技术特征:
1.积分型航空发动机执行机构故障估计方法,其特征在于,步骤如下:s1.建立被控对象的状态空间模型;考虑连续时间控制系统如下所示:其中,x(t)∈r
n
表示系统状态,表示系统状态的一阶导数;u(t)∈r
m
表示系统控制输入,f(t)∈r
f
表示执行机构加性故障,w(t)∈r
w
表示系统外部扰动,y(t)∈r
p
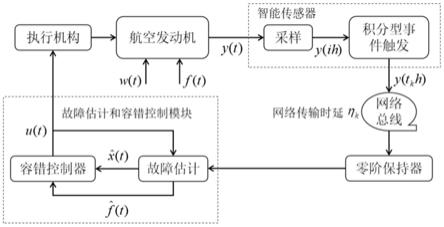
表示系统测量输出,a,b,c,d,e代表系统常值矩阵;设该系统是可观可控的,且rank(b)=rank(b,e)=m;s2.设计积分型事件触发条件;积分型事件触发机制如下所示:其中,ih=t
k
h lh,ω为权值矩阵,δ为触发阈值。需要指出的是在事件触发条件中,事件触发间隔大于等于采样周期h,从根本上避免了zeno现象;考虑网络通信时延和零阶保持器的特性,故障估计观测器的输入t∈[t
k
h η
k
,t
k 1
h η
k 1
),其中η
k
表示网络诱导时延,k∈n,满足η
m
≤η
k
≤η
m
;将时间区间[t
k
h η
k
,t
k 1
h η
k 1
)进行如下分割:其中,定义分段时变时滞τ(t)和触发误差向量e
y
(t)分别为:从而在区间[t
k
h η
k
,t
k 1
h η
k 1
)上,故障观测器输入定义变量τ
m
=η
m
,τ
m
=h η
m
,d=τ
m-τ
m
,则变量τ(t)满足τ
m
≤τ(t)≤τ
m
。在此,采用下面的simpson公式来实现近似精度和计算复杂度的平衡:
当积分周期t足够小且系统输出幅值有界时,近似误差是可以忽略的,其中,ξ是区间[t-τ(t)-t,t-τ(t)]上的某点;积分项可以近似表达为:其中,s3.设计基于积分型事件触发机制的故障观测器,构建增广的误差动态系统构造基于积分型事件触发机制的故障观测器如下:其中,表示观测器状态变量,表示观测器的输出,表示故障估计值,l,f为需要设计的观测器增益矩阵,表示观测器状态变量的一阶导数,表示故障估计值的一阶导数;定义变量e(t)=col{e
x
(t),e
f
(t)},(t)},表示故障项的一阶导数,则增广误差动态系统可表示为:其中其中下面给出部分引理;引理1.对于正定矩阵r>0和可积函数{w(u)|u∈[a,b]},下面不等式成立:引理2.定义函数空间w[a,b),则此空间中函数[a,b]
→
r
n
在区间[a,b]上是绝对连续的而且左极限存在,同时该函数的一阶导数平方可积;若函数x(t)属于函数空间w[a,b),且x(a)=0,则对于任意正定矩阵r有下面等式成立:引理3.对于列满秩矩阵h∈r
n
×
m
,总是存在两个正定矩阵x∈r
n
×
n
和y∈r
m
×
m
满足:
其中,x1∈r
m
×
n
,x2∈r
(n-m)
×
n
,σ=diag{σ1,σ2,...,σ
m
},σ
i
为矩阵h的非零奇异值,i=1,2,...,m;若矩阵w∈r
n
×
n
可以写成如下形式:其中,w
11
>0,w
22
>0,则存在非奇异矩阵z∈r
m
×
m
满足hz=wh;引理4.对任意矩阵满足g∈r
n
×
n
,变量0≤d(t)≤d,以及向量函数x:[-d,0]
→
r
n
,则下面的积分不等式成立:其中,ν(t)=col{x(t),x(t-d(t)),x(t-d)}.s4.通过求解以下的多目标优化问题,求得故障观测器增益l和f;为了对航空发动机控制系统的执行机构故障进行估计同时使得系统对外界干扰具有鲁棒性,通过设计故障估计观测器使得误差动态系统是渐近稳定的且满足如下的多目标约束:||e
f
(t)||2≤γ1||ν(t)||2,(9-a)||e
f
(t)||2≤γ2||e
y
(t)||2,(9-b)||e
x
