一种cpⅲ三维控制网的初始化方法及系统
技术领域
1.本发明涉及于高速铁路三维控制网数据处理技术领域,特别是涉及一种cpⅲ三维控制网的初始化方法及系统。
背景技术:
2.cpⅲ控制网是高速铁路施工和运营维护的基准,没有cpⅲ控制网,就无法保证高速铁路的高平顺性和高平稳性。在高速铁路运营阶段,需要定期对cpⅲ控制网进行复测。随着我国高速铁路里程的不断增长,传统cpⅲ控制网外业测量的低效率和高铁线路每日狭小的时间天窗之间的矛盾日益突出,因此研究建立全线路统一的cpⅲ三维控制网势在必得。
3.cpⅲ三维控制网的建立方法有两种,一种是在测量机器人观测值(方向观测值、斜距观测值和竖直角)与地心三维直角坐标之间建立一种函数关系(张正禄,工程测量学,武汉大学出版社,2013年第2版),将已知点三维坐标传递到各cpⅲ点,完成三维控制网的初始化,再利用最小二乘法估计各cpⅲ点坐标的最优估计值;另一种方法则是利用布尔萨模型在测站坐标和地心三维直角坐标之间建立一种函数关系(李建章,cpⅲ控制网数据处理方法,电子工业出版社,2021年第1版),将测站坐标转换到地心坐标,完成三维控制网的初始化,再利用最小二乘法估计各cpⅲ点坐标的最优估计值。
4.上述两种方法都需要利用布尔萨模型进行坐标转换完成三维控制网的初始化。然而cpⅲ三维控制网与线路长度一样长,仅仅简单的选取三个公共点利用布尔萨模型进行旋转、尺度变换、平移完成初始化,对于动辄上千公里的高铁线路而言,最终坐标转换偏差相当大,无法进行后续的参数估计;如果选择所有的公共点,则需要首先利用三个公共点进行坐标初变换,再利用布尔萨模型通过最小二乘法估计求取更精确的点位坐标。由于布尔萨模型是一个非线性模型,在解算过程中还需要迭代多次才能获得最优解,显然这种初始化方式计算工作量非常大。譬如1000km的线路,每60m一对点,每120米一个测站,则会有33333个cpⅲ点,8333个测站,100000个观测值,需要进行8334次坐标转换和8334次以上的最小二乘估计才能完成cpⅲ三维控制网的初始化。
技术实现要素:
5.本发明的目的是提供一种cpⅲ三维控制网的初始化方法及系统,能够减小cpⅲ三维控制网的初始化时的计算量。
6.为实现上述目的,本发明提供了如下方案:
7.一种cpⅲ三维控制网的初始化方法,包括:
8.分别获取cpⅲ三维控制网中多个基准点的源坐标系坐标和目标坐标系坐标;
9.根据多个所述基准点的源坐标系坐标,确定支点的源坐标系坐标;
10.根据多个所述基准点的目标坐标系坐标,确定支点的目标坐标系坐标;
11.分别获取cpⅲ三维控制网中多个待转换点的源坐标系坐标;
12.根据支点的源坐标系坐标和目标坐标系坐标、多个所述基准点的源坐标系坐标和
目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个所述待转换点分别与每个所述基准点的误差方程;
13.根据多个误差方程构建误差方程矩阵;
14.根据所述误差方程矩阵,利用最小二乘法确定多个待转换点的目标坐标系坐标。
15.可选的,所述支点的源坐标系坐标为:
[0016][0017]
其中,xo、yo、zo分别为支点的在源坐标系下的x坐标、y坐标、z坐标,m为cpⅲ三维控制网中基准点的数量;pi为第i个基准点的权重;xi、yi、zi为第i个基准点的在源坐标系下的x坐标、y坐标、z坐标;
[0018]
所述支点的目标坐标系坐标为:
[0019][0020][0021]
其中,xo、yo、zo分别为支点的在目标坐标系下的x坐标、y坐标、z坐标;xi、yi、zi分别为第i个基准点在目标坐标系下的x坐标、y坐标、z坐标。
[0022]
可选的,所述根据支点的源坐标系坐标和目标坐标系坐标、多个所述基准点的源坐标系坐标和目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个所述待转换点分别与每个所述基准点的误差方程,具体包括:
[0023]
确定任一待转换点为当前待转换点;
[0024]
确定任一基准点为当前基准点;
[0025]
根据支点的源坐标系坐标和目标坐标系坐标、所述当前基准点的源坐标系坐标和目标坐标系坐标以及所述当前待转换点的源坐标系坐标,确定所述当前待转换点和所述当前基准点的基转误差方程;所述误差方程包括基转误差方程和转换误差方程;
[0026]
更新所述当前基准点并返回步骤“根据支点的源坐标系坐标和目标坐标系坐标、所述当前基准点的源坐标系坐标和目标坐标系坐标以及所述当前待转换点的源坐标系坐标,确定所述当前待转换点和所述当前基准点的基转误差方程”,直至遍历所述cpⅲ三维控制网中所有基准点,得到所述当前待转换点分别与每个所述基准点的基转误差方程;
