用于agv人货分离的安全光栅
技术领域
1.本实用新型涉及物料运输技术领域,尤其涉及物料运输中的人货分离,具体为用于agv人货分离的安全光栅。
背景技术:
2.近年物流行业飞速发展,对物流智能化以及自动化有了更高的要求。其中工业机器人agv(指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车)的应用在整个行业解决方案中占据了很大的比例。传统工业机器人的应用中,为了满足工业现场对安全性的要求,机器人工作站周边都会设置安全围栏以隔绝机器人与外部工作人员发生接触,来杜绝危险的发生。随着agv的推广,机器人工作站需要给agv预留进出通道,同时这也会出现现场工作人员误入的隐患,从而导致危险发生。
3.为了避免危险的发生,通常会在agv进出口设置安全光栅进行进出的检测。但是传统安全光栅通过检测光栅两端是否有物体通过来判断是否需要采取应急动作,而无法区分物体是正常运行的agv,还是误入的工作人员,这给工业现场带来一些困扰。
4.因此本领域技术人员亟需一种结构简单,能够对通过的物体进行区分,且检测准确率高,反应灵敏的安全光栅。
技术实现要素:
5.本实用新型的目的在于克服现有技术的不足,提供一种用于agv人货分离的安全光栅。该安全光栅结构简单,检测准确率高,能够准确判断通过的是avg或是工作人员,而且能够作出及时的提醒。
6.本实用新型提供了用于agv人货分离的安全光栅,该安全光栅包括:对射光电模块1以及漫反射光电模块2,其中,对射光电模块1分别设置在两个相对设置的支架3上,用于发射和接收光电信号;两个漫反射光电模块2相对设置在两个支架3上,用于检测物体通过信号;两个相对设置的漫反射光电模块2检测距离小于两个支架3的间距。
7.进一步的,该安全光栅还包括控制模块4,控制模块4电路连接对射光电模块1和漫反射光电模块2,用于接收以及处理检测信号。
8.进一步的,该安全光栅还包括警报模块5,警报模块5电路连接控制模块4,用于在控制模块4的控制下发出警报。
9.本实用新型的实施方式中,该安全光栅还包括警示灯6,警示灯6电路连接控制模块4,用于在控制模块4的控制下发出警示。
10.本实用新型的实施方式中,对射光电模块1为红外发射接收模块,包括发射端和接收端,发射端和接收端分别设置在两个支架3上,且位置相对。
11.本实用新型的实施方式中,对射光电模块1和漫反射光电模块2在支架1上的位置是上下设置,且检测方向相同。
12.根据上述实施的方式可知,本实用新型提供的用于agv人货分离的安全光栅具有以下益处:相比于现有技术,该安全光栅能够对avg和人进行区分,并且能够及时发出警报,提醒操作人员,避免现场出现危险。并且该安全光栅结构简单,检测准确率高,大大降低了错检率,提升了安全性。
13.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
附图说明
14.下面的附图是本实用新型的说明书的一部分,其绘示了本实用新型的示例实施例,所附附图与说明书的描述一起用来说明本实用新型的原理。
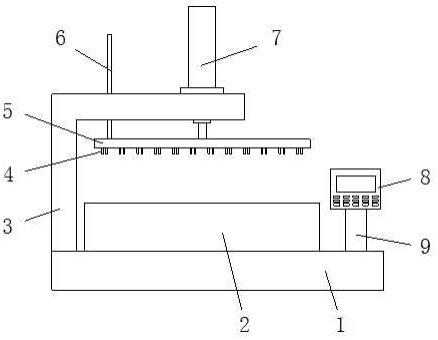
15.图1为本实用新型提供的用于agv人货分离的安全光栅的结构图。
16.图2为本实用新型提供的用于agv人货分离的安全光栅的agv通过时的使用状态图。
17.图3为本实用新型提供的用于agv人货分离的安全光栅的行人通过时的使用状态图。
18.图4为本实用新型提供的用于agv人货分离的安全光栅的电路连接图。
19.附图标记说明:
20.1-对射光电模块、2-漫反射光电模块、3-支架、4-控制模块、5-警报模块、6-警示灯。