(t)||2≤γ3||e
y
(t)||2.(9-c)定理1给定参数h,η
m
,η
m
,γ1,γ2,γ3,t为正数;如果存在正定矩阵p,q
j
,r
j
,w
j
,m
j
,n
j
(j=0,1,2),存在矩阵y,g
j
(j=0,1,2),u满足使得
其中,γ
12
=λ
12
=ψ
12
=p-u
t
ae
t
u,γ
13
=λ
13
=ψ
13
=[r
0 r
1 r2],],],γ
33
=λ
33
=ψ
33
=diag{m
0-q
0-r
0-n0,m
1-q
1-r
1-n1,m
2-q
2-r
2-n2},γ
34
=γ
45
=λ
34
=λ
45
=ψ
34
=ψ
45
=diag{n
0-g0,n
1-g1,n
2-g2},γ
35
=λ
35
=ψ
35
=diag{g0,g1,g2},γ
55
=λ
55
=ψ
55
=diag{-m
0-n0,-m
1-n1,-m
2-n2},λ
16
=λ
26
=ψ
16
=ψ
26
=-y,y,则误差动态系统(8)是渐近稳定的且满足多目标优化约束(9);同时,若式(10)中的不等式有可行解,则故障观测器增益矩阵l,f可由求得;证明:构造lyapunov-krasovskii函数如下所示:
其中,v1(t)=e
t
(t)pe(t),(t)pe(t),(t)pe(t),将lyapunov-krasovskii函数对时间求导,krasovskii函数对时间求导,krasovskii函数对时间求导,krasovskii函数对时间求导,由引理1可以得到下面不等式成立:由引理4可得,对于任意矩阵g
j
满足下面不等式成立:其中,根据式(8),对任意矩阵u,则有:首先考虑e
y
(t)=0;构造辅助函数如下所示:
其中,为v(t)的一阶导数;定义变量:定义变量:则由式(12)-(15)可得:设显然定理1中的不等式(10-a)可以保证f1(t)≤0;在零初始条件下,将f1(t)≤0从零到正无穷积分可得到不等式(9-a)成立;类似于上述过程,考虑系统中ν(t)=0;定义辅助函数如下所示:定义变量:定义变量:由可以得到成立,进而可以得到不等式(9-b)成立;同理,定义辅助函数如下所示:经推导得到不等式成立,进而可以得到不等式(9-c)成立;当e
y
(t)=ν(t)=0时,可以由定理1中的不等式(10)得到从而可以保证误差系统(8)渐近稳定;s5.基于步骤s4设计的故障估计观测器,进行事件触发机制和容错控制器的联合设计;考虑容错控制器的表达式如下:其中k是待设计的控制器增益,b
是矩阵b的伪逆,矩阵b
满足(i-bb
)e=0;将容错控制器(17)带入故障观测器(7),并定义变量v
e
(t)=col{e
f
(t),w(t)},可得到闭环系统如下所示:可得到闭环系统如下所示:
定理2给定正数δ,h,η
m
,η
m
,γ
s
和控制器增益k;如果存在非负参数σ
01
,σ
02
,正定矩阵h,ω,x
j
,s
1j
,s
2j
,t
1j
,t
2j
(j=0,1,2),矩阵v,t
2j
,z
j
满足使得:其中,其中,其中,ξ
33
=diag{s
20-s
10-t
10-t
20
,s
21-s
11-t
11-t
21
,s
22-s
12-t
12-t
22
},ξ
24
=[v
t
b
z1 v
t
b
z2 v
t
b
z3
],ξ
34
=ξ
45
=diag{t
20-z0,t
21-z1,t
22-z2},ξ
35
=diag{z0,z1,z2},ξ
55
=diag{-s
20-t
20
,-s
21-t
21
,-s
22-t
22
},i1=[i i],i2=[0 i],i3=[i 0],则误差动态系统(18)是渐近稳定的,且满足||x(t)||2≤γ
s
||v
e