[0027]
更新所述当前待转换点,并返回步骤“确定任一基准点为当前基准点”,直至遍历所述cpⅲ三维控制网中所有待转换点,得到多个所述待转换点分别与每个所述基准点的基转误差方程。
[0028]
可选的,在所述遍历所述cpⅲ三维控制网中所有待转换点,得到多个所述待转换点分别与每个所述基准点的基转误差方程之后,还包括:
[0029]
确定任意两个基准点为当前基准点组;
[0030]
根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程;
[0031]
更新所述当前基准点组,并返回步骤“根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程”直至遍历所有基准点,得到多个转换误差方程。
[0032]
可选的,
[0033]
所述基转误差方程为:v
oai
=δx
oa
xi δy
oa
yi δz
oazi-l
oaij
k-l
oaij
;
[0034]
其中,l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo) δx
oa
xo δy
oayo
δz
oazo
;
[0035]
l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo);
[0036]
δx
oa
=x
o-xa;
[0037]
δy
oa
=y
o-ya;
[0038]
δz
oa
=z
o-za;
[0039]
式中,l
oai
为误差方程第一常数项;δx
oa
、δy
oa
、δz
oa
分别为支点与基准点a目标坐标系下在x方向上的距离、在y方向上的距离、在z方向上的距离;l
oaij
为向量积观测值;k为缩放因子;l
oaij
为误差方程第二常数项;xa、ya、za分别为基准点a的在源坐标系下的x坐标、y坐标、z坐标;
[0040]
所述转换误差方程为:v
oab
=-l
oab
k-l
oab
;
[0041]
其中,l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo)-δx
oa
(x
b-xo)-δy
oa
(y
b-yo)-δz
oa
(z
b-zo);
[0042]
l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo);
[0043]
式中,v
oab
、l
oab
、l
oab
分别表示观测值改正数、观测值及误差方程常数项;xb、yb、zb分别为基准点b的在源坐标系下的x坐标、y坐标、z坐标。
[0044]
一种cpⅲ三维控制网的初始化系统,包括:
[0045]
基准点坐标获取模块,用于分别获取cpⅲ三维控制网中多个基准点的源坐标系坐标和目标坐标系坐标;
[0046]
支点源坐标系坐标确定模块,用于根据多个所述基准点的源坐标系坐标,确定支点的源坐标系坐标;
[0047]
支点目标坐标系坐标确定模块,用于根据多个所述基准点的目标坐标系坐标,确定支点的目标坐标系坐标;
[0048]
待转换点源坐标系坐标获取模块,用于分别获取cpⅲ三维控制网中多个待转换点的源坐标系坐标;
[0049]
误差方程确定模块,用于根据支点的源坐标系坐标和目标坐标系坐标、多个所述基准点的源坐标系坐标和目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个所述待转换点分别与每个所述基准点的误差方程;
[0050]
误差方程矩阵构建模块,用于根据多个误差方程构建误差方程矩阵;
[0051]
待转换点目标坐标系坐标确定模块,用于根据所述误差方程矩阵,利用最小二乘法确定多个待转换点的目标坐标系坐标。
[0052]
可选的,所述支点的源坐标系坐标为:
[0053][0054]
其中,xo、yo、zo分别为支点的在源坐标系下的x坐标、y坐标、z坐标,m为cpⅲ三维控制网中基准点的数量;pi为第i个基准点的权重;xi、yi、zi为第i个基准点的在源坐标系下的x坐标、y坐标、z坐标;
[0055]
所述支点的目标坐标系坐标为:
[0056][0057]
其中,xo、yo、zo分别为支点的在目标坐标系下的x坐标、y坐标、z坐标;xi、yi、zi分别为第i个基准点在目标坐标系下的x坐标、y坐标、z坐标。
[0058]
可选的,所述误差方程确定模块,具体包括:
[0059]
当前待转换点确定单元,用于确定任一待转换点为当前待转换点;
[0060]