具体实施方式
21.现详细说明本实用新型的多种示例性实施方式,该详细说明不应认为是对本实用新型的限制,而应理解为是对本实用新型的某些方面、特性和实施方案的更详细的描述。
22.在不背离本实用新型的范围或精神的情况下,可对本实用新型说明书的具体实施方式做多种改进和变化,这对本领域技术人员而言是显而易见的。由本实用新型的说明书得到的其他实施方式对技术人员而言是显而易见的。本技术说明书和实施例仅是示例性的。
23.本实用新型提供了用于agv人货分离的安全光栅。如图1所示为该安全光栅的结构图,具体实施方式中,该安全光栅包括:对射光电模块1以及漫反射光电模块2。其中,对射光电模块1分别设置在两个相对设置的支架3上,用于发射和接收光电信号。本实施中,该支架3即为agv工作站安全围栏出入口。两个漫反射光电模块2相对设置在两个支架3上,用于检测物体通过信号。且两个相对设置的漫反射光电模块2检测距离总和小于两个支架3的间距。图1中,两个支架1之间上部的连续虚线为对射光电模块1的检测光线。下部两侧的短实线为漫反射光电模块2的检测范围。
24.本实施例中,对射光电模块1为红外发射接收模块,包括发射端和接收端。如图1所示,发射端和接收端分别设置在两个支架3上,且位置相对。发射端用于红外发射,接收端用于红外接收。
25.本实用新型的具体实施方式中,对射光电模块1和漫反射光电模块2在支架1上的位置是上下设置,且检测方向相同。即对射光电模块1可以设置在漫反射光电模块2的上面,
也可以设置在漫反射光电模块2的下面,但是对射光电模块1和漫反射光电模块2的检测方向是相同的。
26.本实用新型的具体实施方式中,单个漫反射光电模块2的检测距离是两个支架3距离的1/4~1/3。本实用新型中,如图2所示,机器人相对于人较宽,通过支架3时会同时触发对射光电模块1和两个漫反射光电模块2。而如图3所示,当人通过支架3时,一种情况是会触发对射光电模块1和支架3一侧的漫反射光电模块2。这种情况下,行人走在两个支架3中偏向于其中一个支架的一侧,并进入到了该侧的漫反射光电模块2的检测范围,触发该侧的漫反射光电模块2。另外一种情况是仅仅触发对射光电模块1。这种情况下,行人走在两个支架3的中间位置,且未进入到两侧的漫反射光电模块2的检测范围,并未触发任何一个漫反射光电模块2。
27.本实用新型的具体实施方式中,如图4所示,该安全光栅还包括控制模块4,控制模块4电路连接对射光电模块1和漫反射光电模块2,用于接收以及处理检测信号。
28.另外,该安全光栅还包括警报模块5,警报模块5电路连接控制模块4,用于在控制模块4的控制下发出警报。当控制模块4接收到对射光电模块1的触发信号以及两个漫反射光电模块2的触发信号时,控制模块4判断为agv通过两支架3之间。
29.当控制模块4接收到对射光电模块1的触发信号以及一个漫反射光电模块2的触发信号时,控制模块4判断为行人通过两支架3之间,并控制警报模块5发出警示声音。
30.当控制模块4仅接收到对射光电模块1的触发信号时,控制模块4判断为行人通过两支架3之间,并控制警报模块5发出警示声音。
31.本实用新型的具体实施方式中,该安全光栅还包括警示灯6,警示灯6电路连接控制模块4,用于在控制模块4的控制下发出警示。当控制模块4判断行人通过时,在触发警报模块5发出警报声音的同时,也会触发警示灯6进行警示闪烁,提醒操作人员。
32.以上所述仅为本实用新型示意性的具体实施方式,在不脱离本实用新型的构思和原则的前提下,任何本领域的技术人员所做出的等同变化与修改,均应属于本实用新型保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。