(t)||2;证明:构造lyapunov-krasovskii函数如下所示:其中,
将lyapunov-krasovskii函数(20)对时间求导,krasovskii函数(20)对时间求导,krasovskii函数(20)对时间求导,krasovskii函数(20)对时间求导,由引理1和引理4可得,下面不等式成立:下面不等式成立:其中,定义辅助函数如下所示:根据(2)中的事件触发条件,可以得到下式成立:基于在式(9)中建立的多目标约束,对于任意的σ
0i
≥0(i=1,2),下面不等式成立:
再根据式(18),对于任意矩阵v,可得下面等式成立:结合上式(21)~(25),可以得到下面不等式成立:其中,其中,基于定理2条件中的ξ<0,可以得到f
s
(t)≤0,将不等式两边从0到正无穷积分,可以得到||x(t)||2≤γ
s
||v
e
(t)||2;如果考虑v
e
(t)=0;则由式(19)可以得到从而系统(18)是渐近稳定的;然而在式(19)中,控制器增益和未知矩阵变量耦合,难以通过现有优化方法求解,因此可以通过下述定理求出容错控制器增益;定理3给定正数δ,h,η
m
,η
m
,γ
s
;如果存在非负参数σ
01
,σ
02
,正定矩阵h,x
j
,ω,s
1j
,s
2j
,t
1j
,t
2j
,j=0,1,2,w
0i
(i=1,2),矩阵v2,v3,t
2j
,z
j
,k’满足使得:其中,ξ'
13
=ξ
13
,ξ
14
=ξ'
14
,ξ'
16
=ξ'
26
=v
t
d
e
,ξ'
17
=ξ'
27
=v
t
f
z
,ξ'
22
=ξ
22
,ξ'
24
=ξ
24
,ξ'
33
=ξ
33
,ξ'
34
=ξ
34
,ξ'
34
=ξ'
45
,ξ'
44
=ξ
44
ξ'
55
=ξ
55
,ξ'
66
=ξ
66
,ξ'
77
=ξ
77
,
v1=g
01t
w
01
g
01
g
02t
w
02
g
02
,其中g
01
,g
02
表达式如(29)所示,则误差动态系统(18)是渐近稳定的,且满足||x(t)||2≤γ
s
||v
e
(t)||2,同时若不等式有可行解,则容错控制器增益表达式如下所示:证明:对于列满秩矩阵b,存在正交矩阵g0∈r
n
×
n
,z∈r
m
×
m
满足:其中,g
01
∈r
m
×
n
,g
02
∈r
(n-m)
×
n
,γ=diag{σ1,σ2,...,σ
m
},σ
i
表示矩阵b的非零奇异值,i=1,2,...,m;根据引理3,若矩阵v1可表示为:其中,w
01
>0,w
02
>0,则存在非奇异矩阵m使得v1b=bm;选取式(19)中的矩阵并定义矩阵k'=mk。显然,不等式(19)可以由不等式(27)得到。采用定理2的证明过程,系统(18)是渐近稳定的且满足||x(t)||2≤r
s
||v
e
(t)||2;同时,控制器增益k可以通过式(28)求得。
技术总结
本发明提供积分型事件触发的航空发动机执行机构故障估计方法,属于航空发动机故障诊断技术领域。本发明采用积分型事件触发机制与故障观测器相结合,将事件触发判断机制中的传感器采样值从某一时刻的瞬时值变为一段时间的平均值,同时考虑网络传输时延效应,从而可以有效降低测量随机噪声对故障估计结果的影响并减少网络通讯负载;最后采用某航空发动机控制系统模型来验证所提出的基于积分型事件触发机制的故障估计和容错控制方法的有效性。触发机制的故障估计和容错控制方法的有效性。触发机制的故障估计和容错控制方法的有效性。
技术研发人员:孙希明 马永康 费中阳 杨柳
受保护的技术使用者:大连理工大学
技术研发日:2022.01.19
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。