当前基准点确定单元,用于确定任一基准点为当前基准点;
[0061]
基转误差方程确定单元,用于根据支点的源坐标系坐标和目标坐标系坐标、所述当前基准点的源坐标系坐标和目标坐标系坐标以及所述当前待转换点的源坐标系坐标,确定所述当前待转换点和所述当前基准点的基转误差方程;所述误差方程包括基转误差方程和转换误差方程;
[0062]
当前基准点更新单元,用于更新所述当前基准点并调用所述基转误差方程确定单元,直至遍历所述cpⅲ三维控制网中所有基准点,得到所述当前待转换点分别与每个所述基准点的基转误差方程;
[0063]
当前待转换点更新单元,用于更新所述当前待转换点,并调用所述当前基准点确定单元,直至遍历所述cpⅲ三维控制网中所有待转换点,得到多个所述待转换点分别与每个所述基准点的基转误差方程。
[0064]
可选的,所述误差方程确定模块,还包括:
[0065]
当前基准点组确定单元,用于确定任意两个基准点为当前基准点组;
[0066]
转换误差方程构建单元,用于根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程;
[0067]
当前基准点组更新单元,用于更新所述当前基准点组,并调用所述转换误差方程构建单元直至遍历所有基准点,得到多个转换误差方程。
[0068]
可选的,
[0069]
所述基转误差方程为:v
oai
=δx
oa
xi δy
oa
yi δz
oazi-l
oaij
k-l
oaij
;
[0070]
其中,l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo) δx
oa
xo δy
oayo
δz
oazo
;
[0071]
l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo);
[0072]
δx
oa
=x
o-xa;
[0073]
δy
oa
=y
o-ya;
[0074]
δz
oa
=z
o-za;
[0075]
式中,l
oai
为误差方程第一常数项;δx
oa
、δy
oa
、δz
oa
分别为支点与基准点a目标坐标系下在x方向上的距离、在y方向上的距离、在z方向上的距离;l
oaij
为向量积观测值;k为缩放因子;l
oaij
为误差方程第二常数项;xa、ya、za分别为基准点a的在源坐标系下的x坐标、y坐标、z坐标;
[0076]
所述转换误差方程为:v
oab
=-l
oab
k-l
oab
;
[0077]
其中,l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo)-δx
oa
(x
b-xo)-δy
oa
(y
b-yo)-δz
oa
(z
b-zo);
[0078]
l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo);
[0079]
式中,v
oab
、l
oab
、l
oab
分别表示观测值改正数、观测值及误差方程常数项;xb、yb、zb分别为基准点b的在源坐标系下的x坐标、y坐标、z坐标。
[0080]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0081]
本发明提供了一种cpⅲ三维控制网的初始化方法及系统,其中,方法包括:分别获取cpⅲ三维控制网中多个基准点的源坐标系坐标和目标坐标系坐标;根据多个基准点的源坐标系坐标,确定支点的源坐标系坐标;根据多个基准点的目标坐标系坐标,确定支点的目标坐标系坐标;分别获取cpⅲ三维控制网中多个待转换点的源坐标系坐标;根据支点的源坐标系坐标和目标坐标系坐标、多个基准点的源坐标系坐标和目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个待转换点分别与每个基准点的误差方程;根据多个误差方程构建误差方程矩阵;根据误差方程矩阵,利用最小二乘法确定多个待转换点的目标坐标系坐标。本发明通过构建误差方程矩阵,能够减小cpⅲ三维控制网的初始化时的计算量。
附图说明
[0082]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0083]
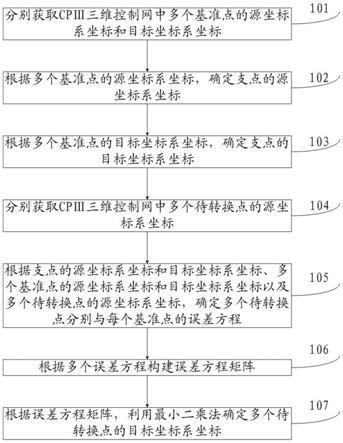
图1为本发明实施例中cpⅲ三维控制网的初始化方法流程图;
[0084]
图2为本发明实施例中点位示意图。
具体实施方式
[0085]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0086]
