据为rgb nir多光谱图像,所述方法还包括:
[0086]
在训练过程中,使用所述农作物灾害图像数据中的rgb三个通道作为所述农作物灾害鉴别分级模型的输入,nir通道用于辅助标签的制作。
[0087]
本发明实施例中还提供了一种基于深度学习的农作物灾害鉴别分级方法,可以适用于准确、高效的识别玉米旱灾并进行分级管理的方法流程,包括:
[0088]
s11、无人机采用dji经纬m600-pro,其上搭载了optosky atp9000高光谱仪,用来拍摄方法所需要的四通道多光谱图像。在训练过程中,使用原始图像中的rgb三个通道作为深度神经网络的输入,而近红外通道则用于辅助标签的制作。
[0089]
s12、使用归一化植被指数(normalized difference vegetation index,ndvi)作为玉米旱灾标签制作的像素点级基础标识。训练标签分为“未受灾玉米”、“轻度旱灾玉米”、“中度旱灾玉米”、“重度旱灾玉米”、“其他”等五类,首先通过目视解译的方法划分出玉米与其他种类地物,然后利用多光谱无人机影像的红色波段(r)和近红外波段(nir)计算得到玉米区域的ndvi值,在玉米区域上对计算出的ndvi值进行多次迭代的均值平滑处理,然后根据由专家评估得到的ndvi边界值划分是否受灾与受灾程度,最后检查标签与原图像,对不合理的标签进行修正。
[0090]
s13、选用deeplabv3 作为基础网络,我们使用se-restnext-50作为骨干网络,在上采样(decoder)部分的所有上采样操作均使用转置卷积方法,并将损失函数从cce损失函
数替换为jaccard损失函数。
[0091]
s14、对网络进行训练和测试的过程中:训练数据为大沟村四张11600
×
12000像素的图像,训练数据被裁剪成2400张512
×
512像素的图像,重叠16像素,按照4:1的比例随机划分为训练数据和验证集,批次大小(batch size)设置为16。
[0092]
s15、使用jaccard loss作为损失函数,使用tensorflow框架,adam作为优化器,初始学习率为0.001,每当训练损失值(training loss)的当前最小值在最近8个epoch内没有变化时,学习率下降0.5倍,25个epoch损失值的当前最小值没有变化或训练超过500个epoch数时,停止训练,并保存loss最小的网络权重。
[0093]
s16、测试数据和训练数据的地点选择确保存在一定程度上的差异化,以增强网络的泛化性。
[0094]
s17、测试数据采用交叠裁剪的方法,在对测试图像进行切片之前将每个边缘镜像复制50像素作为镜像填充,推理过程使用有重叠的滑动窗口切片作为输入,边缘重叠100像素,裁剪512
×
512大小的图片输入网络,网络推理输出尺寸也为512
×
512,舍弃边缘的50像素,留下中间区域的尺寸为412
×
412,并将结果拼接起来。
[0095]
本发明提供的基于深度学习的农作物灾害鉴别分级方法,采用全卷积神经网络在较为精确的样本上进行训练,即可达到实际生产中需要的精度,又能节约对农作物灾害审查评估阶段的时间和人力物力成本。并通过改进了所使用的神经网络模型结构,使得其表现在农作物灾害的考察评估性能上有了进一步的提升。进一步地,充分考虑了在实际生产过程中,图像获取的低成本和便捷性,采用rgb影像作为必要输入,比以往方法更加便捷和低成本。
[0096]
结合图5所示,相应地,本发明实施例中还提供一种基于深度学习的农作物灾害鉴别分级装置500,包括:
[0097]
采集模块501,用于采集农作物灾害图像数据作为预训练数据和测试数据,所述农作物灾害图像数据为四通道多光谱图像;
[0098]
预处理模块502,用于对所述预训练数据进行预处理得到带标注信息的训练数据,所述训练数据的标注步骤包括提取每张农作物灾害图像数据中目标农作物所在区域的归一化植被指数ndvi,所述归一化植被指数ndvi的计算公式为:ndvi=(nir-r)/(nir r),其中nir指遥感图像的近红外波段的反射率,r指红色波段的反射率,对所述归一化植被指数ndvi进行均值平滑处理后确定每张农作物灾害图像数据中目标农作物所在区域的灾害等级标签,灾害等级标签包括未受灾农作物、轻度灾害农作物、中度灾害农作物、重度灾害农作物、其他;
[0099]
训练模块503,用于利用所述训练数据对预先配置的农作物灾害鉴别分级模型进行训练直至收敛得到训练好的农作物灾害鉴别分级模型,利用所述测试数据对所述农作物灾害鉴别分级模型进行测试,所述农作物灾害鉴别分级模型采用deeplabv3 为基础网络架构,采用se-restnext-50作为骨干网络,在上采样部分的所有上采样操作均使用转置卷积方法,损失函数采用jaccard损失函数;
[0100]
识别模块504,用于获取待鉴别地区的图像数据,输入至所述训练好的农作物灾害鉴别分级模型得到所述待鉴别区域的农作物灾害鉴别分级结果。
[0101]
相应地,本发明还提供一种计算机设备,包括:
[0102]
至少一个处理器;以及
[0103]
与所述至少一个处理器通信连接的存储器;其中,
[0104]
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上述的基于深度学习的农作物灾害鉴别分级方法。
[0105]
本发明提供的基于深度学习的农作物灾害鉴别分级方法及装置,采用全卷积神经网络在较为精确的样本上进行训练,即可达到实际生产中需要的精度,又能节约对农作物灾害审查评估阶段的时间和人力物力成本。并通过改进了所使用的神经网络模型结构,使得其表现在农作物灾害的考察评估性能上有了进一步的提升。进一步地,充分考虑了在实际生产过程中,图像获取的低成本和便捷性,采用rgb影像作为该方法的必要输入,比以往方法更加便捷和低成本。
[0106]
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开公开的技术方案所期望的结果,本文在此不进行限制。
[0107]
上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。