本发明的目的是提供一种cpⅲ三维控制网的初始化方法及系统,能够减小cpⅲ三维控制网的初始化时的计算量。
[0087]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0088]
本发明中源坐标系指测站三维直角坐标系,每个测站一个独立的坐标系统。原点在仪器中心,x轴指向水平度盘0刻度,z轴垂直仪器水平度盘指向地面方向,y轴垂直x、z两轴构成左手三维直角坐标系。
[0089]
本发明中目标坐标系指地心三维直角坐标系,原点在地球质量中心,x轴指向格林尼治平子午面与地球赤道的交点,z指向协议地球北极,y垂直于xz两轴构成左手三维直角坐标系。在我国高铁建设中目标坐标系特指cgcs2000坐标系。
[0090]
如图1,本发明提供了一种cpⅲ三维控制网的初始化方法,包括:
[0091]
步骤101:分别获取cpⅲ三维控制网中多个基准点的源坐标系坐标和目标坐标系坐标;
[0092]
步骤102:根据多个基准点的源坐标系坐标,确定支点的源坐标系坐标;
[0093]
步骤103:根据多个基准点的目标坐标系坐标,确定支点的目标坐标系坐标;
[0094]
步骤104:分别获取cpⅲ三维控制网中多个待转换点的源坐标系坐标;
[0095]
步骤105:根据支点的源坐标系坐标和目标坐标系坐标、多个基准点的源坐标系坐标和目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个待转换点分别与每个基准点的误差方程;
[0096]
步骤106:根据多个误差方程构建误差方程矩阵;
[0097]
步骤107:根据误差方程矩阵,利用最小二乘法确定多个待转换点的目标坐标系坐标。
[0098]
具体的,支点的源坐标系坐标为:
[0099][0100]
其中,xo、yo、zo分别为支点的在源坐标系下的x坐标、y坐标、z坐标,m为cpⅲ三维控制网中基准点的数量;pi为第i个基准点的权重;xi、yi、zi为第i个基准点的在源坐标系下的x坐标、y坐标、z坐标;
[0101]
支点的目标坐标系坐标为:
[0102][0103][0104]
其中,xo、yo、zo分别为支点的在目标坐标系下的x坐标、y坐标、z坐标;xi、yi、zi分别
为第i个基准点在目标坐标系下的x坐标、y坐标、z坐标。
[0105]
步骤105,具体包括:
[0106]
确定任一待转换点为当前待转换点;
[0107]
确定任一基准点为当前基准点;
[0108]
根据支点的源坐标系坐标和目标坐标系坐标、当前基准点的源坐标系坐标和目标坐标系坐标以及当前待转换点的源坐标系坐标,确定当前待转换点和当前基准点的基转误差方程;误差方程包括基转误差方程和转换误差方程;
[0109]
更新当前基准点并返回步骤“根据支点的源坐标系坐标和目标坐标系坐标、当前基准点的源坐标系坐标和目标坐标系坐标以及当前待转换点的源坐标系坐标,确定当前待转换点和当前基准点的基转误差方程”,直至遍历cpⅲ三维控制网中所有基准点,得到当前待转换点分别与每个基准点的基转误差方程;
[0110]
更新当前待转换点,并返回步骤“确定任一基准点为当前基准点”,直至遍历cpⅲ三维控制网中所有待转换点,得到多个待转换点分别与每个基准点的基转误差方程。
[0111]
在遍历cpⅲ三维控制网中所有待转换点,得到多个待转换点分别与每个基准点的基转误差方程之后,还包括:
[0112]
确定任意两个基准点为当前基准点组;
[0113]
根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程;
[0114]
更新当前基准点组,并返回步骤“根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程”直至遍历所有基准点,得到多个转换误差方程。
[0115]
具体的,
[0116]
基转误差方程为:v
oai
=δx
oa
xi δy
oa
yi δz
oazi-l
oaij
k-l
oaij
;
[0117]
其中,l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo) δx
oa
xo δy
oayo
δz
oazo
;
[0118]
l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo);
[0119]
δx
oa
=x
o-xa;
[0120]
δy
oa
=y
o-ya;
[0121]
δz
oa
=z
o-za;
[0122]
式中,l
oai
为误差方程第一常数项;δx
oa
、δy
oa
、δz
oa
分别为支点与基准点a目标坐标系下在x方向上的距离、在y方向上的距离、在z方向上的距离;l
oaij
为向量积观测值;k为缩放因子;l
oaij
为误差方程第二常数项;xa、ya、za分别为基准点a的在源坐标系下的x坐标、y坐标、z坐标;
[0123]
转换误差方程为:v
oab
=-l
oab
k-l
oab
;
[0124]
其中,l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo)-δx
oa
(x
b-xo)-δy
oa
(y
b-yo)-δz
oa
(z
b-zo);
[0125]
l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo);
[0126]
式中,v
oab
、l
oab
、l
oab
分别表示观测值改正数、观测值及误差方程常数项;xb、yb、zb分别为基准点b的在源坐标系下的x坐标、y坐标、z坐标。
[0127]
本发明所基于的原理是三维空间两基线的向量积在不同三维空间的不变性。cpⅲ三维控制网的初始化包括各测站之间坐标系的统一和测站坐标与地心三维坐标系之间的统一,为了叙述方便,如下将源坐标系用xyz来表示,目标坐标系用xyz来表示。
[0128]
设在xyz空间的任意两基线向量经过一系列统一的空间变换之后,得到xyz空间的两基线向量则有
[0129][0130]
考虑到两空间尺度的差异,引入缩放因子k,则得
[0131][0132]
通常情况下,选取两已知基准点构成基线向量,而为两待求点构成基线向量,或者其中一点为基准点,另一点为待求点构成基线向量。
[0133]
如图2所示,空心圆圈、空心三角形分别为待转换点、基准点。实心三角形为支点,其点位通过基准点的加权平均值获得。基准点、支点在两坐标空间的坐标皆已知,待转换点在xyz空间的坐标已知,在xyz空间的坐标值为待求参数。
[0134]
设i、j、o、a四点在xyz空间的坐标分别为(x
i y
i zi)
t
、(x
j y
j zj)
t
,x
o y
o zo)
t
、(x
a y
a za)
t
,在xyz空间的坐标分别为(x
i y
i zi)
t
、x
j y
j zj)
t
,(x
o y
o zo)
t
、(x
a y
a za)
t
。
[0135]
则可得:
[0136][0137]
由式(2)可得
[0138]
l
oaij
(1 k)=δx
oa
(x
j-xi) δy
oa
(y
j-yi) δz
oa
(z
j-zi) δ
oaij
ꢀꢀꢀ
(3)
[0139]
其中,
[0140]
l
oaij
=(x
a-xo)(x
j-xi) (y
a-yo)(y
j-yi) (z
a-zo)(z
j-zi)
[0141]
l
oaij
为向量积观测值,δ
oaij
为观测值误差。
[0142]
由式(3)可得:
[0143]
l
oaij
=δx
oa
(x
j-xi) δy
oa
(y
j-yi) δz
oa
(z
j-zi)-l
oaij
k δ
oaij
ꢀꢀꢀ
(4)
[0144]
观测值l
oaij
的权为
[0145]
式(4)即本发明提出的一种用于cpⅲ三维控制网初始化的三维直角坐标变换线性模型。
[0146]
在实际计算中,选择以支点为起点,基准点为终点的基线向量。有几个基准点,则可形成几个基线向量,分别与构成向量积观测值。
[0147]
的构建模式有两种,方式一:选择以支点为起点,待转换点为终点构成基线向量。方式二:根据实际情况选择任意两待转换点构成基线向量,但这种方式至少要有一个
δz
oa
(z
b-zo);
[0171]
l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo);
[0172]
⑥
重复步骤
⑤
,直至所有基准点皆参与计算误差方程为止。
[0173]
⑸
将上述步骤建立的误差方程写成矩阵形式,再利用最小二乘法获取各待转换点在目标坐标系坐标空间的坐标值,并进行精度评定。
[0174]
此外,本发明还提供了一种cpⅲ三维控制网的初始化系统,包括:
[0175]
基准点坐标获取模块,用于分别获取cpⅲ三维控制网中多个基准点的源坐标系坐标和目标坐标系坐标;
[0176]
支点源坐标系坐标确定模块,用于根据多个基准点的源坐标系坐标,确定支点的源坐标系坐标;
[0177]
支点目标坐标系坐标确定模块,用于根据多个基准点的目标坐标系坐标,确定支点的目标坐标系坐标;
[0178]
待转换点源坐标系坐标获取模块,用于分别获取cpⅲ三维控制网中多个待转换点的源坐标系坐标;
[0179]
误差方程确定模块,用于根据支点的源坐标系坐标和目标坐标系坐标、多个基准点的源坐标系坐标和目标坐标系坐标以及多个待转换点的源坐标系坐标,确定多个待转换点分别与每个基准点的误差方程;
[0180]
误差方程矩阵构建模块,用于根据多个误差方程构建误差方程矩阵;
[0181]
待转换点目标坐标系坐标确定模块,用于根据误差方程矩阵,利用最小二乘法确定多个待转换点的目标坐标系坐标。
[0182]
其中,支点的源坐标系坐标为:
[0183][0184]
其中,xo、yo、zo分别为支点的在源坐标系下的x坐标、y坐标、z坐标,m为cpⅲ三维控制网中基准点的数量;pi为第i个基准点的权重;xi、yi、zi为第i个基准点的在源坐标系下的x坐标、y坐标、z坐标;
[0185]
支点的目标坐标系坐标为:
[0186][0187]
其中,xo、yo、zo分别为支点的在目标坐标系下的x坐标、y坐标、z坐标;xi、yi、zi分别为第i个基准点在目标坐标系下的x坐标、y坐标、z坐标。
[0188]
具体的,误差方程确定模块,具体包括:
[0189]
当前待转换点确定单元,用于确定任一待转换点为当前待转换点;
[0190]
当前基准点确定单元,用于确定任一基准点为当前基准点;
[0191]
基转误差方程确定单元,用于根据支点的源坐标系坐标和目标坐标系坐标、当前基准点的源坐标系坐标和目标坐标系坐标以及当前待转换点的源坐标系坐标,确定当前待转换点和当前基准点的基转误差方程;误差方程包括基转误差方程和转换误差方程;
[0192]
当前基准点更新单元,用于更新当前基准点并调用基转误差方程确定单元,直至遍历cpⅲ三维控制网中所有基准点,得到当前待转换点分别与每个基准点的基转误差方程;
[0193]
当前待转换点更新单元,用于更新当前待转换点,并调用当前基准点确定单元,直至遍历cpⅲ三维控制网中所有待转换点,得到多个待转换点分别与每个基准点的基转误差方程。
[0194]
具体的,误差方程确定模块,还包括:
[0195]
当前基准点组确定单元,用于确定任意两个基准点为当前基准点组;
[0196]
转换误差方程构建单元,用于根据当前基准点组中基准点的源坐标系坐标和目标坐标系坐标,构建源坐标系和目标坐标系的转换误差方程;
[0197]
当前基准点组更新单元,用于更新当前基准点组,并调用转换误差方程构建单元直至遍历所有基准点,得到多个转换误差方程。
[0198]
优选地,
[0199]
基转误差方程为:v
oai
=δx
oa
xi δy
oa
yi δz
oazi-l
oaij
k-l
oaij
;
[0200]
其中,l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo) δx
oa
xo δy
oayo
δz
oazo
;
[0201]
l
oai
=(x
a-xo)(x
i-xo) (y
a-yo)(y
i-yo) (z
a-zo)(z
i-zo);
[0202]
δx
oa
=x
o-xa;
[0203]
δy
oa
=y
o-ya;
[0204]
δz
oa
=z
o-za;
[0205]
式中,l
oai
为误差方程第一常数项;δx
oa
、δy
oa
、δz
oa
分别为支点与基准点a目标坐标系下在x方向上的距离、在y方向上的距离、在z方向上的距离;l
oaij
为向量积观测值;k为缩放因子;l
oaij
为误差方程第二常数项;xa、ya、za分别为基准点a的在源坐标系下的x坐标、y坐标、z坐标;
[0206]
转换误差方程为:v
oab
=-l
oab
k-l
oab
;
[0207]
其中,l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo)-δx
oa
(x
b-xo)-δy
oa
(y
b-yo)-δz
oa
(z
b-zo);
[0208]
l
oab
=(x
a-xo)(x
b-xo) (y
a-yo)(y
b-yo) (z
a-zo)(z
b-zo);
[0209]
式中,v
oab
、l
oab
、l
oab
分别表示观测值改正数、观测值及误差方程常数项;xb、yb、zb分别为基准点b的在源坐标系下的x坐标、y坐标、z坐标。
[0210]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0211]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
